反辐射无人机抗前沿闪烁诱饵技术
2011-03-21朱学平
陈 鑫,朱学平,彭 杰
(1.电子信息控制重点实验室,成都 610036;2.西北工业大学 航天学院,西安 710072)
1 引 言
目前,越来越多的雷达配备了各种各样的有源诱饵。诱饵通过光缆有线方式接收雷达的基带信号,辐射出与雷达旁瓣功率相当、特征参数一致的诱饵信号,雷达在多个诱饵的配合下工作,使雷达既能够开机工作又能避免反辐射武器的攻击。
有源诱饵诱偏反辐射武器技术的进步,使反辐射无人机的作战效能面临了更大挑战,从而推动了反辐射无人机抗诱偏技术的研究。文献[1]提出采用阵列扩展测向,提高导引头的角度分辨能力,使反辐射导弹可将雷达和诱饵较早地从角度上分辨开,达到抗诱偏的目的。文献[2]分析了反辐射导弹抗诱偏效能的性能参数,得出了减小导引头分辨角是实现反辐射导弹抗点源诱偏的有效途径的结论。文献[3]提出采用窄波束被动雷达导引头或多模复合导引头特别是采用超分辨新体制导引头以提高角分辨力,从而使反辐射导弹具备抗诱偏能力。
采用多模复合制导或其它新体制的反辐射导引头是提高反辐射武器抗诱偏的有效措施。对于采用传统干涉仪测向体制的反辐射导引头减小其角度分辨阈值可以将雷达和诱饵较早分开,然而由于物理条件限制,导引头角度分辨阈值减小毕竟有限。如何在现有反辐射导引头测向体制下提高武器系统的抗诱饵能力,必须从系统的角度对于不同典型诱饵进行相应的对抗策略研究。
从无人机平台的角度讲,在反辐射导引头角度分辨能力一定的条件下,提高无人机的机动性亦可以提高对抗诱饵的能力。本文针对前沿闪烁诱饵,分析了诱饵诱偏反辐射无人机的效果,提出了一种新的变阈值的BTT/STT组合控制抗诱偏措施。仿真结果表明,该方法可以有效对抗前沿闪烁诱饵,同时消除面对称布局无人机BTT控制滚转通道的奇异性问题。
2 前沿闪烁诱饵诱偏反辐射无人机效果分析
前沿闪烁诱饵包括慢闪诱饵和快闪诱饵两类。导引头采用前沿测向可进行正确测向,但测向结果将随诱饵前沿变化而变化,导致命中概率降低。由于诱饵在空间上是可分的,当反辐射无人机接近目标时,导引头测出的不同诱饵目标的夹角增加。可设定合适的角度门限,抛弃超过门限的目标,保持门限内的目标跟踪,从而实现按照信号到达角区分不同辐射信号的目的,可一定程度对抗闪烁诱饵。
图1为反辐射无人机抗前沿闪烁诱饵攻击示意图[4]。假定反辐射无人机攻击方向与雷达和诱饵连线垂直,无人机初始瞄准诱饵,当诱饵和雷达张角达到导引头角度门限值时,无人机开始转弯攻击雷达。其中,O1、O2分别为诱饵和雷达,ΔθR为导引头角度门限值,V为无人机飞行速度,D为无人机和诱饵初始相对距离,r为转弯半径,s为反辐射无人机落地时侧向机动距离,雷达O2和诱饵O1相对距离为L。

图1 反辐射无人机攻击前沿闪烁诱饵示意图Fig.1 Schematic diagram of anti-radiation UAV attacking cutting-edge blinding decoy
假设无人机匀速飞行,转弯圆弧的切线方向为初始速度方向,反辐射无人机的转弯半径为

式中,a为反辐射无人机侧向加速度。
反辐射无人机落地时侧向机动距离为

由图1可得如下关系:
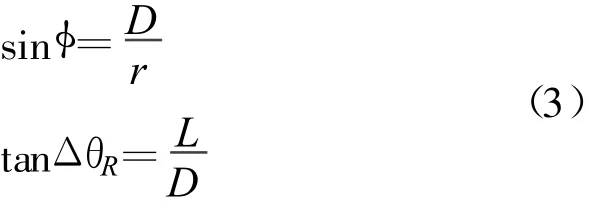
由式(1)~(3)可得,反辐射无人机落地时侧向机动距离O1O′为

反辐射无人机侧向最大加速度amax为

式中,ρ为大气密度,Cz为无人机侧向力系数,Ma为马赫数,α为攻角;βmax为最大可用侧滑角,S为无人机参考面积,m为无人机质量。
将式(5)代入式(4)可得反辐射无人机最大侧向可机动距离为

由分析可知,反辐射无人机侧向最大可机动距离与大气密度(即目标海拔高度)、侧力系数、诱饵布阵间距、导引头分辨角有关,而与飞行速度无关。因此,为了提高无人机抗诱偏能力,从导引头角度讲,必须提高测向精度,减小角度门限,以增加无人机可机动距离;从反辐射武器平台讲,需要提高平台的机动能力。
假设末制导段反辐射无人机飞行速度为250 m/s,反辐射导引头分辨角为7°。对于无人机不同的最大侧向机动加速度amax和诱饵与雷达间距L给出无人机侧向最大可机动距离smax的计算结果,见表1。
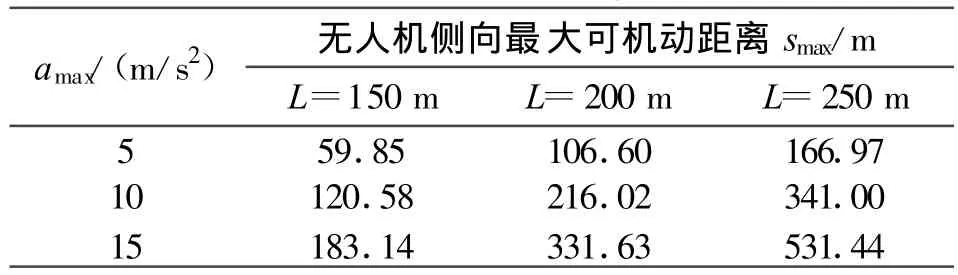
表1 无人机侧向最大可机动距离Table 1 Maximum lateral manuevering distance of UAV
如果无人机侧向最大可机动距离smax小于诱饵和雷达间距L,则诱偏成功。为此,必须提高反辐射无人机的机动性,增强其抗前沿闪烁诱饵的能力。
3 BTT/STT组合控制算法设计
在给定目标海拔高度、诱饵布阵及导引头分辨角的条件下,提高无人机侧力系数对于增加无人机末段可机动距离,提高抗诱饵能力具有重要意义。面对称布局反辐射无人机为了提高飞行控制系统的响应速度,消除滚转指令解算的奇异性问题,末制导段通常采用STT控制;然而,对抗前沿闪烁诱饵对平台的机动能力提出了更高的要求。为此,提出了一种新的变阈值的BTT/STT组合控制算法,以提高反辐射无人机抗前沿闪烁诱饵的能力。
3.1 BTT/STT组合控制算法
首先给出一种BTT/STT组合控制算法:
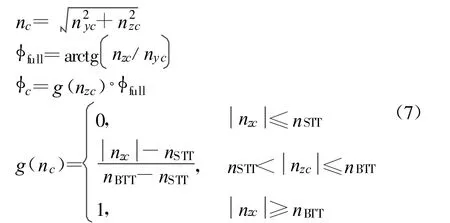
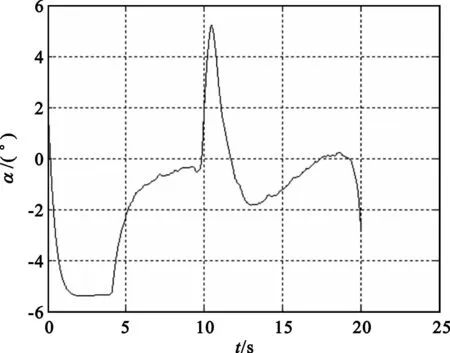
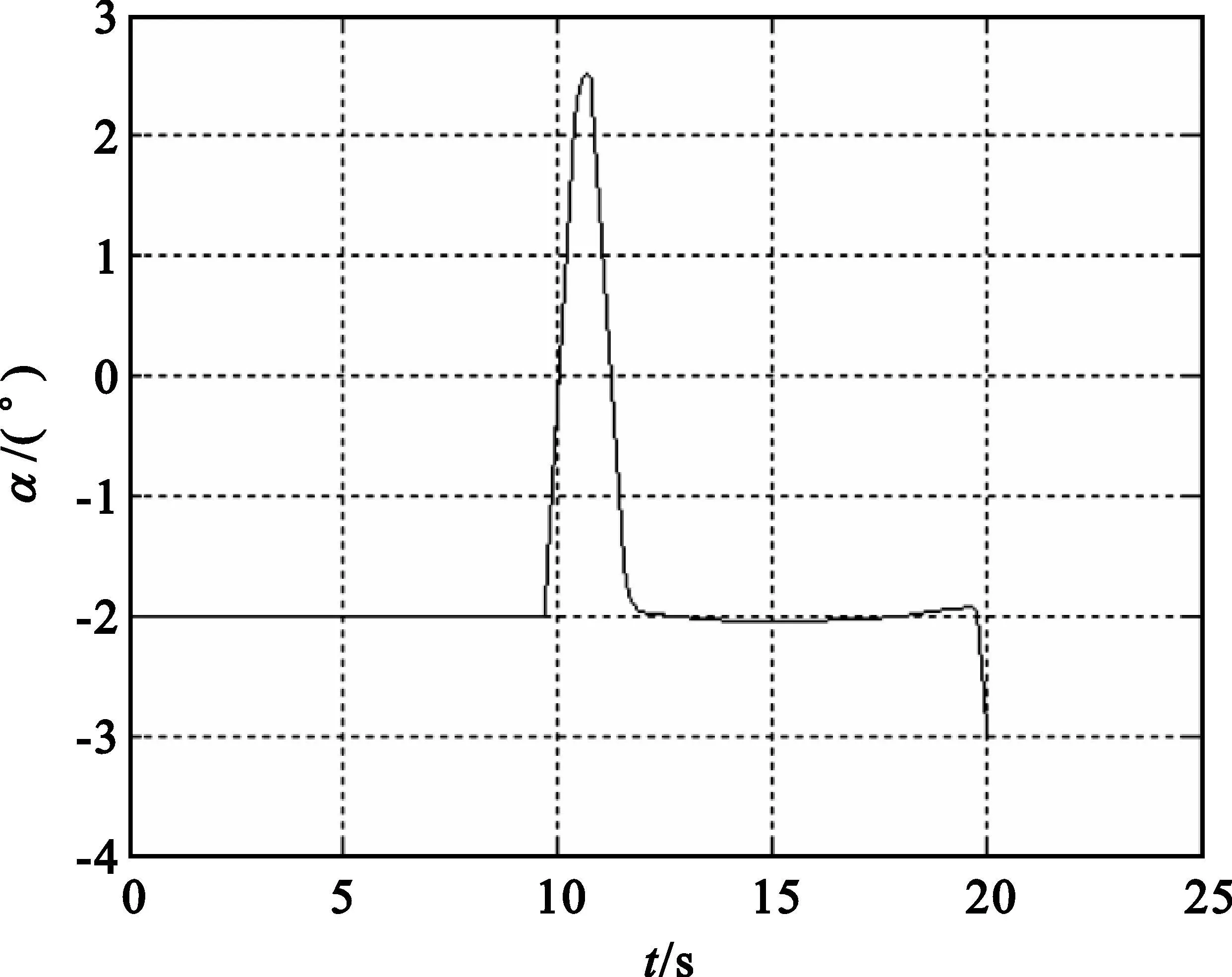
式中,nyc、nzc分别为纵向和侧向过载指令,nc为总过载指令,full为完全BTT滚转角度指令,c为BTT/STT组合控制滚转角度指令,nSTT、nBTT分别为设定的STT控制、BTT控制转换阈值,并且nSTT 因此,BTT/STT组合控制算法增强了面对称布局无人机的侧向机动能力,同时可以使STT/BTT转换过程中倾斜角指令连续变换,消除了BTT控制滚转指令的奇异性问题。 BTT/STT组合控制算法中的阈值nSTT和nBTT可以取成定值,然而这对于对地攻击飞行器的末制导阶段是不适宜的。因为这类飞行器在末制导阶段动压变化范围很大,因此侧向可用过载变化范围较宽。为了改善BTT/STT组合控制在末制导阶段的性能,提出一种变阈值的BTT/STT组合控制算法: 式中,K1、K2为给定的系数 ,且 K1 将式(7)与式(8)相结合即构成了变阈值的BTT/STT组合控制算法。将法向过载指令分配到机体坐标系中,得到机体坐标系下俯仰/偏航通道的法向过载指令为 探究微波烘干时单位面积上要烘干的鱼片的质量对凤尾鱼片感官的影响,单位面积的鱼片的质量不一样,则单位质量的鱼片吸收的微波能量不一样,所以要考虑单位面积的质量对烘干效果的影响。在其他因素不变的条件下,以80,100,120,140 g(以10 dm2烘干面积计)4组质量进行实验,通过分析凤尾鱼片口感的变化,选择适当的烘干质量。 式中,nycm、nzcm分别为机体坐标中俯仰/偏航通道的法向过载指令。 在末制导攻击过程中,反辐射无人机采用变阈值的BTT/STT组合控制,增加无人机的机动性,使得反辐射导引头在空间上分辨出雷达和诱饵之后,无人机具有足够的机动能力攻击雷达或诱饵。 仿真条件为:反辐射无人机初始飞行高度为3000 m,初始坐标为(0 m,3000 m,0 m);目标静止,初始坐标为(2517.6 m,0 m,0 m);目标雷达和诱饵相对距离为250 m,无人机初始瞄准诱饵,飞行速度方向与目标雷达、诱饵连线方向垂直;无人机与目标相对距离为2060 m时(对应的分辨角为7°),分辨出目标雷达和诱饵,开始转弯攻击目标雷达;反辐射无人机脱靶量为2.94 m。图2~4分别为攻角曲线、侧滑角曲线和滚转角曲线。 由仿真曲线可知,侧向过载指令较大时,由攻角及滚转角产生较大的侧向过载;侧向过载指令较小时,滚转角为零,采用STT控制由侧滑角产生侧向过载。因此,采用本文所提出的变阈值的BTT/STT组合控制算法,提高了面对称布局无人机末制导阶段的机动能力同时消除了BTT控制滚转指令解算的奇异性,使得无人机具备抗前沿闪烁诱饵所需的机动能力。 图2 抗诱偏制导攻角曲线Fig.2 Attack angel curve for anti-decoy guidance 图3 抗诱偏制导侧滑角曲线Fig.3 Sideslip angle curve for anti-decoy guidance 图4 抗诱偏制导滚转角曲线Fig.4 Roll angle curve for anti-decoy guidance 本文首先分析了前沿闪烁诱饵诱偏反辐射无人机的效果,给出了对抗前沿闪烁诱饵对无人机平台的性能需求;针对面对称布局无人机侧向机动能力差与抗前沿闪烁诱饵对平台机动能力需求高的矛盾,提出了一种新的变阈值的BTT/STT组合控制策略;最后,进行了数字仿真。仿真结果表明,本文所提出的变阈值的BTT/STT组合控制策略,可以大大提高面对称布局反辐射无人机末制导阶段的侧向机动性,使反辐射导引头分辨出雷达和诱饵后无人机具备攻击雷达或诱饵所需的机动能力,在成功分辨出雷达和诱饵后可以成功摧毁雷达或诱饵,并具有较高的制导精度;同时消除了末制导阶段BTT控制滚转指令解算的奇异性问题,验证了本文所提方法的合理性和可行性。 [1] 刘剑,王丰华,黄知涛,等.阵列扩展用于反辐射导弹抗诱偏的研究[J].系统工程与电子技术,2007,29(3):365-367.LIU Jian,WANG Feng-hua,HUANG Zhi-tao,et al.Aperture extension for anti-decoy in anti-radiation missile[J].System Engineering and Electronics,2007,29(3):365-367.(in Chinese) [2] 李彦志,吴迪军,侯慧群.空地反辐射导弹抗点源诱偏全弹道作战仿真[J].电子信息对抗技术,2008,23(1):32-35.LI Yan-zhi,WU Di-jun,HOU Hui-qun.All-Trajectory Warfare Simulation on Air-to-Ground Anti-Radiation Missile Against Point Sources Bait[J].Electronic Information Warfare Technology,2008,23(1):32-35.(in Chinese) [3] 司锡才,崔冬槐,司伟建.反辐射导弹对抗低截获概率雷达和诱饵技术[J].系统工程与电子技术,2005,27(9):1549-1552.SI Xi-cai,CUI Dong-huai,SI Wei-jian.Technology of AR M contradict LIP radar and bait[J].System Engineering and Electronics,2005,27(9):1549-1552.(in Chinese) [4] 张乐平,朱振波,俞志强.等功率非相干两点源诱偏反辐射无人机研究[J].电子对抗技术,2003,18(1):21-23.ZHANG Le-ping,ZHU Zhen-bo,YU Zhi-qiang.Analysis of the Incoherent Dual Point-Source with Equal Power to Decoy Anti-Radiation UAV[J].Electronic Warfare Technology,2003,18(1):21-23.(in Chinese)3.2 变阈值的BTT/STT组合控制算法


4 抗前沿闪烁诱饵仿真分析

5 结 论