基于dSPACE的汽车主动前轮转向试验台设计
2011-04-07王利刚刘国良
高 峰,王利刚,刘国良,2
(1.北京航空航天大学交通科学与工程学院,北京100191;2.徐州空军学院航空兵军交运输指挥系,江苏徐州221000)
0 前言
汽车的主动前轮转向系统通过对前轮施加一个不依赖于驾驶员转向盘输入的附加转角,实现可变的转向传动比,提高车辆的操纵稳定性[1-2]。根据机械结构的不同,主动转向分为机械式和线控式,机械式是在原机械转向系统基础上,通过一些机械结构(比如行星齿轮机构)叠加一个前轮转角;而线控转向则去除了机械式转向连接,通过控制器综合驾驶员输入和稳定性等要求,由转向电机实现主动的前轮转向。由于法规、安全性、成本等原因,线控转向的实车应用仍存在一些问题,而机械式主动转向系统则在主动转向功能失效时由于机械连接的保证,仍能正常驾驶。
机械式主动转向系统以宝马和采埃孚公司联合开发的主动前轮转向系统为代表,它通过行星齿轮机构增加了一个输入自由度,从而实现附加转向,目前已经在宝马的“3系”和“5系”上采用,而美国的德尔福、日本的光洋精工等也已经有相关的产品。国内在机械式主动转向的研究方面开始的比较晚,当前主要集中于对其结构和功能介绍以及基于主动转向的车辆操纵稳定性控制算法研究上[3-6]。
为了验证主动转向系统的功能,同时也为了加快主动前轮转向系统的开发,本文在研究了宝马和采埃孚联合开发的主动前轮转向系统系统的基础上,基于dSPACE实时仿真系统,设计并搭建了机械式主动前轮转向硬件在环仿真试验台。
1 主动转向系统的功能
1.1 可变传动比
主动转向系统可根据车速和驾驶员要求的转向角改变转向器的传动比,当车速较高时为较大的传动比,车速较低时为较小的传动比。这样在车速较低或停车入位时,可减少驾驶员对方向盘的转动量,提高转向灵敏度;而在较高车速时,大的传动比可降低车辆响应对方向盘输入的敏感度,提高行驶稳定性和安全性。
1.2 车辆稳定性控制
主动转向系统可根据车辆稳定性需求,在一定范围内通过改变前轮转角来直接改变前轮横向力,产生一个横摆力矩,相比一般的通过控制轮胎的制动或驱动力的横摆控制更为直接有效。当汽车转弯制动,行驶中遇到侧风、路面附着系数变化较大等扰动时,主动转向系统可以独立于驾驶员进行一定的转向干预,实现车辆的稳定行驶。
1.3 其他功能
利用车辆上集成的各类传感器信息,通过一定的控制算法,主动转向系统还能实现诸如主动避撞、路径辅助保持等一系列的功能;通过集成主动转向系统、横摆控制、主动侧倾控制等系统而建立的底盘综合控制系统,能够更好地提高汽车的舒适性和操纵稳定性[7-9]。
2 主动前轮转向试验台的组成
试验台基于宝马的机械式主动前轮转向系统构建,图1为搭建的试验台实物,图2为试验台的系统架构。由图1和图2可以看出:试验台的机械部分包括试验台支架、主动转向系统、电控液压助力转向系统、模拟力矩反馈系统、执行电机、传感器、轮胎、方向盘、悬架等;电子部分包括工控机、dSPACE板卡、信号处理器、两个执行电机控制驱动器、液压阀控制器等。

主动转向系统主要由永磁无刷直流电机、双行星齿轮机构和涡轮蜗杆等构成;电控液压助力系统由液压泵、油管、压力流量控制阀体、v型传动皮带、储油罐等部件构成;模拟力矩反馈系统主要由力矩电机和减速器组成,通过对齿条施加横向力来模拟路面反馈力;电子控制系统主要包括主动转向控制单元、助力转向控制单元、模拟力矩控制单元、电机控制器、方向盘转角转矩传感器、小齿轮转角传感器、电机位置传感器等。
3 试验台的关键部分分析
3.1 实时仿真控制系统
主动转向试验台中,以dSPACE为控制平台,在Matlab/Simulink下设计主动转向的控制算法,实现主动转向的快速控制原型及硬件在环实时仿真[10]。驾驶员依据DYNAanimation的虚拟场景转动方向盘,dSPACE及各个控制单元获取试验台上的方向盘转角传感器、小齿轮转角传感器及车速传感器等信息,实时运行的车辆模型计算出当前的车速、横摆角速度、侧向加速度、齿条反馈力等,一方面将其传给DYNAanimation模块产生新的虚拟实时视景;另一方面通过dSPACE的DA接口将其传送给相应的控制单元,其中主动转向控制单元根据车速、横摆角速度、侧向加速度实时计算出叠加转角传送给主动转向执行电机控制器,而助力转向控制单元和模拟力矩控制单元则根据相应信息计算并输出相应的指令给电磁阀、模拟力矩电机控制器等,对汽车转向过程中前轮转角量、转向助力和路面反馈力进行调整,最终实现人车路的闭环实时仿真。
3.2 试验台的控制方案
试验台采用横摆角速度反馈控制来实现车辆操纵稳定性控制,通过参考模型获得理想横摆角速度,与实车模型的横摆角速度进行比较,将其偏差送给主动转向控制器计算需要的附加转角,最终通过主动转向执行器实现车轮的叠加转角,图3为横摆角速度反馈控制的原理图。在控制方法方面,可以采用PID控制、滑膜变结构控制、H∞鲁棒性控制等。在系统模型方面,参考模型采用二自由度非线性车辆模型,包括侧向及横摆自由度;实车模型采用车辆动力学软件veDYNA的多自由度非线性车辆模型,利用它的DYNAanimation模块来实现视景实时显示虚拟试验车和道路状况,驾驶员观测虚拟车辆运行状况,通过试验台的方向盘控制虚拟车辆运行,从而实现人车路的闭环实时仿真实验,图4为DYNAanimation的一个试验场景。

3.3 主动转向执行电机及其控制
选用了无刷直流伺服电机,它是利用电子换相技术来代替直流电动机电刷换向的一种新型直流电动机,具有运行效率高、启动转矩大、调速范围广、结构简单运行可靠等优点,具有旋转的磁场和固定的电枢,包括电机本体,转子位置传感器和电子换相线路三大部分,实验中电机采用位置、转速和电流的三闭环控制方式,如图5所示。

图5 直流无刷伺服电机的三闭环控制方框图
3.4 双行星齿轮机构
试验台的双行星齿轮和涡轮蜗杆结构如图6所示,该齿轮机构工作时有3种驱动方式:
(1)伺服电机即涡轮固定不动时,转向盘转角通过主动太阳轮将动力传递给双行星齿轮机构中间的行星架,再由从动太阳轮输出。
(2)转向盘不动,即主动太阳轮固定时,伺服电机通过行星齿轮机构将动力传递给从动太阳轮。
(3)在通常情况下,主动太阳轮和伺服电机是共同工作的,车轮转角是驾驶员转向角和伺服电机转向角的叠加。
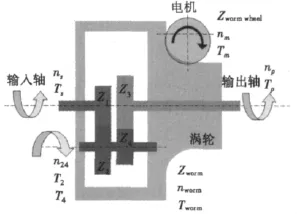
图6 主动转向行星齿轮和涡轮蜗杆结构
4 试验台功能验证试验
针对主动转向系统的功能、电机的控制以及各种控制器,可以在试验台上设计多种类型实验,如变传动比试验、汽车稳定性试验等。基于dSPACE软件开发的Control Desk可以方便的访问dSPACE硬件中所运行的实时程序,可以对采集的信号和模型中的虚拟信号进行实时可视化分析、在线调参等。
4.1 变传动比试验
汽车主动前轮转向系统主要依赖于伺服电机的转动叠加前轮转角,改变方向盘与前轮的传动比,使得驾驶员在低速驾驶时更灵活,高速驾驶时更稳定。
主动转向系统的传动比与车速有关,所以不同车速下,方向盘转角与小齿轮转角的比值也不同,分别设定30 km/h、125 km/h和200 km/h的车速在试验台上进行试验。试验时,在某一车速下转动方向盘,待方向盘转角信号与小齿轮转角信号比值趋于稳定,方向盘转角、小齿轮转角及两者的比值分别如表1所示。

表1 变传动比试验结果
从表1中可以看出:在以上3种车速下,方向盘转角与小齿轮转角的比值大约为0.526、0.792和0.915,小齿轮转角与前轮转角的传动比为20,则主动转向系统总的传动比分别为10.52、15.84、18.3,可以看出转向传动比随车速的增大而增大,从而验证了试验台能够实现主动转向的变传动比功能。
4.2 双移线试验
双移线试验反映了汽车典型工况下的行驶性能,基于ISO3888—1—1999和GBT 6323—1994标准,考虑车速变化时的适应性设定,是评价汽车稳定性的一种试验方法,图7为双移线道路示意图。
图7中参数参考值为:S0=2u,S1=15u/22,S2= 30u/22,S3=S4=25u/22,S5=30u/22,S6=3u,变道距离B=3.5 m,u为车速。
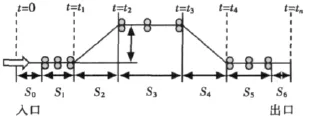
图7 双移线道路示意图
设定试验仿真车速u为120 km/h、道路附着系数为0.85,分别在打开主动前轮转向系统和关闭主动前轮转向系统的情况下进行双移线试验,模型中采用经典的PID控制器对实车的横摆角速度进行控制。试验过程中,在Control Desk下采集试验数据,并在Matlab下作图,则整车的方向盘转角变化和横摆角速度变化分别如图8和图9所示。从图9中可以看出:未加入主动前轮转向系统的横摆角度最大值约为0.29 rad/s,而加入主动前轮转向系统后的横摆角速度最大值约为0.25 rad/s,最大相差了0.06 rad/s,汽车相比较而言会更加稳定。另外,从图8中可以看出:未加入主动前轮转向系统的方向盘转角最大值约为0.52 rad,而加入了主动前轮转向系统的方向盘转角最大值约为0.45 rad,最大相差了0.07 rad,也就是在4°左右,比较符合理论分析,汽车的转向相对轻便。

5 结论
机械式主动前轮转向试验台为进行汽车主动转向的研究提供了更可靠的方法,该试验台以dSPACE为平台进行半实物仿真,实时性好,可靠性高,而且能快速的进行数学建模和在线调参,缩短了试验周期,同时,还可方便的将主动转向系统与横摆控制等系统进行实时联合仿真,扩展性较强,实用性更高。
[1] Willy K,Wolfgang R.Active Front Steering(part 1):Mathematical Modeling and Parameter Estimation[C]//SAE Paper 2004-01-1102,2004.
[2] Wolfgang R,Willy K,Gerd R,etal.Active Front Steering(part2):Safety and Functionality[C]//SAE Paper2004-01-1101,2004.
[3] 高晓杰,余卓平,张立军,等.机械式前轮主动转向系统的原理与应用[J].汽车工程,2006,28(10):918-921.
[4] 余卓平,赵志国,陈慧.主动前轮转向对车辆操纵稳定性能的影响[J].中国机械工程,2005,16(7):652-657.
[5] 陈德玲,殷承良,张建武.基于参数不确定的主动前轮转向鲁棒性控制[J].上海交通大学学报,2008,42(8):1329-1333.
[6] 李强,施国标,林逸等.主动前轮转向控制技术研究现状与展望[J].汽车工程,2009,31(7):629-633.
[7] Zeyada Y,Dean C K,El-ArabiM E,et al.A Combined Active-Steering,Differential-Braking Yaw Rate Control Strategy for Emergency Maneuvers[C]//Detropt:SAE Int Congress and Exposition,1998.
[8] He J J,Crolla D A,Levesley M C,et al.Coordination of Active Steering,Driveline,and Braking for Integrated Vehicle Dynamics Control[J].Proc Instn Mech Engrs:Part D,2006,220(10):1401-1420.
[9] Yang X J,Wang ZC,PengW L.Coordinated Control of AFSand DYC for Vehicle Handling and Stability Based on Optimal Guaranteed Cost Theory[J].Vehicle System Dynamics,2009,47(1):57-79.
[10] 恒润科技.dSPACE-基于Matlab/Simulink平台实时快速原型及硬件在回路仿真的一体化解决途径[Z].北京:恒润科技,2005.
[11] 高峰,周福全.主动前轮转向系统伺服电动机的研究[C]//2009中国汽车工程学会年会论文集.北京:机械工业出版社,2009:1808-1811.
