IRAF软件中DAOPHOT包的应用*
2011-01-25郭迪福
张 艳,林 众,郭迪福
(1.暨南大学计算机科学系,广东 广州 510632;2.暨南大学中法天体测量、动力学与空间科学联合实验室,广东 广州 510632;3.山东大学威海分校空间科学与物理学院,山东威海 264209;4.广东省高等学校光电信息与传感技术重点实验室(暨南大学),广东 广州 510632)
天体测量通常关心的是星像的位置,而较少考虑星像的亮度。对于天然卫星的互掩互食观测,利用测光结果能够更准确地进行天体测量[1]。
山东大学威海天文台1 m望远镜于2007年落成,2009年安装了PI公司生产的CCD。文[2]检验了它高精度的位置测量特性,结果表明,使用Platais的自行星表[3]和UCAC3星表[4]进行最终归算后,单次测量精度(标准差)几乎相同,最好的单次观测精度为4~5 mas。平均而言,赤经、赤纬方向的单次观测精度均优于8 mas。为了检验其高精度的测光特性,对文[2]的观测资料用IRAF软件中的DAOPHOT包进行星像测光。
文章第1部分是DAOPHOT包的主要功能及其算法简介。第2部分是用DAOPHOT包进行星像测光及定位的具体步骤。第3部分是资料分析和归算及结果。第4部分是总结和结论。
1 DAOPHOT包简介
IRAF(Image Reduction and Analysis Facility)是美国国家光学天文台开发的天文图像处理和分析软件,广泛用于测光、光谱分析等领域。它基于Linux平台,以C语言编译开发。IRAF中的DAOPHOT包是针对密集场测光设计的,能达到较高的精度。DAOPHOT包主要有寻星、孔径测光、建立点扩散函数以及光度拟合等功能。
1.1 寻星
寻星的任务主要包括以下几点:探测并定位图像中的星像;将合理的恒星图像从随机噪声峰值、星系或其他天体图像、探测器上受带电粒子产生的数据(如宇宙射线、放射性衰变产物)及有外观缺陷的星像中区分出来等。
DAOPHOT的寻星程序FIND扫描图像的每个像素,将该像素的灰度与其周围像素的灰度进行高斯拟合。搜寻并初步定位一些灰度值较大的像素,这些像素代表了实际星像。如果星像中心在这些像素中,那么会有较好的高斯拟合模型,并且模型的中心高度与星像的亮度成正比[5]。高斯模板与图像做卷积后,星系轮廓的高度和天空背景得到了抑制,双星轮廓也可以分开。为了区分饱和星以及宇宙射线,根据Stetson提出的理论[6],再计算锐度和圆度来识别星像。
(1)锐度是最优拟合高斯函数的中心点与其周围像素灰度平均值的强度之比,可用来剔除宇宙射线。宇宙射线或其他窄轮廓的亮度大部分分布在中心像素上,因此其锐度值大于1;而对于正常的星像来说,锐度值范围是0.2到1之间。DAOPHOT中锐度的计算公式如下:

式中,Di0,j0表示卷积区域的局部最大值;(i0,j0)是其坐标; 〈Di,j〉表示周围像素灰度平均值;Hi0,j0是最优拟合的高斯函数的高度。(i,j)靠近(i0,j0)但不等于(i0,j0)。
(2)圆度是星像在x方向和y方向的流量分布对比,可用来剔除坏像素,正常的星像在各个方向上的流量是基本对称的,圆度值是-2到2之间的数。圆度表示为:

式中,hx和hy分别表示x方向和y方向一维高斯函数拟合值的高度。
1.2 孔径测光
在密集场进行孔径测光,主要是为了获取合适的亮度初值以便进行光度拟合。测量CCD图像中星像的亮度,需要把该星像轮廓上所有光强累加起来并转换为星等。求和通常在一个圆形区域内进行,所以该技术被称为孔径测光。孔径测光过程一般分为以下4个步骤[6]:星像定心、确定天空背景、计算初始星等和孔径校正。
天空背景通过分析星像周边圆环状对称区域内像素的灰度值确定。圆环内应包含尽量多的像素,而且必须远离星像的中心,这样可以保证天空区域的随机散射不会增加测量的不确定性。在实际测量时一般外环半径的取值是内环半径的2倍。有了圆形区域中各像素的亮度值,天空背景就近似等于这组数据的众数(mode)。
1.3 建立点扩散函数
点扩散函数一般是光强(灰度值)随着星像中心距离变化的函数,它反映了大气宁静度、图像抖动以及望远镜跟踪误差等的综合效应。一颗恒星的星像轮廓基本是仪器点扩散函数、大气扰动以及跟踪误差综合的结果。
为了在密集星场测光,必须建立一个准确的星像点扩散函数模型[5],Stetson将点扩散视为由高斯模型和查找表构成[6]。DAOPHOT中建立点扩散函数的程序是PSF。该程序对亮星的中心区域建立一个二元高斯函数,将该函数对星像范围内每个像素所占的面积进行积分,将积分结果与该像素观测流量做差,从而建立起点扩散函数:
式中,Di,j表示(i,j)像素的灰度值;sky是天空背景;H表示局部区域中星像中心亮度的估计值;(x0,y0)是星像中心;(i,j)靠近(i0,j0)。
1.4 光度拟合
由DAOPHOT中的FIND、PHOT、PSF程序分别可以得到星像的初始中心位置、初始星等、天空背景以及点扩散函数,于是用1.3节得到的点扩散函数拟合星像的光度。密集场中的星数量较多,靠得太近的星会互相影响。Stetson先将星像分组,与此同时进行光度拟合。DAOPHOT中分组的程序是GROUP,根据星的初始星像位置与参考星的距离将星像分组并予以标记,通常将距离小于拟合半径的星分在同一组,直到所有的星都被作为参考星进行遍历后,分组结束。
有些组可能包含了几百颗星,这些星太过拥挤会影响测光效果。DAOPHOT中的程序会将这些星隔离开,重新分组,直到每个组中只包含较少的星数。真正进行光度拟合的程序是NSTAR,它对每个分组将真实的图像数据减去平移和缩放后的点扩散函数模型,得到残差。该残差由天空背景、随机噪声以及不合适的点扩散函数参数组成。用最小二乘拟合(5)式使得残差达到最小,调整点扩散函数的参数并计算出最终的星等。

式中,Δi,j表示减去初始模型后第i行第j列像素处的残差;Pk表示第k颗星的点扩散函数模型,此模型是经过位置平移和亮度缩放后的模型;Δx0,k表示第k颗星中星像中心在x方向上的偏差;Δy0,k表示第k颗星中星像中心在y方向上的偏差;Δh0,k表示第k颗星的亮度缩放因子的修正量;n表示该分组中星的数量。
2 DAOPHOT包测光具体步骤
IRAF是基于Linux平台的软件,因此必须用命令执行软件对观测图像进行处理。使用DAOPHOT包进行测光主要有启动软件包、参数设置、寻星、孔径测光、求PSF、分组、光度拟合、数据存储等步骤。
2.1 启动 IRAF
首先,打开Linux终端命令窗口。依次键入命令进入IRAF操作系统。具体操作步骤如图1。
在后续过程中,可以通过命令使看图测量窗口中显示将要测量的图片,以便放弃质量较差的图片。其中,&表示将任务提交到Linux后台执行。
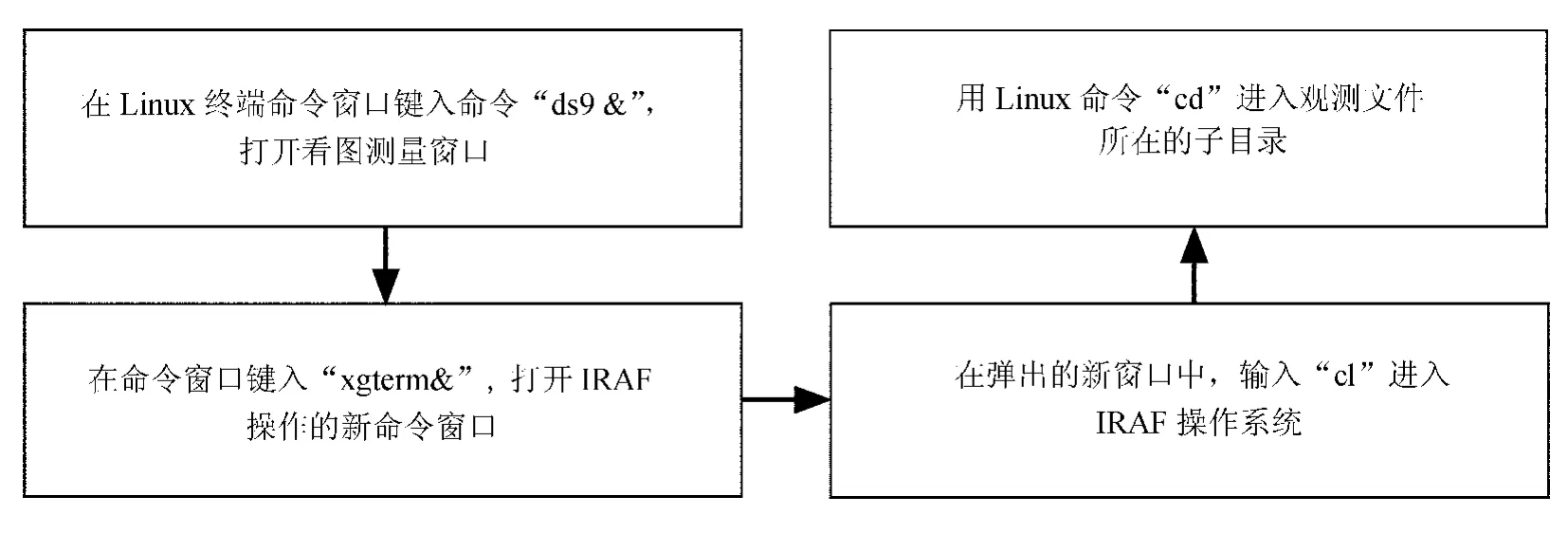
图1 启动IRAFFig.1 Steps of initiating IRAF
2.2 显示观测图片
display是IRAF的带参数显示程序,在窗口“xgterm”中键入“display<文件名>.fit/fits”查看拍摄的图片,丢弃质量较差的图片。调用IRAF的编辑命令epar可修改其参数。若直接键入“display<文件名>.fit 1”,便不会出现修改frame的询问。
参数修改完后用<shift>+“:”切换至命令提示符 “:”下,在此提示符下可用“wq”命令保存修改并退出。若需要查看观测图片的文件头,则在cl提示符下键入“imhead<文件名>.fit/fits”。
2.3 参数准备
运行ccdred包中的imexame程序,在所显示的指定图像中,用鼠标圆圈套住目标星或标准星,按下“A”键,取终端窗口内enclosed、rooffat、direct 3个参数值较接近的几组中的direct参数值的平均值作为FWHM(半高全宽)值[7];在图像中的无星区域点击鼠标左键,再按下“M”键,取终端窗口内几个stddev的平均值作为sigma的值并记录[7]。
2.4 自动寻星
寻星的步骤如图2。findpar程序和daofind程序的参数对后续工作没有太显著的影响,一般保留默认值。若图像是在ds9中第1帧打开的,结果自动保存到对应的<文件名>.coo.1中。
2.5 孔径测光
孔径测光步骤如图3。datapar程序中fwhmpsf是点扩散函数的半高全宽,近似等于FWHM;sigma是测量背景计数标准偏差,取stddev的平均值;readnoi是 CCD读出噪声;epadu是CCD增益;obstime是观测时间;itime是曝光时间,它们记录于观测文件头中。这些参数将根据具体拍摄的图片做修改。

图2 寻星步骤Fig.2 Steps of finding stars
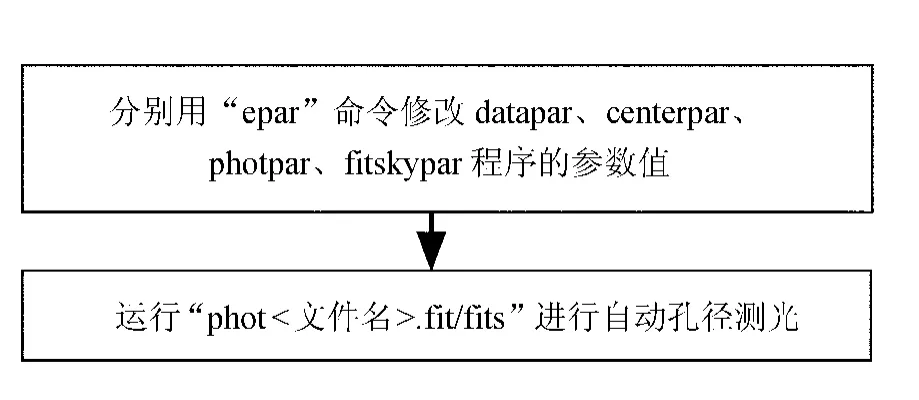
图3 孔径测光步骤Fig.3 Steps of aperture photometry
centerpar程序的cbox是定星盒的宽度,其值取2倍半高全宽与5像素中较大者。
photpar程序的apertur(孔径)的值为1倍半高全宽与3像素中较大者。
fitskypar程序中的annulus是观测内径,一般取4倍半高全宽,dannulu是观测内外径之差,取2.5倍半高全宽与4倍半高全宽之间的一个值。测光的结果自动保存到对应的<文件名>.mag.1中。
2.6 求解 PSF
求解PSF步骤如图4。在建立PSF时,psfrad是点扩散函数的最大半径,即在以此为半径的圆内建立点扩散函数,一般取4倍半高全宽加1的值与11像素中较大值;fitrad指点扩散函数的拟合半径,即在以此为半径的圆形区域内做最小二乘拟合,取1倍半高全宽与3像素中较大的值,其余参数保留默认值。

图4 求PSF步骤Fig.4 Procedure to derive PSF
2.7 分组
在xgterm窗口中键入“group<文件名>.fit/fits”,根据位置和信噪比信息将星像分组,其中psfrad(psf的最大半径)取4倍半高全宽加1,fitrad(psf的拟合半径)取1倍半高全宽与3像素中的较大值,其余参数保留默认值。
2.8 光度拟合
运行“nstar<文件名>.fit/fits”拟合星像预定义组的PSF,其中psfrad取4倍半高全宽加1与11像素中的较大值,fitrad取1倍半高全宽与3像素中的较大值,其余参数保留默认值。
2.9 数据读出和存放
修改txdump程序的参数值。textfile表示输入观测结果文件名,fields是输出字段,其他参数保留默认值。保存并退出至daophot提示符下。
若目标图像是第一次被测量,用命令 “txdump<源文件名>.fit/fits.nst.1><目标文件名>.txt”将星像亮度和位置信息存入目标文件。
3 实例说明
3.1 仪器和观测资料
2009年10月7日晚使用山东大学威海天文台(东经122°02'59″,北纬37°32'09″,海拔100 m)1 m望远镜进行观测。表1列出了望远镜和CCD的参数说明,详细参数见文[2]。
表2列出了观测到的CCD图像的情况,其中状态“1”表示CCD在正常取向(x轴大体沿赤经方向,y轴大体沿赤纬方向),状态“2”表示绕光轴转动约90°的情况。
3.2 图像
图5是一帧CCD在状态1时观测的典型图像。其中有少数几颗星出现了饱和。视场中星像密集,星像半高全宽(FWHM)约为4个像素。
3.3 测量结果与数据归算
利用第2节中介绍的步骤测量每幅CCD图像中星像的量度坐标和光度,部分测量结果如表3,其中X、Y是星像位置,mag是仪器星等值,零点值(zpt)是25。

表1 威海天文台1米望远镜和CCD的参数说明Table 1 Parameters of the 1 m telescope of the Weihai observatory and the mounted CCD

表2 CCD图像的说明Table 2 Specifications of the CCD image
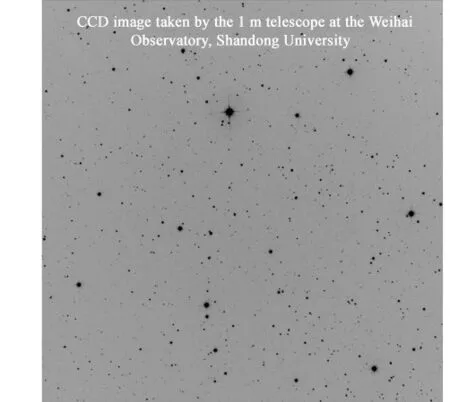
图5 一幅典型的CCD图像Fig.5 A typical CCD image

表3 部分测量结果Table 3 Some measurement results
采用文[8]中开发的软件,依量度坐标和光度与星表中已知星像进行匹配,每一视场中能匹配约330颗UCAC3星表星。
剔除一幅图像中饱和的星,在该图中找出n颗较亮的星,将这n颗星的通量和的平均fluxavg作为参考量,假设该图中第j颗星测得的星等为mj。再利用公式(6)计算星等差:

式中,fj表示第j颗星的通量。最后在多幅图像中统计星等差的平均值及标准差 σj,用 σj衡量测量的内部精度。结果表明:在使用相同的星建立点扩散函数的情况下,对于比较稀疏区域的亮星内部精度达到0.003 mag,而对于较密集的区域的暗星内部精度达到0.0128 mag(如图6,横坐标表示仪器星等,纵坐标是星等的内部精度)。
4 总结和结论
本文详细介绍了IRAF软件中的DAOPHOT包的原理及其使用方法,并用威海天文台1 m望远镜观测M39星团,对观测数据进行测光归算。数据归算结果表明,在UCAC3星表中匹配到的星,稀疏区域亮星的星等内部精度达到0.003 mag,较密集区域的暗星内部精度约为0.0128 mag。
IRAF软件的功能庞大,使用起来较复杂,其中的一些原理和参数设置还需仔细研究。另外,本文进行的是相对测光的工作,在绝对测光方面还有待继续深入研究。

图6 星等内部精度Fig.6 Internal precisions of measured magnitudes
[1]曾开华,彭青玉.高精度孔径测光注释 [J].天文研究与技术——国家天文台台刊,2010,7(2):124-131.Zeng Kaihua,Peng Qingyu.Notes on High Precision Aperture Photometry of Stars [J].Astronomical Research & Technolog——Publications of National Astronomical Observatories of China,2010,7(2):124-131.
[2]林众,彭青玉,张庆丰.威海天文台1米望远镜天体测量试验 [J].空间科学学报,2011,31(3):344-349.Lin Zhong,Peng Qingyu,Zhang Qingfeng.An Astrometric Experiment for the 1 m Telescope at Weihai Observatory [J].Chinese Journal of Space Science,2011,31(3):344-349.
[3]Platais I.Catalogue of Proper Motions,UBV-photometry and Spectral Classification in the Region of NGC7092(M39) [J].Bulletin Information Center Donnees Stellaries,1994,44:9-15.
[4]Zacharias N,Finch C,Gitard T,et al.The Third US Naval Observatory CCD Astrograph Catalog(UCAC3) [J].The Astronomical Journal,2010,139(6):2184-2199.
[5]Da Costa G S.Basic Photometry Techniques[C]//Steve B Howell.Astronomical CCD Observing and Reduction Techniques.Astronomical Society of the Pacific,1999,23:317-328.
[6]Stetson P B.DAOPHOT:a Computer Program for Crowded-field Stellar Photometry [J].Publications Astronomical Society of the Pacific,1987,99:191-222.
[7]苏云宝,郭永国,张雄.利用IRAF进行CCD测光 [J].云南师范大学学报:自然科学版,2009,29(6):1-4.Su Yunbao,Guo Yongguo,Zhang Xiong.CCD Photometry with IRAF [J].Journal of Yunnan Normal University:Natural Sciences Edition,2009,29(6):1-4.
[8]任俊杰,彭青玉.两种快速星像匹配算法的比较 [J].天文研究与技术——国家天文台台刊,2010,7(2):115-123.Ren Junjie,Peng Qingyu.Comparison of Two Fast Object Matching Algorithms [J].Astronomical Research & Technolog——Publications of National Astronomical Observatories of China,2010,7(2):115-123.
