基于改进型BP神经网络的无刷直流电机调速系统的应用研究
2010-09-25付丽辉
付丽辉
(淮阴工学院 电子与电气工程学院,江苏 淮安 223003)
0 引言
近年来,随着电力电子器件及新型永磁材料的发展,无刷直流电机( brushless direct current motor,BLDCM)迅速成熟为一种机电一体化电机,它具有控制容易、无换向器、结构简单、运行稳定、效率高, 可靠性好、使用寿命长等优点[1],在高性能的中、小伺服驱动领域中,也获得广泛应用并日趋占据主导地位。
无刷直流电动机控制系统通常是通过转子位置传感器获取转子位置信号,从而实现换相,通过转速传感器获取转速反馈信号,并实现转速环的闭环控制[2],这种转速环的闭环控制一般采用转速、电流双闭环数字串级控制来实现的,其外环为速度环, 内环为电流环。具体原理如图1所示。
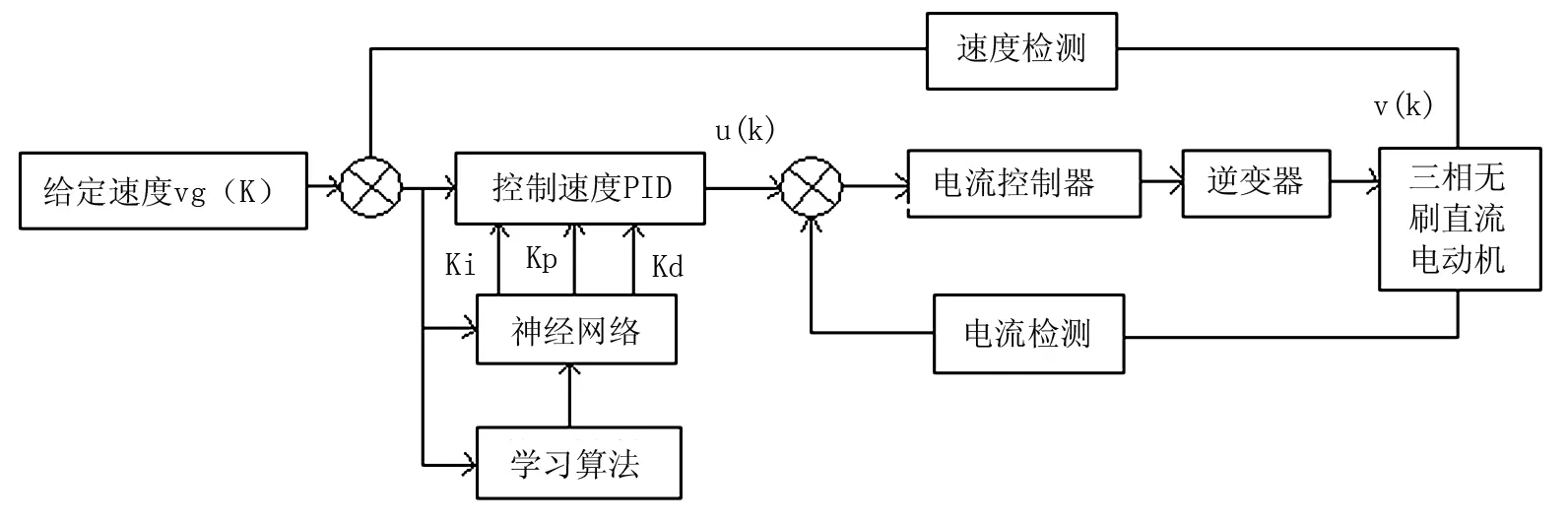
图1 无刷直流电机调速系统框图
图1中的给定速度值为控制要求设定的稳定运行速度, 系统在由速度检测部份检测出电机速度的反馈值后,将其与给定的转速比较,然后经过传统的增量式限幅PID调节, 将输出值作为电流环给定值,该值再与电流检测部分采样得到的母线电流值进行比较, 然后采用PI增量调节方式, 实时调节PWM 占空比,改变施加于电机上的电压, 达到电机调速的目的。为了防止电机中的绕组电流过大,需要设置一个PWM占空比的最大值。
由于无刷直流电机本身存在的非线性问题[1],如电枢反应的非线性、随负载和工况而变化的转动惯量以及负载扰动、电阻变化等,若采用传统PID调节器来控制,虽然其控制稳定,结构简单,但当电机的参数发生变化或受非线性因素影响而发生变化时,其PID参数不能随之而变化,因此,无法满足高精度,高性能的要求,而如果采取神经网络的PID控制,则不需要建立对象的数学模型,并且能够很好地克服系统中参数的变化和非线性等不确定因素,具有较强的鲁棒性,本文将神经网络和传统的PID控制结合起来,并对其中的BP神经网络进行改进,实验表明,该种方法可以获得很好的控制效果。
1 基于神经网络直流无刷电动机调速系统结构
改进的基于粒子群算法的BP神经网络的无刷直流电机调速控制系统框图如图2所示:
图2 BP神经网络无刷直流电机调速系统框图
神经网络本身就是要寻找的非线性映射, 即根据某种优化方法, 利用神经网络的学习功能, 寻找观测到的系统的输入输出数据之间的内在映射关系, 训练结束后,系统的特性就存储于网络内部的各个权系数上,在图2的系统框图中,由学习算法来控制BP神经网络的学习过程,其输出状态则对应于PID 控制器的3个参数Kp,Ki,Kd(比例,积分,微分系数),通过神经网络的自身学习、加权系数调整等方法,使其稳定状态对应于某种最优控制下的PID控制器参数,神经网络通过在线调整权系数来实现对Kp,Ki,Kd的实时调整,经PID调节后,将其输出值作为电流环给定值。该值与采样电流值比较,经逆变,从而调节输出PWM 占空比,实现了对电机调速的目的。
2 基于神经网络直流无刷电动机调速系统的计算方法
由上可知,在利用PID控制器的输出来调节无刷直流电动机的转速的过程中,有一个可以用来调整PID控制器的Kp,Ki,Kd输出的神经网络的学习算法,该算法在整个控制过程中,起到了至关重要的作用,下面即介绍一下由神经网络PID控制的调速过程的流程,具体如图3所示:

图3 神经网络PID调速控制流程图
在图3所述的控制算法流程中,主要包括以下两个方面:
2.1 常规的PID控制算法
常规的PID算法有位置式和增量式,由于前者的控制需要以前所有次的偏差才能计算下一次的控制输出,而后者只要前2次的偏差即可计算下次的控制输出,因此,文中的PID算法的输出u(k)采用增量式控制算法,即:
e(k)=v(k)-vg(k)
de(k)/dt=e(k)-e(k-1)
u(k)=u(k-1)+Δu(k-1)=u(k-1)+Kp.[e(k)-e(k-1)]+Ki.e(k)+Kd.[(e(k)-2e(k-1)+e(k-2))
(1)
其中Kp,Ki,Kd分别为比例,积分,微分系数。
2.2 神经网络及其算法
初始化部分包括需给出各层权系数的初值,以及学习速率和惯性系数
根据BP神经网络的学习算法来在线控制PID的参数,使得性能最优,设计中神经网络选用三层网络,其中,输入层的神经元个数为2个,分别为e(k),de(k)/dt,输出层神经元个数为3个,分别为控制参数Kp,Ki,Kd,根据系统的规模,选用隐含层的神经元个数为8个,而输出层神经元一般选用非负的sigmoid函数。主要算法描述如下:
2.2.1 隐层及输出层神经元输出算法
文中所采用的为一个三层的BP网,在正向得到输出层神经元的输出时主要采用如下算法[3]:
(2)
其中,xj为第j个隐节点的输出,pi是第i个输入,vij为第i个输入到j个隐节点的连接权,r为输入节点的个数,k为隐节点的个数,θj为第j个隐节点的阈值,f(x)为隐节点的激活函数,为Sigmoidal型函数。
(3)
其中,yl为第l个输出节点的输出,xj为第j个隐节点的输出,wjl为第j个隐节点到l个输出节点的连接权,n为输出节点的个数,k为隐节点的个数,θl为第l个输出节点的阈值,f(x)为输出节点的激活函数,即:Sigmoidal型函数。
2.2.2 利用改进的粒子群算法来调整连接权时的算法
针对标准BP算法一般存的训练时间长,学习效率低、存在局部极小值、网络隐含节点数的选取缺乏理论性指导等问题,本文采用了粒子群算法作为BP网络权值的学习算法,从而实现了对标准BP网络的改进,并建立了PSO-BP。
传统的粒子群优化算法(Particle Swarm Optimization, PSO)[3]是一种基于群智能方法的演化计算技术,它初始化为一群随机粒子,并通过迭代找到最优解。在每一次迭代中,新一代群体的速度及位置的更新算法如(4)式[4]所示:
vim(k+1)=vim(k)+cl*f1(k)-xim(k))+c2*r2(k)*(pgm(k)-xim(k))
xim(k+1)=xim(k)+vim(k+1)
其中:i=1,2,3,…M
vim(k) ,xim(k)分别表示第i个粒子在k次迭代中的第m维的速度和位置;
PIim(k)表示第i个粒子在k次迭代中的第m维搜索到的该粒子的历史最优解(位置);
Pgm(k)表示整个粒子群搜索到的最佳位置即全局最优解(位置);
c1,c2为加速系数,是非负常数,r1,r2是介于[0,1]之间的随机数。
在本设计中所用到的粒子群算法主要是用于对BP神经网络的权值的调整过程中,具体训练过程如下:
1)对待训练和学习的参数进行初始化。包括BP网络结构,各层初始权值等,在仿真中,将训练用粒子的飞行位置及速度向量都设计成两维;
2)根据(2)与(3)式计算整个BP神经网络的的输出Kp,Ki,Kd;
3) 根据粒子群算法的位置和速度公式(4)来更新每一个粒子的当前速度和位置;
4)计算和评价每一个粒子的适应度,从而来更新个体的极值和全局的极值,定义的适应度函数为:
(4)
其中:Vg(k)为给定的电机目标转速输出量,V(k)为电机转速的实际输出量;
5)根据 (1) 式来计算PID控制器的输出u(k);
6) 检验结束条件。当结束条件满足时,即得到了神经网络的隐层和输出层的参数权的最优值,然后,再将该参数进行存储,训练过程即结束,否则转至2)继续搜寻。
3 仿真过程及结果
为了验证设计控制方案的有效性,利用 Matlab/Simulink[5]软件对改进型BP神经网络PID控制器进行计算机仿真分析,并与常规PID控制器进行对比分析。采用了速度、电流闭环控制方法对该建模方法进行了测试。
其中,无刷直流电机参数设置为:额定功率为3 kW,额定转速为2000 r/min,额定电流为5 A,电枢绕组相电阻R =0.75Ω,电枢绕组电感L=1.35 mH,转动惯量J=1.34×10-3kg.m2。实验中,设置在t=2s时突然改变负载,仿真比较曲线如图4所示。

(a)改进型BP神经网络PID控制器转速仿真曲线 (b)常规的PID控制器转速仿真曲线
仿真实验结果表明:利用改进型BP神经网络PID控制的电机转速响应快、转速波动小、调节时间短,波形符合理论分析,系统能平稳运行,其性能明显优于常规PID控制,具有优良的静态和动态性能。
4 结语
本文结合神经网络超强的自学习和非线性逼近能力,提出了基于BP神经网络的PID控制算法。同时,针对传统BP算法的缺点,提出了利用粒子群来对网络权值进行学习,有效利用粒子群算法的收敛速度快,运算简单,易于实现,且可以解决大量的非线性,复杂的优化问题的优点,建立了PSO-BP神经网络,通过神经网络的学习能力,找到最优控制下的P、I、D 参数,仿真结果验证了这种控制方法的有效性,表明该系统比普通控制器具有更好的动、静态特性。
[参考文献]
[1] 李斌,唐永哲.模糊PID算法在无刷直流电机控制系统中的应用[J].微电机,2006,39(2):14-15.
[2] 李钟明,刘卫国.稀土永磁电机[M].北京:国防工业出版社,1999:35-50.
[3] 谢富强,唐耀庚.多层前向神经网络权值初始化的研究进展[J].南华大学学报,2006,20(3):98-101.
[4] 窦全胜,周春光,刘晓华,等.关于PSO方法中粒子运行轨迹的修正[J].计算机科学,2007, 34(8):141-143.
[5] 刘金锟.先进PID控制MATLAB仿真[M].2版.北京:电子工业出版社,2004:96-103.
