一种考虑精度和效率的微运动测量算法
2010-05-30卢清华张宪民范彦斌
卢清华 张宪民 范彦斌
1.佛山科学技术学院,佛山,528000 2.华南理工大学,广州,510640
0 引言
微纳制造技术的高速发展给计量科学和计量仪器提出了新的测量任务,测量精度提高到纳米级甚至亚纳米级[1]。在设计开发MEMS时,系统功能主要是通过微结构的微小位移和变形来实现的,因此对MEMS的微小位移和速度等微运动的测量成为开发MEMS的关键[2]。此外,纳米级精度微位移检测技术也是研究纳米级精密工作台的关键技术之一[3]。因此,研究高精度的微运动测量方法对研究微纳制造技术具有重要的意义。
微运动测量技术近年来取得了长足的进步,研究者们提出了许多测量微运动的运动估计算法[4-10]。基于梯度的运动估计算法在微运动测量中得到了广泛的应用。Timoner等[4]设计了一种基于梯度的多图像微运动测量方法。该方法在测量小于1个像素的硅微机械运动时,精度达到了纳米级。卢清华等[8]设计了一种鲁棒多尺度微运动测量方法,该方法与计算机微视觉相结合能够测量纳米级精度的微运动。然而,研究者们在设计上述微运动测量方法时,大多数只考虑了算法的精度,并没有考虑算法的效率。在实际应用中,无论一种微运动测量算法多么精确,除非它能够在规定的响应时间内完成微运动测量,否则该算法是没有用的。因此,实际应用中的微运动测量算法,必须同时考虑其精度和效率[11]。
本文同时考虑算法的精度和效率,设计了一种基于梯度的微运动测量算法。根据微运动测量算法的精度和效率性能评估准则,通过设置算法的不同参数,找到总体性能表现较好的微运动测量方法。
1 考虑精度和效率的微运动测量算法
1.1 基于梯度的运动估计算法
基于梯度的运动估计算法[4,7-8]一般都是根据常亮度假设[12]提出的。根据这种假设有

通过计算多个不同位置的图像梯度,式(1)转化为一个有两个未知量d x和d y的超约束方程组。为了简化,采用 Ix、Iy及It分别表示图像梯度则利用最小二乘法求解该方程组有

式(2)中,在所有的i、j及t范围内求解 d x和d y的值,其中,i=1,2,…,M-1;j=1,2,…,N-1,M×N表示测量图像的最大像素数。
从式(2)可以看出,只要找到图像的梯度,就可以求得d x和d y的值。最初,人们一般采用一阶微分的方法计算图像的梯度[12],但是该方法的运动估计精度不高。为了提高测量精度,将微运动测量看成是信号处理问题,采用滤波器方法计算图像的梯度[4,7-8]。采用该方法,图像任意位置处的梯度可以使用滤波器对图像的行和列分别进行卷积得到

式中,I1(x,y,t)和I2(x,y,t)为两幅相邻测量图像的亮度函数;g表示微分滤波器;h表示插补滤波器;*表示卷积。
式(3)表明,只要选取合适的滤波器,就可以很快地计算图像的梯度进而估计d x和d y的值。此外,采用多尺度方法,可以进一步提高微运动测量算法的测量精度[7-8]。
基于梯度的微运动测量算法中,研究者们只考虑了算法的精度,并没有考虑算法的效率。本文根据微运动测量算法的性能评估准则,采用同时考虑算法精度和效率的微运动测量算法测量微运动。
1.2 微运动测量算法的精度和效率评估
评估一种实际应用中的运动估计算法,必须同时考虑算法的精度和效率[11]。在文献[13]中,同时考虑算法的精度和效率,提出了一种评估基于梯度运动估计算法总体性能的偏差-时间曲线图方法。在该评估方法中,以测量偏差作为算法的精度性能准则,以算法的执行时间表征算法的效率,通过设置运动估计算法的不同参数值绘制评估算法性能的偏差-时间曲线。对于基于梯度的运动估计算法,这些参数一般是指用于预平滑处理或用于计算图像梯度的滤波器的抽头数。对一些复杂的运动估计算法,可能还需要考虑其他参数。此外,该性能曲线中的算法偏差和执行时间是在相同条件下得到的。
图1给出的是微运动测量算法用于测量某一微运动时的性能评估曲线示例。如图1所示,x轴表示算法用于测量某一特定运动时偏差的绝对值,y轴表示算法的相应执行时间。性能评估图中的性能点离原点越近,即对应着算法的偏差越小或执行时间越短,则该算法的性能越好。算法1的测量精度大于算法2的测量精度,但是算法2的性能点离原点更近,也就是算法2的总体性能好于算法1。这意味着,如果同时考虑算法的精度和效率,则一种测量算法的精度越高并不能保证其总体性能越好。在图1中,通过设置算法3的不同参数绘制了该算法的性能评估曲线。算法3在A点处的估计性能好于算法B点和C点处的性能。
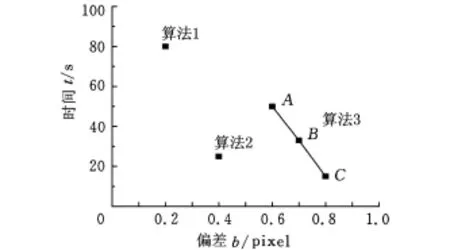
图1 微运动测量算法性能评估示例
采用基于梯度的微运动测量算法测量微运动时,根据评估算法总体性能的偏差-时间曲线,选取用于计算测量图像梯度的滤波器抽头数和用于改善测量精度的多尺度方法的尺度层数,进行微运动测量。这种将算法的性能评估和基于梯度的算法相结合的方法用于微运动测量时,不仅考虑了算法的精度,而且考虑了算法的效率。
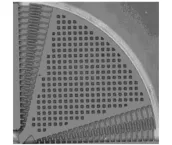
图2 测试图像
2 实验模拟与分析
在实验模拟中,为了验证提出的同时考虑了精度和效率的微运动测量方法的性能,将一幅256×256个像素的MEMS硅微机械光学显微镜图像作为测试图像,如图2所示[14]。在实际应用中,图像都会受到噪声污染,为了验证提出的算法测量噪声图像时的性能,在仿真时将测试图像加入均值为0、标准差为0.003 15的高斯噪声[4]。在所有实验模拟中,未经特殊说明的仿真结果报告的偏差均为平移运动测量偏差的绝对值。所有测试均为dx=dy时的运动估计结果,此时的运动估计偏差最大[15]。此外,所有算法均在Pentium Dual 2.20GHz、内存2GB的台式机上实现。
图3给出的是只考虑精度的微运动测量算法测量偏差的对比。在图 3中,5-Farid和7-Farid分别表示采用5抽头Farid滤波器[16]和7抽头Farid滤波器并根据式(3)计算梯度的微运动测量方法。M 3-5-Farid表示5抽头Farid滤波器和3层高斯金字塔多尺度迭代方法相结合的微运动测量方法,M 3-7-Farid表示7抽头Farid滤波器和3层高斯金字塔多尺度迭代方法相结合的微运动测量方法。从图3可以看出,只考虑微运动测量算法的精度时,用于计算图像梯度的滤波器抽头数越大,算法测量偏差越小。特别地,采用多尺度方法,测量算法的精度得到了很大的提高。图3显示的结果也表明,M3-5-Farid方法和M 3-7-Farid方法的测量偏差相接近。这是由于5抽头和7抽头的Farid滤波器在测量小运动时精度相近,而多尺度方法是将大运动分解为多个小运动进行测量的,于是测量图像采用多尺度方法分解后,5抽头和7抽头滤波器测量的运动均较小,于是这两种方法的测量偏差几乎相同。

图3 不同方法的测量偏差比较
图4 是图3所示方法的偏差-时间性能图。在图4中,表征精度性能的偏差为指定平移范围内所有偏差绝对值的总和,算法的执行时间取指定平移范围内使用MATLAB 7.0估计所有平移运动的总时间。从图4可以看出,7-Farid方法的性能点离性能图的原点最近,总体性能表现最好。5-Farid方法的执行时间最短,但是其总偏差最大。M3-7-Farid方法的总偏差最小,而执行时间最长。这意味着,如果同时考虑算法的精度和效率,精度最高的微运动测量算法的总体性能并一定最好。图4表明,M 3-5-Farid方法和M3-7-Farid方法与原点的距离相接近,这两种方法的总体性能表现相类似。但是,M3-7-Farid方法的总偏差略小于M3-5-Farid方法,在实际应用中,更趋向于采用M3-7-Farid方法用于微运动测量。

图4 不同测量方法的总体性能比较
图5 给出的是不同多尺度方法的总体性能比较。在图5中,偏差和时间的含义与图4中的相同。其中,M5-7-Farid表示7抽头Farid滤波器和5层高斯金字塔多尺度迭代方法相结合的微运动测量方法。从图5可以看出,采用3层多尺度方法的M 3-7-Farid方法性能点与原点的距离比采用5层多尺度方法的M 5-7-Farid方法性能点到原点的距离小很多,也就是M3-7-Farid方法的总体性能明显好于M 5-7-Farid方法。虽然采用5层多尺度方法的精度相对于3层多尺度方法得到了一定的提高,但是相应地大幅度增加了算法的执行时间。如果同时考虑算法的精度和效率,这种大量牺牲微运动测量算法的效率而提高精度的方法并不适合于实际应用。综上所述,同时考虑算法的精度和效率,采用7抽头Farid滤波器计算图像的梯度并结合3层金字塔多尺度迭代方法的M 3-7-Farid算法是一种总体性能表现较好的微运动测量方法。此外,图5表明了该方法在测量大约2个像素的MEMS硅微机械光学显微镜图像时,最大测量偏差小于0.025个像素。

图5 不同多尺度测量方法的总体性能比较
3 结束语
同时考虑算法的精度和效率,结合基于梯度的运动估计方法,提出了一种总体性能表现较好的微运动测量方法。在设计该微运动测量方法时,根据算法的偏差-时间性能评估曲线,选取测量算法的合适参数(如滤波器抽头数或多尺度方法的尺度层数),找到总体性能表现较好的微运动测量方法。分析表明,设计基于梯度的微运动测量算法时如果同时考虑精度和效率,则增加用于计算梯度的滤波器的抽头数或多尺度方法的尺度层数并不一定能提高算法的总体性能。此外,实验模拟表明了提出的微运动测量方法不但总体性能表现较好,而且在测量大约2个像素的MEMS微运动图像时最大测量偏差小于0.025个像素。
[1] 蒋庄德,徐通模.微纳制造技术及微系统的发展现状、趋势及展望[R/OL].装备制造(电子版),2006,2.[2009-12-22].http://www.chinaem.cn/dzkw/06-2/12.htm.
[2] 王涛,王晓东,王立鼎,等.MEMS中微结构动态测试技术进展[J].中国机械工程,2005,16(1):83-88.
[3] 卢秉恒.微纳制造[R].北京:国家自然科学基金委员会,2004.
[4] Timoner S J,Freeman D M.Multi-image Gradient-based Algorithms for Motion Estimation[J].Opt.Eng.,2001,40(9):2003-2016.
[5] Gupta N,Kanal L.Gradient Based Image Motion Estimation without Computing Gradients[J].International Journal of Computer Vision,1997,22(1):81-101.
[6] Davis C Q,Freeman D M.Statistics of Subpixel Registration Algorithms Based on Spatiotemporal Gradients or Block Matching[J].Opt.Eng.,1998,37(4):1290-1298.
[7] Lu Q H,Zhang X M.Multiscale MSE-minimizing Filters for Gradient-based Motion Estimation[J].Measurement,2007,40:841-848.
[8] 卢清华,张宪民,范彦斌.基于计算机微视觉的鲁棒多尺度平面微运动测量[J].机械工程学报,2009,45(2):164-169.
[9] 陈治,胡晓东,傅星,等.基于块匹配的MEMS平面纳米精度运动测量[J].光学精密工程,2008,16(3):505-509.
[10] 白金鹏,史铁林,谢勇君,等.基于频闪干涉的微结构三维运动测量方法[J].测控技术,2008,27(6):5-8.
[11] Liu H C,Hong T H,Herman M,et al.Accuracy vs Efficiency Trade-offs in Optical Flow Algorithms[J].Computer Vision and Image Understanding,1998,72(3):271-286.
[12] Horn B K P,Schunck B G.Direct Methods for Recovering Motion[J].International Journal of Computer Vision,1988(2):51-76.
[13] 卢清华,张宪民,范彦斌.一种运动估计算法的性能评估方法[J].工程图学学报,2009,30(5):113-118.
[14] Freeman D M,Alexander JA,Michael JG,et al.Multidimensional Motion Analysis Using Computer Microvision[R/OL].[2009-12-18].http://umech.mit.edu/freeman/talks/sssaw98/talk3.html.
[15] Robinson D,Milanfar P.Bias-minimizing Filters for Gradient-based Image Registration[J].Signal Processing:Image Communication,2005,20:554-568.
[16] Farid H,Simoncelli E P.Differentiation of Discrete Multidimensional Signals[J].IEEE Transactions on Image Processing,2004,13(4):496-508.
