机载防撞系统垂直防撞的物理模型*
2010-09-26彭良福1林云松
彭良福1,林云松
(1.西南民族大学 电气信息工程学院,成都 610041;2.电子科技大学 自动化工程学院,成都 610054)
自从1981年美国联邦航空局(FAA)提出并着手研制机载防撞系统(Traffic alert Collision Avoidance System,TCAS)以来,经过二十多年的发展,从只能提供交通咨询(TA)的第一代机载防撞系统TCASⅠ,到既能提供交通咨询又能提供垂直方向决策咨询(VRA)的第二代机载防撞系统TCASⅡ,机载防撞系统逐步在美国、欧洲和中国得到了广泛的应用[1-5]。迄今为止,只有少数几家公司能够制造机载防撞系统。因此,建立和分析机载防撞系统的物理模型,对于研究和了解机载防撞系统的防撞机制,具有重要的理论意义和工程参考价值。
1 防撞措施
用于避免飞机在空中相撞的机动措施有转向(水平机动)、变速(水平机动)和升降(垂直机动)3种,这3种机动措施可以单独或者组合使用。受飞机飞行性能的限制,客机和运输机一般采用垂直机动来避免碰撞,战斗机采用垂直机动和水平机动的组合来避免碰撞。限于篇幅,本文只针对飞机垂直机动的防撞模型予以讨论。
为了满足工程应用中的实时性要求,节省机载计算机的运算时间,美国航空无线电技术委员会(RTCA)在DO-185A标准中规定了飞机避免碰撞的垂直机动及垂直方向上的目的速度分别为[6]:
飞机通过加速爬升或者加速下降的方式达到垂直方向上的目的速度,将导致在垂直方向上产生足够大的间隔距离,从而避免与入侵飞机相撞。
2 垂直防撞的物理模型

2.1 模型描述
基于两架飞机之间的相对距离、相对距离的变化率以及相对高度和相对高度的变化率,就可以根据飞机在空中的相对几何位置,预测和计算出两架飞机到达最接近点的垂直间隔距离(Vertical Miss Distance,VMD)和水平间隔距离(Horizontal Miss Distance,HMD)[6-7]。如果预测的在最接近点的垂直间隔距离小于RTCA/DO-185A 标准规定的飞机垂直安全间隔距离门限值VMDmin,并且水平间隔距离也小于规定的飞机侧向安全间隔距离门限值HMDmin,那么飞机就可能会发生碰撞。在飞机可能相撞的情况下,如何在上述4种垂直机动中选择合理的防撞措施,是机载防撞系统需要解决的关键问题。为了解决该问题,我们给出了机载防撞系统的两种垂直防撞的物理模型。

根据图1所示的物理模型,我们可以预测和计算出本机和入侵飞机在最接近点的垂直间隔距离值,该值也是经过τ时间后两架飞机在垂直方向上的投影高度之差。
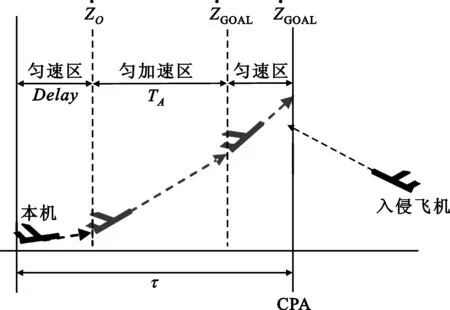
图1 垂直防撞物理模型之一
由图1可知,预测和计算本机和入侵飞机在垂直方向上的投影高度分为3个区域:
(1)延迟区:本机在垂直方向上以当前的垂直速度匀速飞行。飞行员从接收到垂直决策咨询信息到执行垂直机动的防撞措施之间存在一定的时间延迟,称为响应时间Delay。对于标称升降,Delay=2.5 s;对于增大升降,Delay=5 s;
经过τ时间后,本机达到的垂直高度为

(1)

经过τ时间后,入侵飞机达到的垂直高度为
(2)

ΔZ=ZOWN-ZINT
(3)
(1)延迟区:本机以当前的垂直速度匀速飞行,由于飞行员的响应会导致2.5~5 s的时间延迟;


图2 垂直防撞物理模型之二
由图2可知,经过τ时间后,本机达到的垂直高度为

(4)

本机与入侵飞机在τ时间后的高度差为
(5)
将以上两种物理模型计算出的本机与入侵飞机之间的垂直间隔距离值进行比较,取其中的最小值即为预测的两机之间的最小垂直间隔距离ΔZmin:
ΔZmin=Minimum(ΔZ,ΔZ′)
(6)
2.2 仿真分析
根据本文给出的机载防撞系统垂直防撞的两种物理模型以及由该模型导出的计算公式,可以预测和计算采取垂直机动措施后本机与入侵飞机之间的垂直间隔距离值。根据本文给出的垂直防撞模型,我们设计了相应的计算机程序,对文献[6]中提供的本机与入侵飞机相遇的几十种情况进行了计算机模拟,模拟结果与RTCA/DO185A标准提供的输出文件一致。限于篇幅,本文中仅给出一个模拟示例,示例中两架飞机的相遇情形假定为:本机的初始高度为707 m,初始高度率为0 m/s;入侵飞机的初始高度为768 m,初始高度率为+6.1 m/s;本机的标称加速度Accel=2.4 m/s2,目的垂直速度为±7.6 m/s,响应时间Delay=2.5 s;本机的增大加速度Accel=3.4 m/s2,目的垂直速度为±12.7 m/s,响应时间Delay=5.0 s;本机与入侵飞机到达最接近点的预留时间τ=25 s。图3给出了根据垂直防撞模型预测的本机在垂直方向采取机动飞行措施后,本机和入侵飞机的垂直高度随时间的变化曲线。

图3 垂直高度随时间变化的预测曲线
表1给出了根据垂直防撞模型预测的本机采取垂直机动措施后,本机与入侵飞机之间的最小垂直间隔距离值。由表1可知,在模拟示例中两架飞机相遇的情形下,为了避免碰撞,本机下降比本机爬升将会产生更大的垂直间隔距离,并且本机不论以-7.6 m/s还是以-12.7 m/s作为目的垂直速度,都能够产生安全的垂直间隔距离。
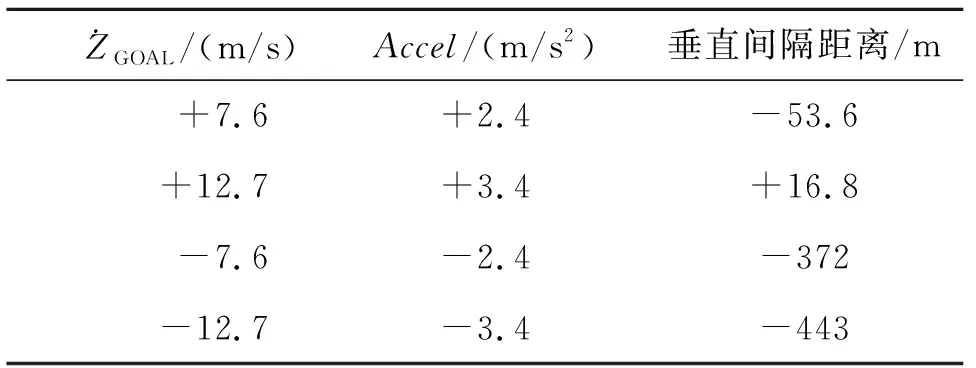
表1 最小垂直间隔距离的预测值
3 垂直防撞措施的选择及处理逻辑
根据上述两种垂直防撞模型和计算公式,我们可以得到本机选择垂直机动 (垂直决策咨询)的处理流程。垂直防撞决策主要有以下几个步骤:
(1)首先对入侵飞机进行监视和跟踪,同时进行碰撞威胁的探测。根据两架飞机之间的相对距离和相对距离变化率计算出到最接近点的预留时间τ、水平间隔距离HMD和垂直间隔距离VMD。如果预测的两机在最接近点的水平间隔距离小于水平间隔距离的安全门限值HMDmin,并且垂直间隔距离小于垂直间隔距离的安全门限值VMDmin,那么就需要进行垂直机动措施的选择,进入步骤2;否则继续进行碰撞威胁的探测;


(4)显示和输出垂直防撞机动措施的垂直决策咨询(VRA)信息。
4 结束语
如何准确预测和计算本机采取机动飞行措施后本机与入侵飞机在最接近点将产生的最小垂直间隔距离值,是机载防撞系统实现防撞功能的关键[8-9]。如何建立准确描述两架飞机之间的空中几何形态的物理模型是设计机载防撞系统防撞算法的核心。本文给出的机载防撞系统垂直防撞的物理模型,能够正确预测和计算本机采取垂直机动的防撞措施后两机在最接近点产生的垂直间隔距离,在理论上为本机选择正确的垂直防撞机动措施提供了决策依据,同时也有助于从事机载防撞系统国产化的科技人员掌握TCAS的防撞原理和进行相关的软件开发。
5 致谢
感谢项目组的李琦同志在机载防撞系统防撞机制的计算机仿真方面提供的帮助。
参考文献:
[1] Williamson T, Spencer N A. Development and Operation of the Traffic Alert and Collision Avoidance System(TCAS)[J].Proceedings of the IEEE,1989,77(11):1735-1744.
[2] 周其焕. 交通警戒和避撞系统的技术特点和发展现状[J].航空电子技术, 1999, 30(2):10-16.
ZHOU Qi-huan. The technical characteristic and development and present situation of the traffic alert and collision avoidance system[J]. Avionics Technology, 1999, 30(2):10-16. (in Chinese)
[3] Kelly W E. Conflict detection and alerting for separation assurance systems[C]//Proceedings of 18th Digital Avionics System Conference.Louis, Missouri:[s.n.],1999:35-44.
[4] Shirakawa M, Sumiya Y, Ozeki S. A numerical evaluation method of the revised ACAS algorithms using smoothed spline interpolation[C]//Proceedings of 2000 IEEE Aerospace Conference.Big Sky,MT,USA:IEEE,2000:539-545.
[5] 林云松,彭良福,童玲. 空中防撞系统避撞机制的数学模型[J]. 电子科技大学学报, 2008, 37(4):552-555.
LIN Yun-song, PENG Liang-fu, TONG Ling. Mathematics model for collision avoidance in traffic alert and collision avoidance system[J]. Journal of University of Electronic Science and Technology of China, 2008, 37(4):552-555 (in Chinese)
[6] RTCA/DO-185A, Minimum operational performance standards for traffic alert and collision avoidance systems Ⅱ(TCASⅡ) airborne equipment[S].
[7] Abdul-Baki B,Baldwin J, Rudel M-P. Independent validation and verification of the TCASⅡ collision avoidance subsystem[J]. IEEE Aerospace and Electronic Systems Magazine, 2000, 15(8):3-9.
[8] Kuchar J K,Yang L C. A Review of Conflict Detection and Resolution Modeling Methods[J]. IEEE Transactions on Intelligent Transportation Systems,2000,1(4):179-189.
[9] Ennis R L, Zhao Y J. Defining appropriate inter-aircraft separation requirements[C]//Proceedings of AIAA 4th Aviation Technology, Integration and Operations (ATIO) Forum. Chicago, Illinois:AIAA,2004:1-12.
