永磁偏置磁悬浮轴承功率放大器的设计与实现
2010-09-08齐洪喜黄平林赵立忠
齐洪喜,黄平林,赵立忠
(中国船舶重工集团第七一0研究所,上海 200940)
永磁偏置混合磁悬浮轴承采用永磁与电磁混合磁路结构,永磁磁场替代电励磁磁场作为偏置磁场,可消除偏置电流及其引起的损耗,使电磁铁的安匝数减小一半,从而减小磁轴承的体积,显著降低功率放大器的损耗,因此,混合磁悬浮轴承近年来得到了业界的普遍关注。
在磁悬浮轴承控制系统中,功率放大器的作用是向电磁线圈提供相应的电流,包括偏置电流和控制电流,来产生所需的电磁力,目前磁悬浮轴承所用控制器大多为开关功率放大器。对一般的电励磁悬浮轴承,电磁线圈中的电流方向不需要改变,采用的功率放大器不需要作电流的方向控制,而永磁偏置的混合式磁轴承所采用的功率放大器需要其输出电流能双向流动,因而需要设计专门的功率放大器主电路结构。
文献[1]对永磁偏置磁悬浮轴承的功放电路的拓扑结构作了较为详尽的归纳和介绍;文献[2]中采用集成功放芯片SA60,可满足各种驱动需求,但SA60价格昂贵,限制了其广泛应用;文献[3-6]中采用全桥或半桥电路,通过控制器输出多路PWM信号来控制功放电路输出电流的大小或方向。由于磁悬浮轴承功率放大器的输出路数往往较多,全部采用PWM输出控制,就要求控制器具备足够多的PWM输出端口,同时还要占用较多的控制器的其他硬件和软件资源,从而提高了设备成本。
为此,笔者在此基础上提出了一种功率放大器电路结构,其主电路结构仍采用普通桥式电路,但其控制信号是通过控制器输出的PWM信号和换向信号经逻辑变换而来,从而节省了一半的控制器资源,且功率放大器的输出电流可灵活换向,适用于混合磁悬浮轴承,对其他应用场合也具有较好的通用性。采用该方法设计的磁悬浮轴承功率放大器在实验样机中得到了较好的应用。
1 功率放大器电路设计
1.1 主电路工作原理
根据混合磁悬浮轴承的工作特点[7],所设计的功率放大器主电路框图如图1所示。其中R和L为电磁铁线圈的等效电路,V1、V2、V3、V4为续流二极管,保证电磁铁线圈中的反向感应电动势得以释放。输入信号Ctrl控制电磁铁线圈中电流的方向,驱动电路将PWM信号转变为功率管Q1、Q2、Q3、Q4的开通和关断,从而实现对负载能量的控制。
在整个过程中必须保证Q1、Q4同时开通的情况下Q2、Q3同时关断,在Q3、Q2同时开通的情况下Q1、Q4同时关断。如果Q1和Q2或Q3和Q4同时开通,必然使得VCC与地之间直接短路,这就有可能烧坏功率管。因此,需要在 Q1、Q2之间,以及Q3、Q4之间形成“死区”,传统产生“死区”的方法是使用延迟电路,通过延迟电路的PWM信号控制 Q1、Q4以及 Q2、Q3中的一对信号,而未通过延迟电路的PWM信号控制另外一对。使用这种方法会增加驱动电路的复杂性,同时延迟电路的延迟时间也不易控制。
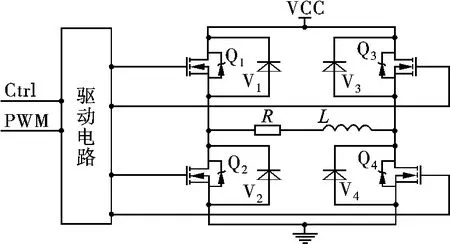
图1 功率放大器主电路框图
1.2 驱动电路设计
驱动电路采用IR公司生产的半桥驱动集成芯片IR2104,IR2104通过特有的自举电路可以使上管驱动,采用外部自举电容上电,可以大大减少驱动电源的数目。对于该设计中所使用的电路,仅需要1路12 V电源,大大减少了驱动电路的体积和供电电源数目,同时性价比也得到了大大提高,IR2104的典型电路如图2所示。

图2 IR2104典型电路
IR2104相对于IR公司的其他驱动芯片来讲,最大的特点是其上管与下管驱动(HO与LO之间)时序内置了“死区”。该“死区”的时间最小值为400 ns,最大值为 650 ns,典型值为 520 ns,HO 与LO之间的死区如图3所示。通过这种死区设置就可以避免上下驱动管同时导通的情况出现。
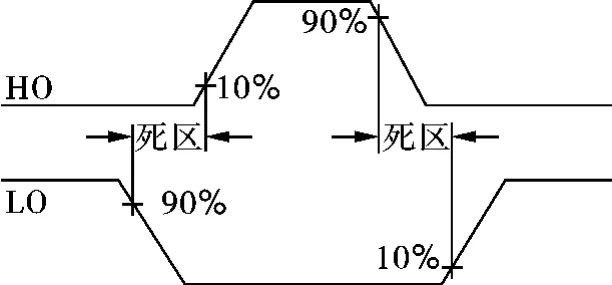
图3 HO与LO之间的死区
IR2104的使能信号输入(SD)最大可以使用VCC电压,这样对于不需要控制IR2104使能的驱动电路,可以直接将SD管脚直接连接到VCC,从而减少了控制信号的输入。
1.3 功率放大器电路结构
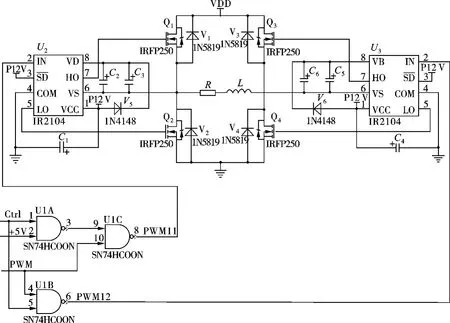
图4 混合磁悬浮轴承功率放大器的电路结构
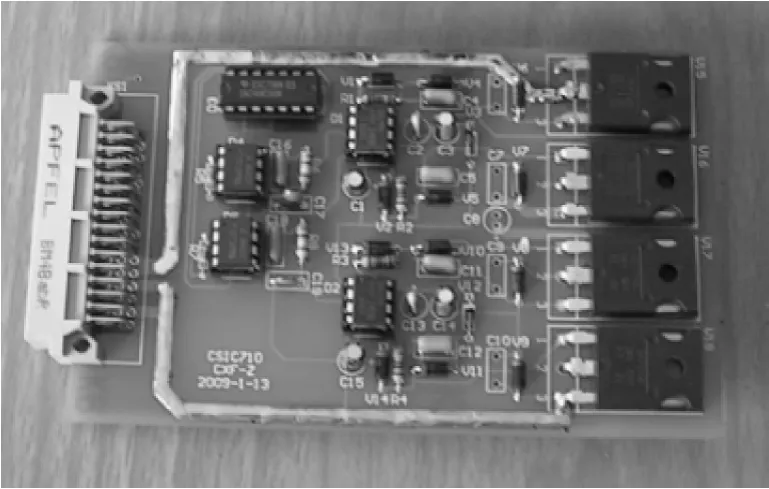
图5 功率放大器电路实物图
设计的功率放大器的电路结构如图4所示,电路实物图如图5所示。该电路中Ctrl输入信号控制电磁铁线圈中电流的方向,若Ctrl为高电平,当PWM为高电平时,PWM12为低电平,PWM11为高电平。此时U2的HO输出高电平,U2的LO输出低电平,Q1导通,Q2截至,同时,U3的HO输出低电平,U3的LO输出高电平,Q3截至,Q4导通,电流沿Q1→电磁铁线圈→Q4方向流动。当PWM为低电平时,PWM12为高电平,PWM11为高电平。此时U2的HO输出高电平,U2的LO输出低电平,Q1导通,Q2截至,U3的HO输出高电平,U3的LO输出低电平,Q3导通,Q4截至,电磁铁线圈中没有电流;若Ctrl为低电平,当PWM为高电平时,PWM12为高电平,PWM11为低电平。此时U2的HO输出低电平,U2的LO输出高电平,Q1截至,Q2导通,U3的HO输出高电平,U3的LO输出低电平,Q3导通,Q4截至,电流沿Q3→电磁铁线圈→Q2方向流动。当PWM为低电平时,PWM12为高电平,PWM11为高电平。此时U2的HO输出高电平,U2的LO输出低电平,Q1导通,Q2截至,U3的HO输出高电平,U3的LO输出低电平,Q3导通,Q4截至,电磁铁线圈中没有电流。
在图4所示的电路中,通过控制Ctrl信号的高低,就可以控制通过电磁铁线圈中电流的方向,IR2104内置“死区”设置可避免 Q1和 Q2、Q3和Q4同时导通情况的出现。
为了减少驱动电路对前级控制电路的影响,可以在U1C和U1B的输出端使用高速光藕6N137进行隔离,将PWM11和PWM12隔离后的信号输入至U2和U3。
2 实验结果
笔者设计的功率放大器目前已经应用在永磁偏置混合磁悬浮轴承中,使用效果良好。使用示波器测量Q1和Q2两功率管两端电压界面图[8]如图6所示,这两个功率管的导通和关断是正好相反的。图7和图8分别为对应两个边缘的死区界面图,从图7和图8中可以看到Q1和Q2是不会同时导通的,只有在Q1完全关断后Q2才导通,Q2完全关断后Q1才导通,这样就可以有效防止电路的直通现象。
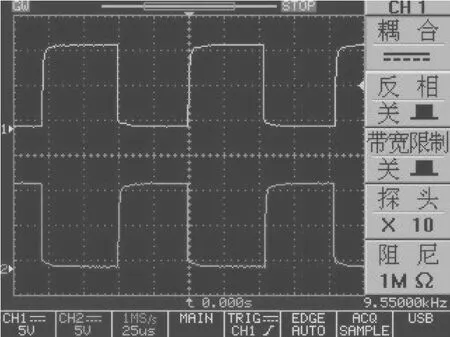
图6 测量Q1和Q2两端的电压界面图

图7 一个边缘的死区界面图
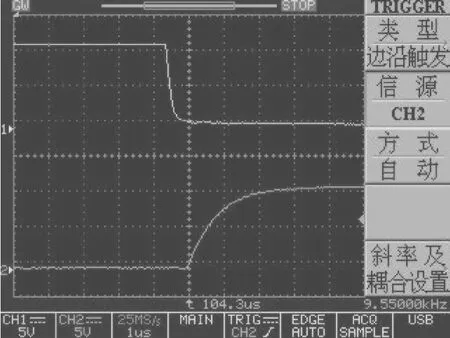
图8 另一个边缘的死区界面图
3 结论
根据永磁偏置混合磁悬浮轴承的工作特点,设计了一种输出电流方向转换灵活的功率放大器电路。该电路已经在混合磁悬浮轴承系统中应用,在使用过程中该功率放大器电路完全能够满足混合磁悬浮轴承系统的需求,运行稳定。
[1]宗鸣.永磁偏置混合式磁轴承及其控制方法的研究[D].沈阳:沈阳工业大学图书馆,2007.
[2]ZHANG J.Power amplifier for magnetic bearings[D].Switzerland:Swiss Federal Institute of Technology,1995.
[3]李祥生,邓智泉,王晓琳.基于SVPWM的磁轴承开关功率放大器的研究[C]//第二届磁悬浮轴承学术会议.南京:[s.n.],2007:345-351.
[4]冯丰,林小玲,余渊.单电磁铁悬浮系统的驱动电路设计与改进[J].仪表技术,2007(2):25-26.
[5]杨作兴,赵 雷,赵鸿宾.磁轴承MPW开关功率放大器的研究[J].电力电子技术,2000,34(5):23-25.
[6]曾学明,徐龙祥,刘正埙.电磁轴承三电平PWM功率放大器研究[J].电力电子技术,2002,36(3):13-15.
[7]王军,徐龙祥.磁悬浮轴承并联谐振直流环节开关功率放大器[J].中国电机工程学报 ,2009,29(12):87-92.
[8]ZHANG L,FANG J C,LIU G.Modeling and simulation of the switching power amplifier for magnetic suspending flywheel[C]//The Eighth International Symposium on Magnetic Suspension Technology.Dresden:[s.n.],2005:1007-1012.