基于最优粘着利用的地铁牵引电机并联控制策略
2010-06-30林文立刘志刚孙大南吴佐民刁利军
林文立 刘志刚 孙大南 吴佐民 刁利军
(北京交通大学电气工程学院 北京 100044)
1 引言
由于空间、成本限制,地铁列车一般采用架控模式,即一台牵引变流器驱动同一转向架上的两台牵引电机并联运行,每台电机通过齿轮箱与车轮机械连接。在转向架的制约下,两个车轮的轮缘线速度是相同的,但由于受到摩耗、镟轮、折旧换新等因素影响,两个动轮之间必然存在轮径差异,由此造成两台电机转速和转矩均不相同。此外,列车前进主要依靠车轮与钢轨之间的粘着力随轨面状况的不同变化很大,比如潮湿、树叶、油污等都会造成可利用粘着的陡降。因此,如果不采取适当的粘着控制策略,当电机转矩大于粘着力矩时车轮会空转或打滑,不仅影响乘客旅行舒适度,降低地铁车辆性能,而且会加剧轮轨间的摩耗。
文献[1-2]采用模糊控制算法来预测并抑制车轮空转/打滑的发生,但由于模糊逻辑复杂、编程困难,迄今为止在地铁牵引传动等可靠性、安全性较高的领域没有使用先例。
文献[3-4]提出基于转子平均磁场定向的并联电机矢量控制策略,但其控制目标是要达到相同的转速,而忽略了电机间转矩的不平衡,这样的控制思路不太适用于地铁传动。
文献[5]采用定子磁场定向控制策略对机车轮径差造成的并联电机转矩不平衡进行控制,但是该文采用传统粘着控制方法,导致可用粘着的利用率非常低。
本文提出一种基于最优粘着利用的地铁并联电机控制策略,以保证最易空转或打滑的车轮能最大化利用当前粘着,并降低轮径差引起的转矩不平衡度,提高两电机的平均输出转矩。文中重点介绍了最优粘着控制的实现方法,引入转矩不平衡度的概念,深入分析了导致地铁并联电机转矩不平衡的原因,并有针对性地提出牵引电机并联控制策略。最后,进行了仿真研究和试验验证。
2 地铁牵引传动系统的组成
图1为地铁牵引传动系统的基本组成框图,S1和S2为速度传感器。每节地铁车辆有2个转向架,每个转向架上有2个牵引电机驱动的动轴。牵引电机控制系统接收由司控手柄给定的转矩指令T*,经过最优粘着控制模块对转矩指令加以限制,给出电机矢量控制所需的转矩给定T*m,保证轮轨间的最优粘着状态。并联牵引电机控制模块根据车速和电机转速信号,计算出两个动轮的轮径差,并根据差值大小对牵引电机励磁进行补偿,得到电机矢量控制所需的励磁给定ψ*m。同时,给出参考转子角速度ω 用于电机矢量控制和最优粘着控制。最后经过间接磁场定向的矢量控制模块产生 PWM 脉冲,将1500V DC逆变成电压、频率均可变的交流电对牵引电机进行变频调速,以带动地铁列车整体向前运行。
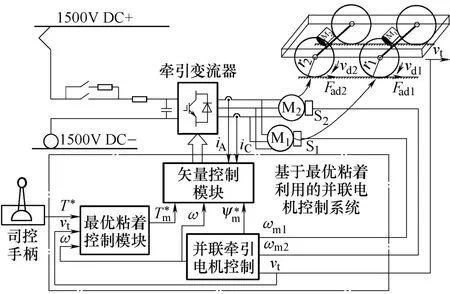
图1 地铁牵引传动系统组成框图Fig.1 System diagram of metro traction inverter
3 最优粘着利用控制
3.1 轮轨粘着机理
粘着力是由于车轮和钢轨的接触面上出现一定的车轮相对车体的切向运动时产生的,这种切向运动速度称为蠕滑速度,表示为

式中,vslip为蠕滑速度;vd是车轮轮缘线速度;vt是车体速度;Fadhesion为粘着力;µ为粘着因数;M为平均轴重;g为重力加速度常数。
通过对转向架上的动轴(带牵引电机)进行受力分析可知,由粘着力Fadhesion产生的转矩实际上是牵引电机的负载转矩。故有

式中,TL为牵引电机负载转矩;r为动轮半径;Rg为齿轮箱传动比。
大量的分析以及试验结果表明,粘着力随着蠕滑速度的增加而增大,但当蠕滑速度增大到某一值以后仍继续增加,粘着力会陡降,这被称为粘着特性[6]。粘着特性可以用粘着因数与蠕滑速度之间的关系表达,图2给出了不同路况下最大可利用的粘着特性曲线[7]。虽然不同路况的粘着特性曲线各不相同,但在各种路况下都存在相应的粘着峰值点(µmax,vslip),即该点处所能提供的粘着力最大。
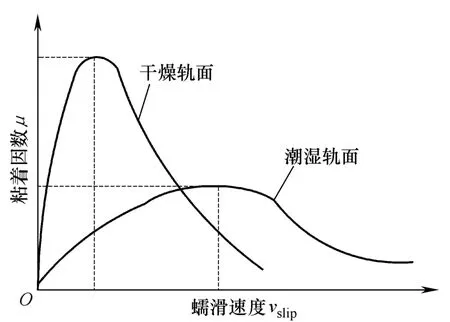
图2 干燥、潮湿路况下最大可利用的粘着曲线Fig.2 Typical maximum adhesion characteristics curves for dry and wet conditions
最优粘着控制的本质,就是在路况粘着恶化时,自动搜寻当前路况下的粘着峰值点,通过并联电机控制,保证最易空转/打滑的动轴车轮运行在粘着峰值点附近,从而达到对当前粘着的最优利用。
3.2 基于全维状态观测器的最优粘着利用控制
从图2中的粘着特性曲线可以看出,粘着峰值点左侧 dµ/dvslip>0,右侧 dµ/dvslip<0,在峰值点附近,dµ/dvslip≈0,而
式中,蠕滑速度vslip可由式(1)求得,粘着因数 µ由式(2)~式(3)可知,与电机负载转矩TL成正比。但是在实际列车运行过程中,根本无法检测电机的负载转矩。因此,提出建立全维状态观测器来观测牵引电机的负载转矩TL。
事实上,列车在两站间运行时,由于其巨大的惯性,牵引电机负载转矩基本不会突变,即使是在最极端的情况下(比如列车运行于露天轨道,由于雨雪天气造成粘着因数的陡然下降),由于电机轴端还通过齿轮箱与笨重的轮对机械连接,其负载转矩扰动的变化时间常数也远远大于控制器的时间常数,因此在建立状态观测器时,可认为牵引电机负载转矩(即式(3)中TL)为一常数。
此外,牵引电机的转动方程

式中,Jm为电机惯性常量;ω 为电机转子角转速;Tm为电机电磁转矩;B为电机粘滞系数。
根据式(3)和式(5),可得如下状态空间表达式[8-9]:
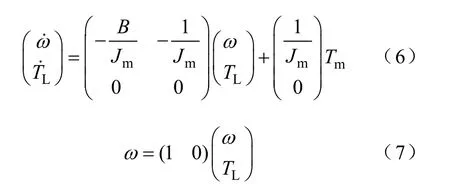
根据线性定常系统的能观性判据可知,上述线性定常系统是完全能观的,因此状态矢量(ω,TL)T可由 Tm和ω 进行重构(即建立状态观测器,使观测结果无限接近实际值)。地铁车辆电磁环境恶劣,系统安全性能要求很高,为实现高性能的交流电机控制,采用全维状态观测器,以避免因噪声干扰或者测量误差对系统性能造成的影响。根据式(6)和式(7)构造具有反馈增益矩阵的全维状态观测器[10],如下:
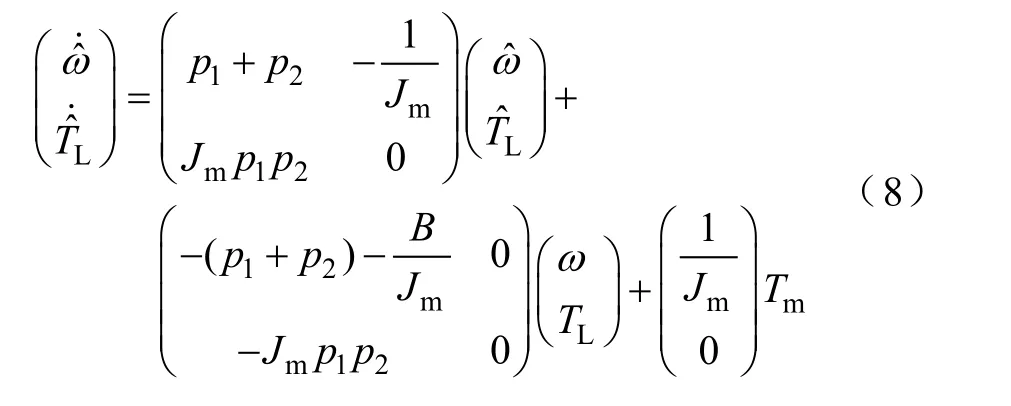
图3所示为最优粘着控制算法框图。
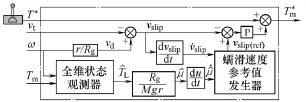
图3 最优粘着控制算法框图Fig.3 Diagram of optimized adhesion control
图3中的输入量有:司控手柄指令T*,车体速度vt、电机转子角转速ω 和电机实际电磁转矩Tm,输出量为电机矢量控制转矩给定。全维状态观测器模块根据式(8)设计,其输出即为观测到的电机负载转矩,然后根据式(2)和式(3),求得对应的粘着因数,对其微分作为蠕滑速度参考值发生器的一个输入量。蠕滑速度参考值发生器的作用是在列车运行过程中,自动搜索当前路况下的最佳蠕滑速度值,保证粘着利用区域始终在粘着峰值点附近,即达到最佳的粘着利用。它的另一个输入量是对式(1)中vslip微分得到,输出即为经过优化选择的蠕滑速度参考值,具体选择方法如下:

式中,α、β 为修正常数(均取值 1e-5);式(9)左侧 vslip(k+1)即为图 3中最优蠕滑速度参考值发生器的输出值vslip(ref)。
最优蠕滑速度参考值 vslip(ref)与当前实际蠕滑速度 vslip的差值,经比例调节后,其结果与司控手柄指令T*做加法,即得出电机控制所需的转矩给定信号。
4 由轮径差异造成的转矩不平衡及控制策略
由于受机械制约,同一转向架下的两个动轮轮缘线速度(vd)是近似相同的,即

式中,D1、D2分别为电机 1、2所在的动轮直径;n1、n2分别为电机1、2的转速。
地铁同一转向架上的两台牵引电机,通常人为选择、保证基本参数一致[12],因而本文中并联电机控制,只考虑轮径差异的影响。
根据式(10),设轮径 D1>D2,那么 n1>n2。如图4所示,由于异步电动机硬的转矩特性,转差率的细小差别也会对同一逆变器供电的并联牵引电机的负荷分配产生极大影响,进而出现并联电机的转矩不平衡。轮径差值越大,转矩不平衡越严重,导致其中一个电机最大化利用当前粘着而另外一个实际转矩很小,即转向架整体的平均粘着利用率不高,影响地铁列车的加减速性能。
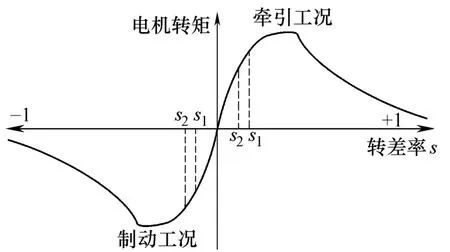
图4 牵引电机转矩-转差率曲线(轮径D1>D2)Fig.4 Motor“torque-slip ratio”characteristics(D1>D2)
在交流传动牵引控制系统中,转差率s一般很小,可认为

式中,Km为电机常数;U1为电机定子端电压;f为定子频率。
假设同一转向架下两台牵引电机1和2特性完全一致,并且两台牵引电机由一个逆变器供电,因此它们的U1和f是相同的,进而可知牵引电机输出转矩T与电机转差率s成正比。假设牵引电机1的转矩为T1、转差率为s1,牵引电机2的转矩为T2、转差率为 s2,两台电机的输出转矩平均值为 T,转速平均值为n,转差率平均值为s,两个动轮的轮径平均值 D=(D1+D2)/2,轮径差∆D=D1-D2(设 D1>D2),那么,T1/T=s1/s,也即
由式(10)知,n1=nD/D1。
设逆变器控制的同步速度为ns,定义∆T=T1-T,则转矩不平衡度∆T/T为
由式(11)可知,地铁架控并联电机的转矩不平衡,与牵引异步电动机的时间常数、逆变器供电电压及频率无关,只与轮径差异和电机的转差率有关。轮径差不可控制(但可以检测),因此为抑制地铁并联电机转矩不平衡,必须对转差率 s(或转差角速度ωsl)加以限制。
图5所示为地铁并联牵引电机抑制转矩不平衡控制框图。当地铁列车处于惰行(牵引力为零)状况时,“轮径差值计算”模块会根据列车速度 vt和电机 1/2转速ω1/ω2计算出两电机所在的车轮直径D1和 D2,进而计算出轮径差∆D。并联牵引电机控制根据∆D的大小选择磁通衰减信号∆ψ,使能电机励磁补偿功能。牵引电机磁通给定ψ*是车速的函数,它与∆ψ 的差值作为电机矢量控制所需的磁通给定指令。这样在电机矢量控制算法[13]中,因为减小,定子电流磁通分量给定值也减小,而转矩分量给定增大(因为转矩给定是不变的),从而增加了转差角速度给定ωsl,也即提高了平均转差率,使得两电机间转矩不平衡程度减小。最后经过电机矢量控制算法产生牵引变流器驱动脉冲。需要指出的是,地铁牵引电机转差率调节范围是有限度的,过大则电机效率下降,一般限制在5%以内。
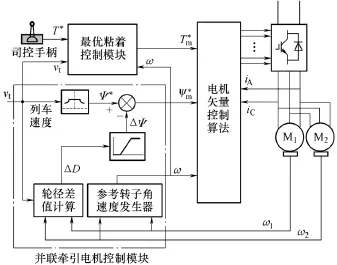
图5 牵引电机并联控制策略框图Fig.5 Diagram for metro paralleled motor control
另外,最优粘着控制以及电机矢量控制算法均需要参考转子角速度值ω,但ω 不应该简单地认为是ω1和ω2的平均值。从图 4可以看出,轮径 D1>D2,在牵引加速过程中,电机1转差率大(电机转速ω1低),稳态时输出转矩大,在地铁列车运行过程中更易发生空转;而在制动过程中,电机2转差率大(电机转速高),稳态时输出转矩大更易发生打滑现象。因此,从牵引电机的最优粘着控制的角度出发,需按照以下方法选择参考转子角速度ω:①牵引时:ω =min(ω1,ω2);②制动时:ω =max(ω1,ω2)。
5 仿真研究
为了对基于最优粘着利用地铁牵引并联电机控制进行研究,在Matlab中搭建了牵引传动系统仿真模型,下表为模型仿真参数。
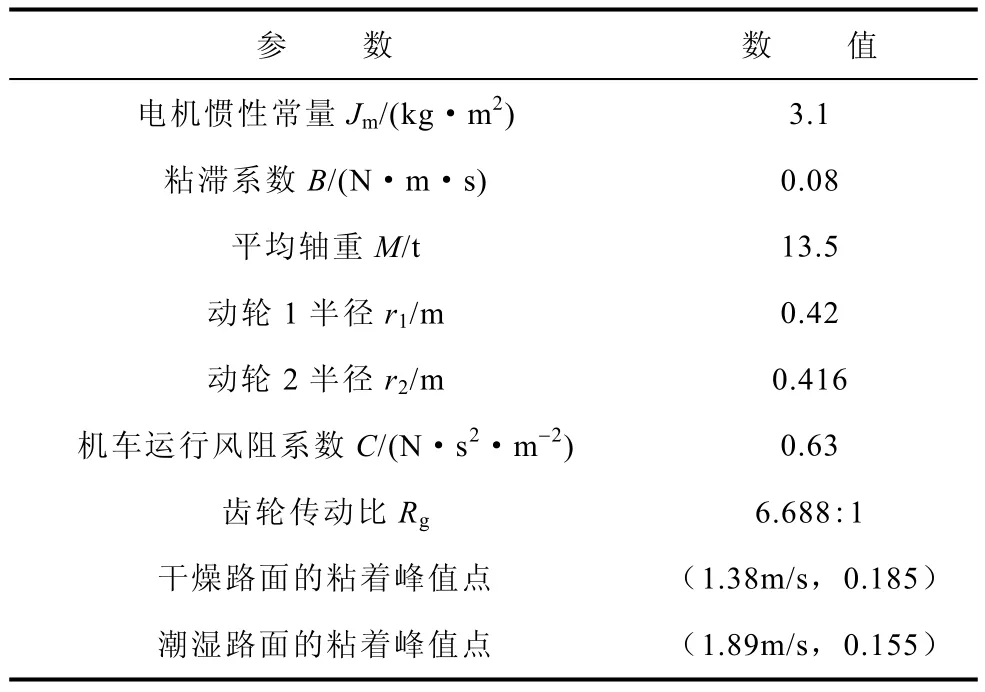
表 模型仿真参数Tab. Parameters of simulated model
为了验证最优粘着控制算法的正确性,进行牵引加速过程中路况恶化(由干燥变化为潮湿)时的仿真,图6所示为仿真过程中动轮1、2轮缘线速度vd1、vd2,车体速度vt,模拟司控手柄给定转矩指令T*,电机1、2的转矩Tm1、Tm2,电机1、2的定子A相电流iA1、iA2波形图。
图6b中的初始时刻,模拟司控手柄给定转矩指令T*为1490N·m。可以看出,图6d、图6e中电机1和电机2经过VVVF软起动电机电流稳步上升,图 6b、图6c中电机转矩Tm1、Tm2也稳步提升至最大转矩,跟随转矩给定指令T*,转矩响应比较平稳,图 6a中动轮 1、2轮缘线速度 vd1、vd2,车体速度vt也逐步升高。
t=5s时,路面由干燥转为潮湿,由于路面可用粘着急剧下降,动轮1和2均发生空转现象,图6b、图 6c中电机转矩 Tm1、Tm2迅速下降,基于全维状态观测器的中最优粘着控制模块自动并快速搜索当前路况的粘着峰值点;在t=8.1s时,电机1转矩接近潮湿路况下可利用的最大粘着转矩,在此以后保持最优粘着推动列车前进。最优粘着控制模块发挥作用期间(t=5~8.1s),电机电流变化比较平稳,转矩响应也稳步提升,保证了牵引传动系统的稳定和可用粘着的最优利用。
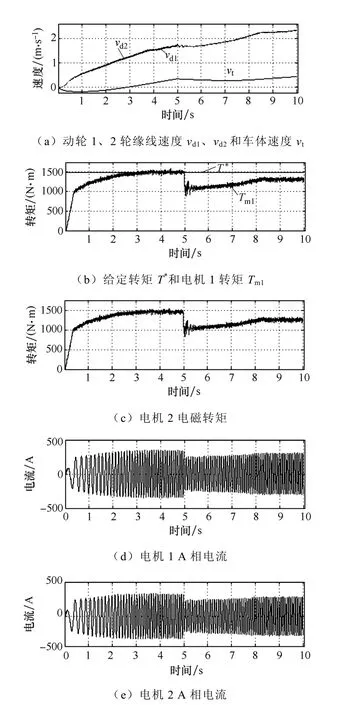
图6 路况由干燥变为潮湿时的仿真波形Fig.6 Simulation waveforms from dry condition changing into wet condition
为了分析验证并联电机优化控制中励磁补偿环节的实施效果,进行如下仿真并获得了如图7所示的波形。
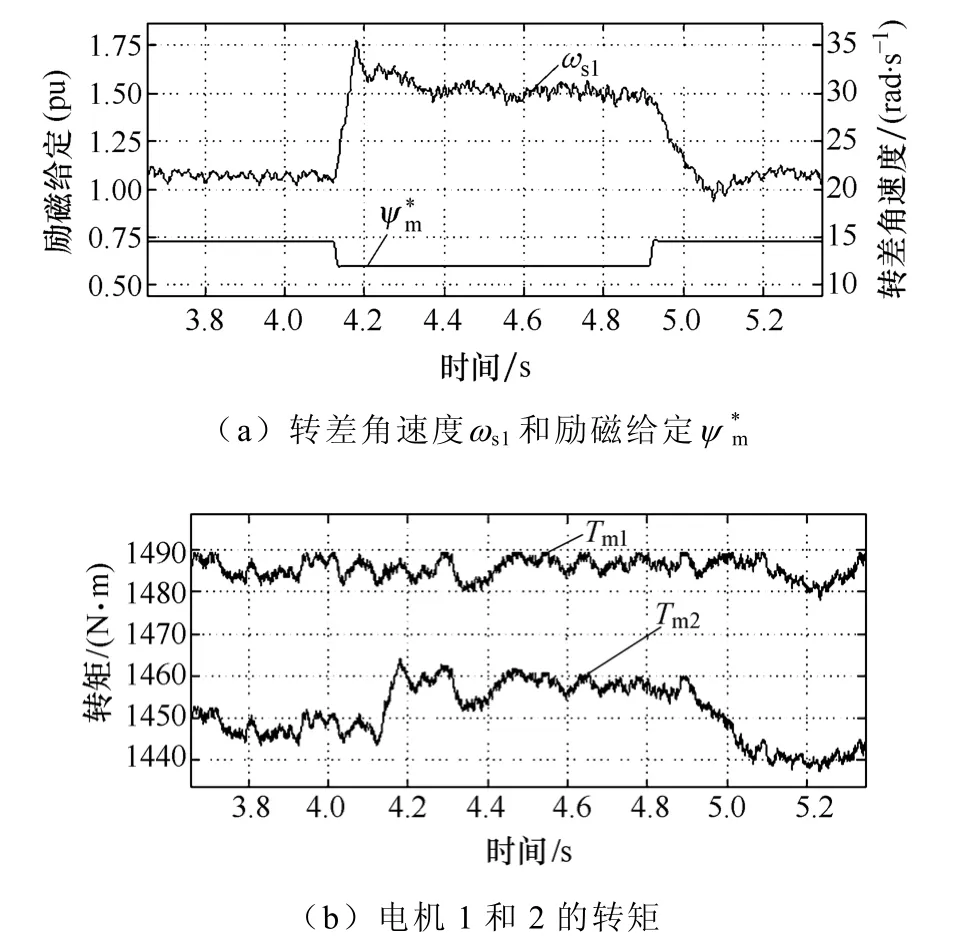
图7 “励磁补偿”环节实施效果的仿真波形Fig.7 Simulation waveforms for magnetizing compensation’s effection
仿真结果表明,即使路况由干燥突变为潮湿,所提出的牵引电机最优粘着控制策略仍可自动搜索粘着峰值点并实现对当前路况下最优粘着利用,同时并联牵引电机抑制转矩不平衡控制策略的实施,也降低了两电机间的转矩不平衡,保证了列车整体牵引能力(整体粘着利用率)的提高。
6 试验验证
使用基于最优粘着利用的牵引电机并联控制策略的牵引变流器,在某地铁线路进行了洒自来水/混合液的粘着利用试验,以考核地铁列车实际运营过程中,由干燥路面突然转为湿滑路面时的牵引电机防滑/防空转能力,试验波形如图 8所示,其中图 8a为司控手柄给定的转矩指令和实际牵引电机电磁转矩随时间变化的曲线,图 8b为实时计算的牵引电机 1功率和动轴 1速度随时间变化的曲线。
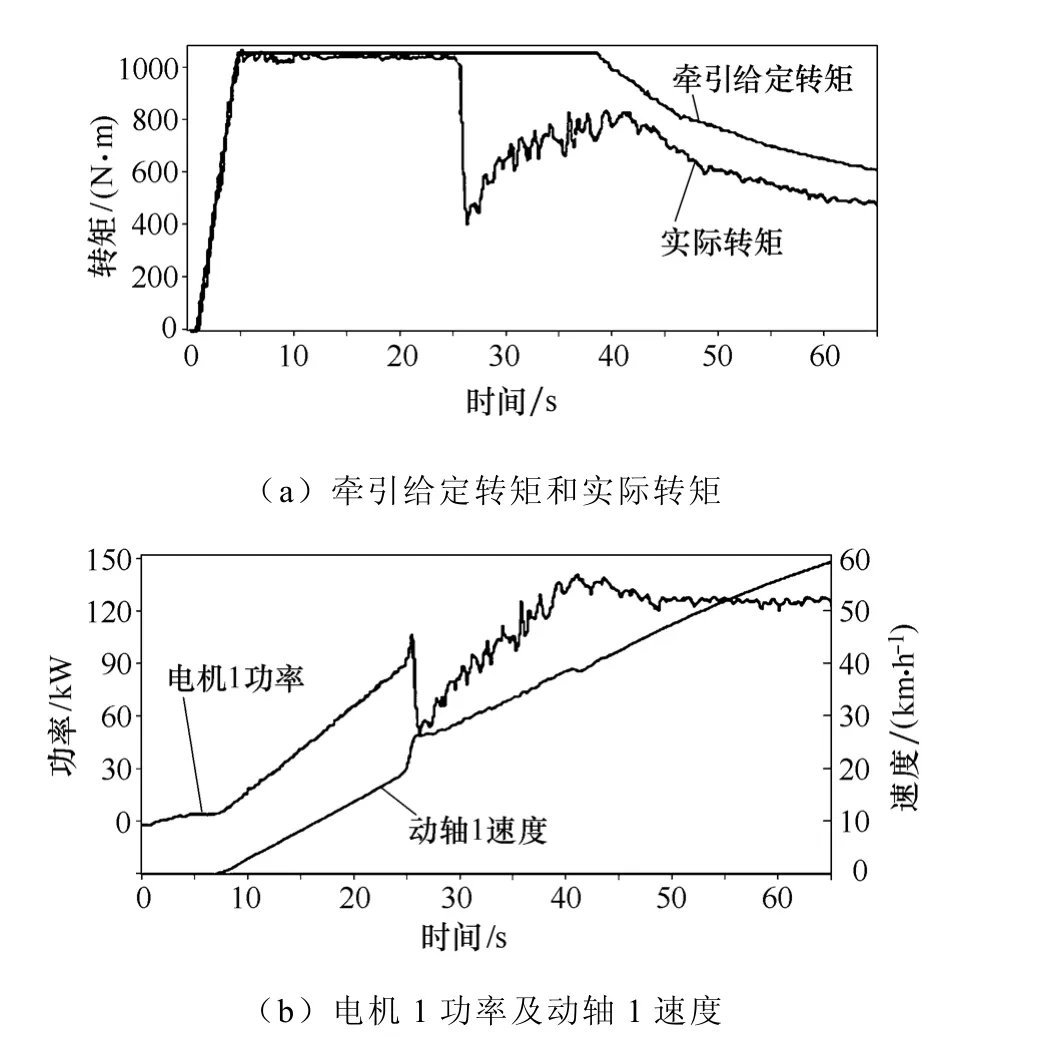
图8 电机转矩、功率、转速试验波形Fig.8 Experimental waves for motor torque,power and speed
试验如下:t=7s时列车启动,司机手柄给定最大牵引力全力加速。如图8a所示,t=25s时列车进入洒水/混合液的路面,此时,由于路面由干燥突然转变为湿滑,轮轨间可用粘着急剧下降,图8b中动轴1速度突变,但在可以控制的范围之内。此时,基于最优粘着利用的电机控制策略,快速判断并搜索当前路况的可用粘着情况,控制电机电磁转矩逐渐接近当前可利用的最大粘着区域,如图8a所示,在t=35s左右,电机实际输出转矩基本稳定。
根据地铁列车的牵引特性,车速大于 35km/h时,进入恒功率运行阶段,此时图8a中电机转矩指令呈一次方下降,电机实际输出转矩也跟随下降,从图8b电机功率曲线看出,t=40s之后电机功率基本稳定,满足地铁列车的要求。
通过对试验波形分析可以看出,基于最优粘着利用的地铁并联电机控制策略实施效果基本与模型仿真结果一致,牵引电机控制粘着利用率大于80%,而且电机响应快速、平稳,满足地铁列车的设计要求,证明了所提出的基于最优粘着利用的牵引电机控制策略的正确性。
7 结论
粘着控制是地铁牵引电机控制领域特有的、并且是必须解决的问题,本文使用全维状态观测器观测电机负载转矩,用以计算并判断当前粘着利用情况,然后通过限制电机给定转矩来实现对当前可用粘着的最大利用。此外,深入分析了地铁架控并联电机转矩不平衡的原因,并结合最优粘着控制,提出了带励磁补偿的牵引电机并联控制策略,降低了电机间的转矩不平衡,当路面粘着状况恶化时,可以提高整体的粘着利用率。通过对Matlab模型的仿真研究和试验,验证了所提出的电机控制策略的正确性。
[1]Kansala K, Hasemann J. An embedded distributed fuzzy logic traction control system for vehicles with hydrostatic power transmission[C]. IEEE 7th Mediterranean Electrotechnical Conference, 1994, 2:719-722.
[2]Hasemann J, Kansala K. A fuzzy controller to prevent wheel slippage in heavy duty off road vehicles[C].IEEE 44th Vehicular Technology Conference, 1994:1108-1112.
[3]李卫超, 胡安, 聂子玲, 等. 异步电机并联运行磁场定向控制[J]. 电工技术学报, 2006, 21(11): 21-27.Li Weichao, Hu An, Nie Ziling, et al. Field-oriented control of parallel-connected induction motors[J].Transactions of China Electrotechnical Socity, 2006,21(11): 21-27.
[4]李卫超, 胡安, 聂子玲. 感应电机并联运行矢量控制系统仿真研究[J]. 电机与控制学报, 2006, 10(1):102-106.Li Weichao, Hu An, Nie Ziling. The simulation research on vector control of parallel-connected induction motors[J]. Electric Machines and Control, 2006, 10(1):102-106.
[5]Matsumoto Y, Osawa C, Mizukami T, et al. A statorflux-based vector control method for parallel-connected multiple induction motors fed by a single inverter[C].Applied Power Electronics Conference and Exposition, 1998: 575-580.
[6]李江红, 马健, 彭辉水. 机车粘着控制的基本原理和方法[J]. 机车电传动, 2002 (6): 4-8.Li Jianghong, Ma Jian, Peng Huishui. Basic principle and methods of adhesion control of locomotive[J].Electric Drive for Locomotives, 2002(6): 4-8.
[7]徐立恩, 陈华国, 曾云, 等. 广州地铁车辆国产化改造的粘着利用控制[J]. 机车电传动, 2008(6): 44-47.Xu Lien, Chen Huaguo, Zeng Yun, et al. Adhesion control of localized modification guangzhou metro vehicle[J]. Electric Drive for Locomotives, 2008(6):44-47.
[8]Kawamura A, Furuya T, Takeuchi K, et al. Maximum adhesion control for Shinkansen using the tractive force tester[C]. IEEE 2002 28th Annual Conference of the Industrial Electronics Society, 2002: 567-572.
[9]Takaoka Y, Kawamura A. Disturbance observer based adhesion control for Shinkansen[C]. IEEE 6th International Workshop on Advanced Motion Control,2000: 169-174.
[10]刘豹. 现代控制理论[M]. 北京:机械工业出版社,1994.
[11]宋文祥, 姚钢, 周文生, 等. 异步电机全阶状态观测器极点配置方法[J]. 电机与控制应用, 2008,35(9): 6-10.Song Wenxiang, Yao Gang, Zhou Wensheng, et al.Pole arrangement method of full-order state observer for asynchronous motors[J]. Machine and Control Application, 2008, 35(9): 6-10.
[12]杨旭丽, 彭星明. 机车牵引电机一致性问题与匹配[J]. 电机技术, 2007 (1): 14-15.Yang Xuli, Peng Xingming. The coherence and matching problem between locomoive traction motors[J]. Motor Technology, 2007(1): 14-15.
[13]杜永红, 李哲峰, 刘志刚. 异步电动机间接磁场定向控制双闭环系统[J]. 电工技术学报, 2009, 24 (5):24-28.Du Yonghong, Li Zhefeng, Liu Zhigang. Indirect field orientation double close loop system of induction motors[J]. Transactions of China Electrotechnical Socity, 2009, 24 (5): 24-28.
