混合驱动水下滑翔器滑翔状态机翼水动力特性
2010-06-07武建国陈超英王树新张宏伟王晓鸣
武建国,陈超英,王树新,张宏伟,王晓鸣
混合驱动水下滑翔器滑翔状态机翼水动力特性
武建国,陈超英,王树新,张宏伟,王晓鸣
(天津大学机械工程学院,天津 300072)
将水下滑翔器和水下自航行器两者功能集合于一身,提出了一种新概念混合驱动水下滑翔器.采用计算流体力学方法对混合驱动水下滑翔器滑翔状态下机翼对滑翔经济性和稳定性的影响进行了数值模拟研究.正交试验表明,其滑翔经济性受机翼弦长影响最为显著;滑翔器的稳定性受机翼的后掠角影响最为显著;对4个具体模型在0°~20°攻角的进一步的数值模拟表明,机翼的位置主要影响滑翔稳定性,对滑翔经济性影响较小.滑翔器在6°左右攻角航行时,具有最大的升阻比.研究为混合驱动水下滑翔器的设计提供了理论指导和参考.
混合驱动水下滑翔器;计算流体力学;滑翔经济性;稳定性;水动力学
水下滑翔器又称水下滑翔机器人或水下滑翔机,是一种利用浮力驱动的新型水下无人航行器,主要用于海洋环境测量.水下滑翔器续航能力大、噪音小、成本低,因此具有重要的军事价值[1].目前研制成功的水下滑翔器主要有3种[2-5]:Webb公司生产的Slocum滑翔器、华盛顿大学设计的Seaglider滑翔器以及Scripps海洋研究所研制的Spray滑翔器.这3种滑翔器的航程都超过了2,000,km,水下续航时间达到几百天,甚至近1年[5].然而,由于采用浮力驱动,水下滑翔器在水下只能做锯齿形轨迹航行,其航迹精度和定位精度低,航速慢,在风浪较大的海面可能会出现随波逐流的情况.
水下自航行器[6-8](autonomous underwater vehicle,AUV)一般采用螺旋桨推进,具有较高的航迹定位精度和较快的航速,且可以做任意轨迹的航行.然而由于功耗大且受能源的制约,AUV的航程很短,一般在几十千米到几百千米.
基于上述分析,将大续航能力、高机动性以及高定位精度等性能集于一身,设计一种以滑翔为主同时具有浮力驱动和螺旋桨驱动的混合驱动的水下滑翔器是一个积极而有益的探索[8-9].混合驱动水下滑翔器在滑翔状态下主要关注滑翔经济性和稳定性,而在螺旋桨驱动下更为关注航行的机动性.其中机翼对滑翔经济性和稳定性有关键性的影响,研究机翼在滑翔状态下的水动力特性是设计的关键,也是螺旋桨驱动下机动性研究的基础.
航行器设计初期,水动力学参数主要通过模型试验和数值模拟两种方法获取[10],其中模型试验耗资巨大,试验周期长,尤其是在初步选型阶段,设计人员需要对一系列方案进行比较,模型试验的弊端显而易见.随着计算机硬件和软件技术的发展,采用数值模拟进行初期的水动力学参数计算已成为可能[11];且用数值模拟完成新设计所需时间短、成本小,比试验研究更自由、灵活,可以无限量地提供研究结果的细节,便于优化设计;具有重复性好、条件容易控制等优点.
笔者采用计算流体力学(computational fluid dynamics,CFD)的方法,在保持滑翔器主体与舵尺寸不变的情况下,通过改变NACA0010机翼的弦长、展弦比、后掠角以及机翼的位置,对滑翔器滑翔状态下的滑翔经济性和稳定性进行了4因素、3水平的正交模拟试验;并在正交试验基础上,进一步研究了4个具体模型在0°~20°攻角下的水动力性能.
1 数值计算方法
1.1数学模型的建立
混合驱动水下滑翔器计算模型如图1所示,图中坐标原点位于航行器机身纵轴的中心点.该模型是在滑翔器基础上增加螺旋桨和尾舵构成的.滑翔器采用滑翔方式实现低速、长距离运动,而在螺旋桨驱动下实现短期定深、快速航行以及转向等机动动作.滑翔器主体外壳直径为0.25,m,长径比为10;模型选用3叶B型、直径为0.2,m、盘面比为0.35的螺旋桨;滑翔器尾舵平均弦长为0.15,m,展弦比为1.72;舵距中心的距离为1.0,m.别,雷诺数的定义为
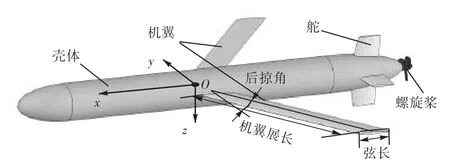
图1 混合驱动水下滑翔器模型Fig.1 Hybrid-driven underwater glider model

式中:ρ为流体密度;v为流体运动速度;L′为流动特征尺度;μ为流体动力黏性系数.对于外流场,转捩点大约发生在Re<106,当雷诺数Re<5×105时,则一定为层流边界层;而Re>2×106则是湍流边界层或者湍流流动占主要部分[12-14].混合驱动水下滑翔器在两个不同航速下对应的雷诺数如表1所示.由于设计的混合驱动水下滑翔器在两个航速情况下雷诺数都已超过临界雷诺数,故模拟采用湍流模型进行.模拟时假定流体为不可压缩连续性介质,控制方程组为描述牛顿流体的连续方程及N-S方程[10-11],湍流方程采用RNG k-ε 模型[15].

表1 不同航行模式下雷诺数ReTab.1 Re in different sail modes
1.2网格划分及边界条件
网格划分时采用尺寸函数与非结构化网格的方法相结合,这样既可以保证整体网格疏密的合理分布,又可以使网格的生成方法简单方便.航行器尾部网格划分如图2所示.
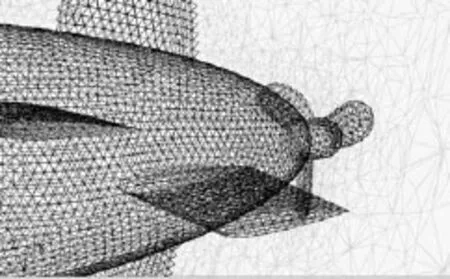
图2 混合驱动水下滑翔器尾部网格划分Fig.2 Mesh generation on the tail of hybrid-driven underwater glider
计算采用的边界条件有4个.
(1)速度入口边界条件:距离物体头部1.1倍航行器长度处,取速度入口条件.
(2)出口边界条件:出口边界设置于离航行器尾1.1倍长度处,取自由出流条件.
(3)固壁边界条件:航行器所有壁面均设定为静止无滑移壁面,壁面粗糙度取为0.
(4)池壁边界条件:无滑移壁面.
1.3模型的验证
为验证数值计算的准确性,按照上述方法计算的Slocum滑翔器[5]在不同攻角下的阻力系数和文献[16]中的试验数据对比如表2所示.表3为实验室设计的AUV光壳体在不同航行速度下阻力的数值计算值和试验数据的对比结果.由表2和表3可见,计算结果和试验结果相近,最大误差不超过9.35%,验证了数值计算的可靠性.
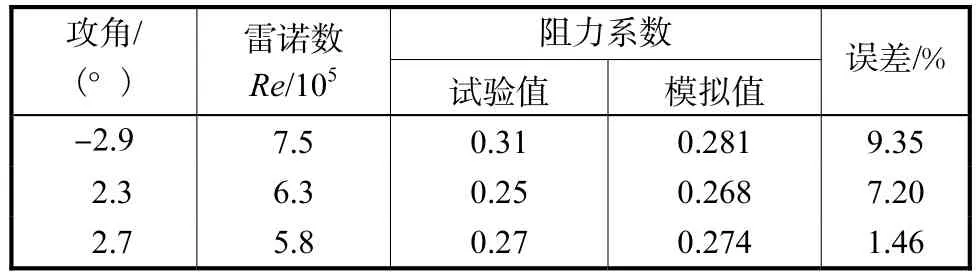
表2 阻力系数CD数值模拟结果验证Tab.2 Verification of numerical simulation results of CD
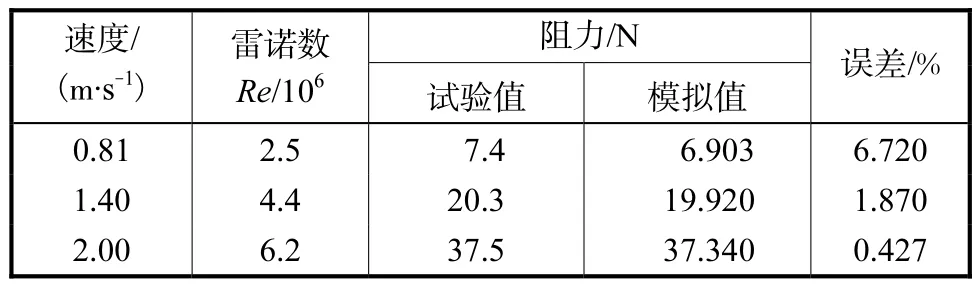
表3 AUV光壳体阻力数值模拟结果验证Tab.3 Verification of numerical simulation resultsof drag of AUV shell
2 正交模拟试验的建立与分析
2.1正交因素与水平
在以上数值计算方法可靠的基础上,对主体尺寸相同的情况下改变NACA0010机翼弦长、展弦比、后掠角和机翼根部中心距滑翔器中心位置,在攻角α=6°、航速为0.5m/s的情况下进行了4因素3水平的正交数值模拟试验,其中机翼位置是指机翼中心点到滑翔器机身坐标中心点之间的距离,方向按照图1所示的坐标取定.设计正交表为L18(37).试验因素和因素水平如表4所示.
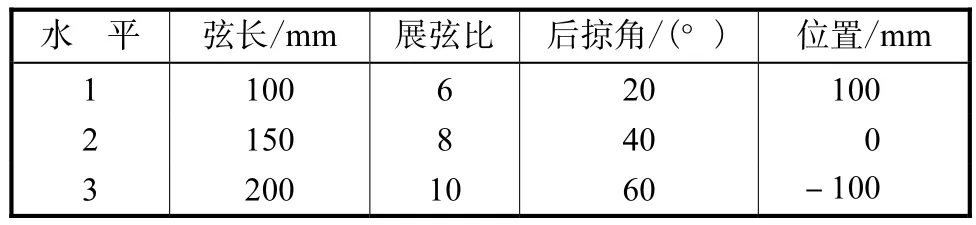
表4 正交试验表Tab.4 Orthogonal experiment table
2.2分析指标
为确定机翼对滑翔经济性以及稳定性的影响,滑翔经济性由滑翔器的升阻比L/D来评价[17-19],升阻比越大,滑翔经济性越高;水下滑翔器一般设计为静稳定的[16],滑翔器的静稳定性可以用无因次水动力中心臂lα′作为判据[20-21],


式中:l为滑翔器长度;Mα为由于攻角α产生的水动力力矩;Lα为由于攻角α产生的升力.当0lα′>时,攻角增量αΔ产生的力矩使得αΔ继续增大,这种情况称为静不稳定;当0lα′=时,αΔ不会产生力矩增量,称为中性稳定或临界稳定;当0lα′<时,αΔ产生的力矩使得滑翔器向原位置回转,这种情况称为静稳定.
本文分析中,滑翔经济性仅从水动力学角度进行探讨,至于机翼水动力和静稳定性对滑翔经济性的耦合影响在这里暂不进行讨论.
2.3影响因素分析
正交试验结果如表5所示.
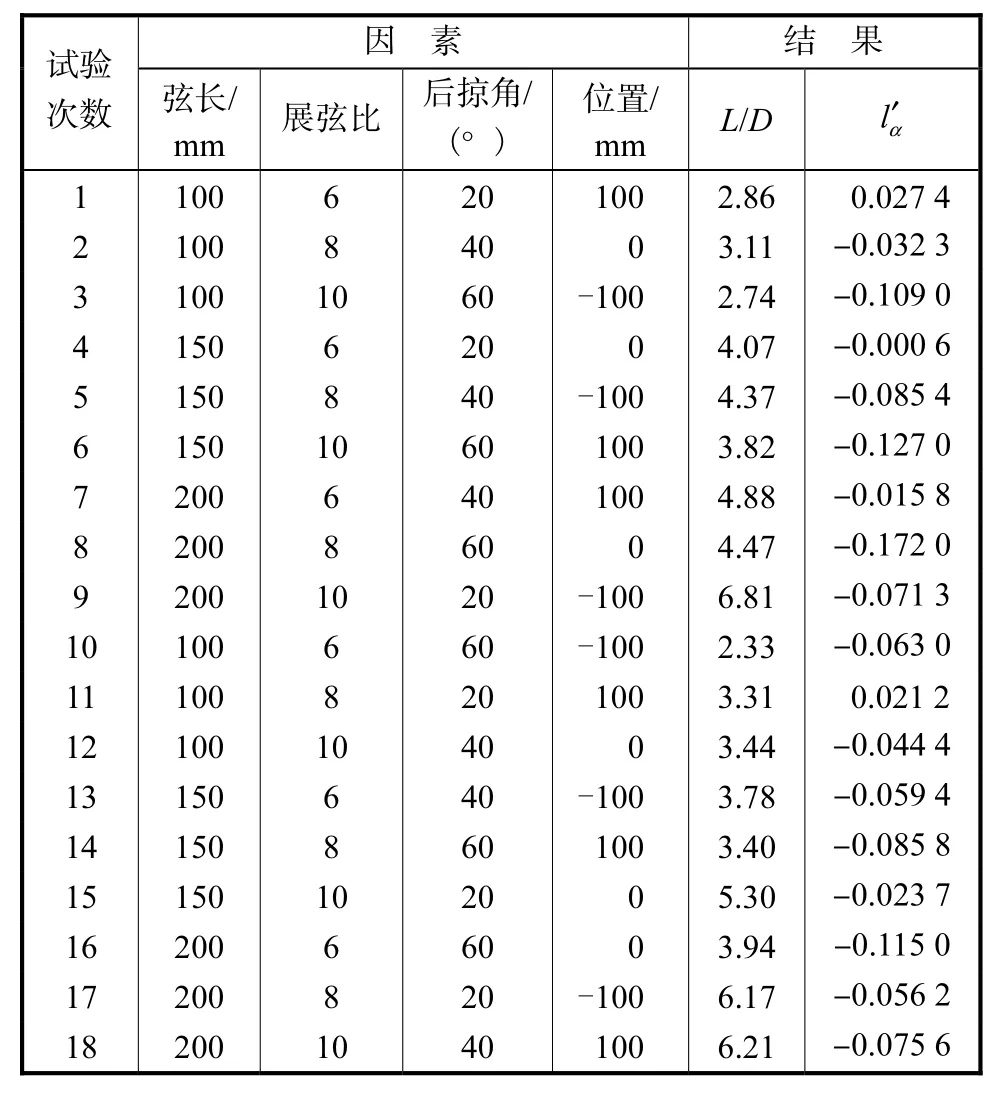
表5 正交表L18(37)及试验结果Tab.5 Orthogonal table L18(37)and experimental results
图3和图4分别为4因素对L/D和lα′的影响趋势.由图可知,L/D随着弦长、展弦比的增加而增加,而随着后掠角的增大而下降,L/D与机翼位置关系不大.当机翼位于水动力焦点之后时,lα′随着弦长、展弦比和后掠角的增加而减小,即稳定性增加,机翼的位置越靠后其稳定性越高.
采用极差分析法对结果分析可知,机翼弦长、展弦比、后掠角和位置对L/D的极差分别是2.448、1.077、1.303和0.312.可见,各因素对L/D影响的重要性排序依次为弦长、后掠角、展弦比和位置.由方差分析可知,弦长在显著性水平0.10与0.05上对指标L/D的影响是显著的.
同样,对指标lα′进行极差分析可知,机翼弦长、展弦比、后掠角和位置对指标lα′的极差分别是0.051、0.037、0.095和0.031.可见,各因素对lα′影响重要性排序依次为后掠角、弦长、展弦比和位置.由方差分析可知,后掠角在显著性水平0.10与0.05上对lα′的影响是显著的.

图3 L/D变化趋势Fig.3 L/D trend of change
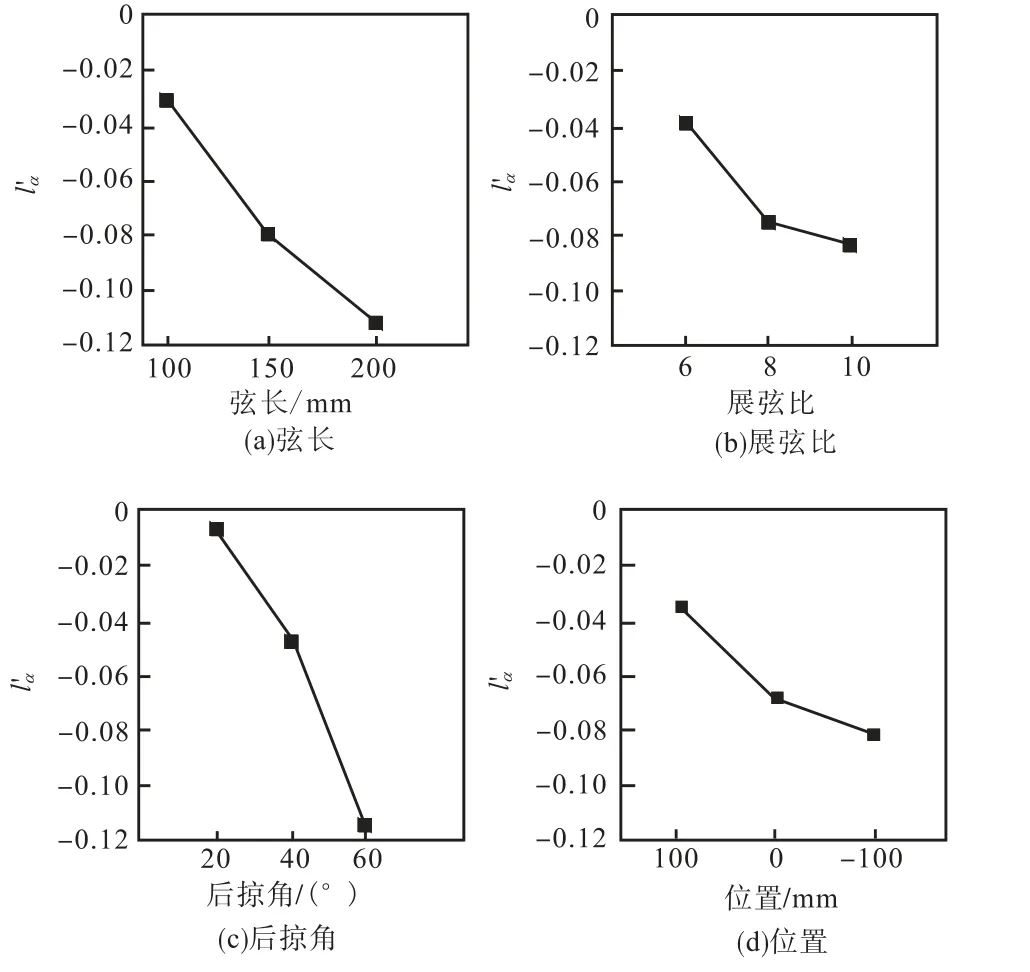
图4 lα′变化趋势Fig.4 lα′trend of change
由上述分析可知,在滑翔状态下,为提高滑翔经济性应尽量增加机翼的弦长和展弦比,同时减小机翼的后掠角;但为提高航行器的稳定性,又需要增大机翼的后掠角以及将机翼后移来实现.可见,增加机翼后掠角对提高滑翔器滑翔经济性和增加稳定性这两方面是矛盾的,设计需要时根据其他性能要求来选择.
3 具体模型分析
为进一步研究在不同航行攻角下机翼对L/D和lα′的影响以及其舵、螺旋桨对滑翔状态的影响,对表6所示的4个具有不同机翼参数的具体模型进行了航速为0.5 m/s、攻角为0°~20°的数值模拟.依据正交试验结果和指标-因素分析,表6中模型1具有最大的滑翔经济性和最高的滑翔稳定性.为分别比较机翼位置、展弦比以及弦长对上述两个指标在不同攻角下的影响,在固定后掠角的情况下分别依次改变机翼位置、展弦比以及弦长提出了模型2、模型3和模型4,具体模型参数如表6所示.图5为6°攻角下模型3的表面压力分布云图.各模型其他参数的模拟结果比较如图6~图9所示.
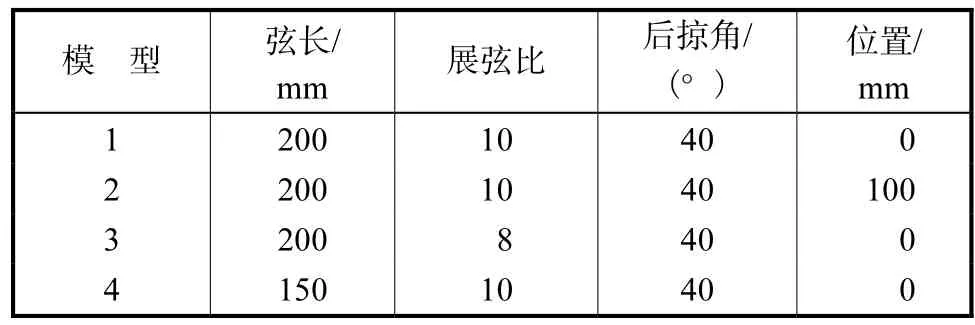
表6 具体模型参数Tab.6 Parameters of specific models
图5 模型3压力分布云图Fig.5 Pressure distribution of model 3
由图6和图7中模型1和模型2曲线可知,机翼的位置对L/D的影响很小,即对滑翔经济性影响较小,但将机翼位置向尾部移动造成模型2的lα′显著减小,这使得滑翔器的稳定性增加.由模型3和模型4曲线可知,减小展弦比和弦长都会减小滑翔器的L/D,同时使lα′增大;但减小弦长更为显著地减小了滑翔器的L/D,但两者稳定性相差不大.由图6可知,当攻角在6°左右时具有最大的升阻比,故在6°左右攻角时具有较高的滑翔经济性.
在滑翔状态下,混合驱动水下滑翔器相对于经典水下滑翔器增加了舵和螺旋桨的阻力,这部分阻力会减小滑翔状态下的航程.螺旋桨和舵占总体航行器的阻力比例如图8所示,这个比例由于攻角不同而有所不同,其值大约在10%~35%,这意味着其航程会比单纯滑翔器减小10%~35%.图9为混合驱动水下滑翔器滑翔状态下的极曲线.由图可见,在小阻力的情况下,模型3和模型4反而比模型1和模型2能获得更大的升力;而当阻力增加时,模型1和模型2获得的阻力明显增加.由于滑翔器的阻力最终被浮力驱动系统提供的静浮力B克服,且存在Bsin θ=D,式中θ为滑翔角,故为获得最大的升力,其机翼的选择还应参考滑翔器能提供的净驱动浮力以及相应滑翔角来确定.
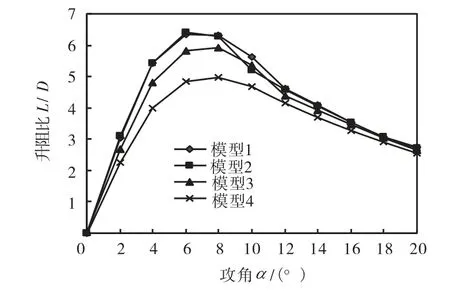
图6 L/D随攻角的变化关系Fig.6 Relationship between L/D and attack angle
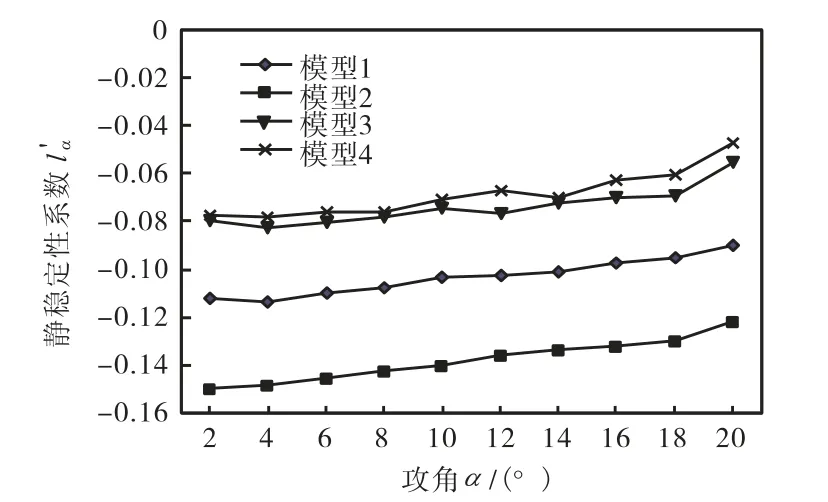
图7 α′l随攻角的变化关系Fig.7 Relationship between lα′ and attack angle
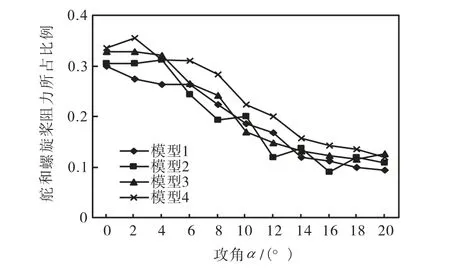
图8 舵和螺旋桨阻力占总阻力的比例随攻角变化曲线Fig.8 Attack angle dependence of the proportion of rudder and propeller resistance to total resistance

图9 4模型的极曲线Fig.9 Drag polar features for four models
4 结 论
(1)本文所采用的数值模拟方法计算结果与试验值吻合较好,能满足工程设计和研究的要求.
(2)机翼弦长对滑翔状态下的滑翔经济性影响最为显著,而后掠角对稳定性的影响最为显著;机翼位置对滑翔经济性的影响较小,主要影响滑翔稳定性,位置越靠后稳定性越高;当机翼位于水动力中心后方时,增加机翼的弦长和展弦比能同时提高滑翔状态下的滑翔经济性和稳定性,但受机械结构限制.
(3)当滑翔器在6°左右攻角航行时,具有最大的升阻比;笔者设计的混合驱动水下滑翔器由于螺旋桨和舵的存在,滑翔状态下阻力会增加约10%~35%.
[1] Rudnick D L,Davis R E,Eriksen C C,et al. Underwater glider for ocean research [J]. Marine Technology Society Journal,2004,38(1):48-59.
[2] Webb D C,Simonetti P J,Jones C P. SLOCUM:An underwater glider propelled by environmental energy [J]. IEEE Journal of Oceanic Engineering,2001,26(4):447-452.
[3] Eriksen C C,Osse T J,Light R D,et al. Seaglider:A long range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering,2001,26(4):424-436.
[4] Sherman J,Davis R E,Owens W B,et al. The autonomous underwater glider “Spray”[J]. IEEE Journal of Oceanic Engineering,2001,26(4):437-446.
[5] Davis R E,Eriksen C E,Jones C P. The Technology and Applications of Autonomous Underwater Vehicles[M]. Griffiths G ed. London:Taylor and Francis,2002.
[6] 蒋新松,封锡盛,王棣棠. 水下机器人[M],沈阳:辽宁科学技术出版社,2000.
Jiang Xinsong,Feng Xisheng,Wang Ditang. Unmanned Underwater Vehicles[M]. Shenyang:Liaoning Science and Technology Publishing House,2000(in Chinese).
[7] Ikuo Yamamoto. Research and Development of Past,Present,and Future AUV Technologies [EB/OL]. http:// www. noc. soton. ac. uk/CASEE/CASEE2/pages/ Masterclass/R&D%.20past%.20present%20.future%20.AUV.% 20tech-2. pdf,2008-11-20.
[8] Rudnick D L,Perry M J. ALPS:Autonomous and Lagrangian Platforms and Sensors[R]. La Jolla,California:The ALPS Workshop Report,2003.
[9] Bachmayer R,Leonardy N E,Graver J,et al. Underwater gliders:Recent developments and future applications [C]// Proc IEEE International Symposium on Underwater Technology(UT'04). Taipei,Taiwan,China,2004:195-200.
[10] 张怀新,潘雨村. CFD在潜艇外形方案比较中的应用[J]. 船舶力学,2006,10(4):1-8.
Zhang Huaixin,Pan Yucun. Application CFD to compare submarine hull forms[J]. Journal of Ship Mechanics,2006,10(4):1-8(in Chinese).
[11] Tyagi A,Sen D. Calculation of transverse hydrodynamic coefficients using computational fluid dynamic approach[J]. Ocean Engineering,2006,33(5/6):798-809.
[12] 石秀华. 水中兵器概论:鱼雷部分[M]. 西安:西北工业大学出版社,1995.
Shi Xiuhua. Conspectus of Submerged Weapon:Torpedo Section[M]. Xi’an:Northwestern Polytechnical University Press,1995(in Chinese).
[13] 李万平. 计算流体力学[M]. 武汉:华中科学大学出版社,2004.
Li Wanping. Computational Fluid Dynamics[M]. Wuhan:Huazhong University of Science and Technology Press,2004(in Chinese).
[14] 吴望一. 流体力学(下册)[M]. 北京:高等教育出版社,1982. Wu Wangyi. Fluid Mechanics(Volume II)[M]. Beijing:Higher Education Press,1982(in Chinese).
[15] 何漫丽. 水下自航行器水动力学特性数值计算与试验研究[D].天津:天津大学机械工程学院,2005.
He Manli. Studying on Hydrodynamic Characteristics of AUV with Numerical Model and Experiments[D]. Tianjin: School of Mechanical Engineering,Tianjin University,2005(in Chinese).
[16] Graver J G. Underwater Gliders:Dynamics,Control and Design[D]. USA:Department of Mechanical and Aerospace Engineer,Princeton University,2005.
[17]Jenkins S A,Humphreys D E,Sherman J,et al. Alternatives for enhancement of transport economy in underwater gliders[C]// IEEE Proceedings of OCEANS. La Jolle,Calofornia,2003:948-950.
[18] Jenkins S A,Humphreys D E,Sherman J,et al. Underwater Glider System Study [R]. USA:Office of Naval Research,2003.
[19] 马冬梅,马 峥,张 华,等. 水下滑翔机水动力性能分析及滑翔姿态优化研究[J]. 水动力学研究与进展(A辑),2007,22(6):703-708.
Ma Dongmei,Ma Zheng,Zhang Hua,et al. Hydrodynamic analysis and optimization on the gliding attitude of the underwater glider[J]. Journal of Hydrodynamics(Ser A),2007,22(6):703-708(in Chinese).
[20] Wu Baoshan,Xing Fu,Kuang Xiaofeng,et al. Investigation of hydrodynamic characteristics of submarine moving close to the sea bottom with CFD methods[J]. Journal of Ship Mechanics,2005,9(3):19-28.
[21] 施生达. 潜艇操纵性[M].北京:国防工业出版社,1995.
Shi Shengda. Submarine Maneuverability[M]. Beijing:National Defense Industry Press,1995(in Chinese).
Hydrodynamic Characteristics of the Wings of Hybrid-Driven Underwater Glider in Glide Mode
WU Jian-guo,CHEN Chao-ying,WANG Shu-xin,ZHANG Hong-wei,WANG Xiao-ming
(School of Mechanical Engineering,Tianjin University,Tianjin 300072,China)
A novel hybrid-driven underwater glider(HUG)combining the advantages of underwater glider and autonomous underwater vehicle (AUV) has been proposed in this paper. Numerical simulation has been conducted to investigate the impact of the wings on the glide efficiency and stability of HUG in glide mode using computational fluid dynamics(CFD).The orthogonal experiment shows that glide efficiency is most significantly influenced by the chord lengthwhile stability of the vehicle is most remarkably affected by the sweep angle. Further numerical calculations based on four specific models with the attack angle in the range of 0°—20°indicate that location of the wings mainly affects glide stability yet has little influence on glide efficiency. When the vehicle glides at about 6°attack angle it has the maximum ratio of lift to drag. The study provides theoretical guidance and reference for HUG design.
hybrid-driven underwater glider;computational fluid dynamics;glide efficiency;stability;hydrodynamics
TV131.2;TP242
A
0493-2137(2010)01-0084-06
2008-12-01;
2009-06-03.
国家自然科学基金资助项目(50705063;50835006).
武建国(1980— ),男,博士研究生.
武建国,wjg_b518@163.com.
