基于MATLAB的时滞对象控制算法仿真分析
2010-05-29胡学军胡林文
胡学军,滕 达,胡林文
(1.武汉工程大学电气信息学院,湖北 武汉 430074;2.华侨大学机电及自动化学院,福建 泉州 362021)
0 引 言
在冶金、化工、电力、轻工和机械等行业的工业过程控制中,由于物料或能量的传输延迟,大多数被控对象具有时滞性质.时滞会使系统产生较明显的超调量和较长的调节时间[1].几十年来,涌现出了大量对时滞过程的控制方法.本文从实际应用出发,选取了普通PI控制、smith预估控制、Dahlin控制、Dahlin-smith控制、Imc-smith控制、模型失配改进型smith预估控制等6种方法进行分析仿真研究,比较各种算法特点,寻找各种算法之间的联系,目的是能够对时滞现象的控制起到一定的帮助.控制对象取工业系统中常见的含有纯滞后的一阶惯性环节,纯滞后部分采用二阶pade近似.
1 时滞系统的控制方法
1.1 Smith预估控制器
Smith预估控制器是在PID调节回路上加入补偿回路,以抵消对象时滞因素的影响.Smith预估控制器的特点是预先估计出被控过程在扰动下的动态特性,然后用一个模型加到反馈控制系统中,力图使延迟了的被控量提前反映到控制器,使控制器提前动作[3],从而使系统的纯滞后明显地减少或降低,使系统的超调量和过渡时间有效地改善,提高系统的控制品质.但是Smith预估器在实际应用中仍有不尽人意的地方,主要表现在:1)必须精确地知道被控对象的数学模型,对于对象参数(增益,时滞)发生变化时,预估补偿效果不理想;2)对于大多数工业过程控制,模型不可能与实际生产过程完全一致,并且实际过程还受外界操作条件,环境等因素的影响,导致预估器结构很复杂,不易实现.
1.2 Dahlin-Smith控制器
Dahlin-Smith算法设计分两步:第一步对纯滞后对象设计smith预估器进行补偿,第二步按照Dahlin算法原理设计Dahlin-Smith控制器.为了分析方便,考虑系统无干扰且模型精确情况,T1=αT,τ1=τ,Gp(s)为不含纯滞后的对象部分,T为对象的时间常数;Gm(s)为对象模型非时滞部分,U(s)表示控制器输出,E(s)表示控制器输入.计算可得:

由结果可知,该控制器等效为一个带有滞后的PI控制器和一个预估器,通过调节α值来调节控制器的参数,从而来克服时滞对系统的影响.此算法的实质类似于Dahlin算法,它揭示了Dahlin算法和Dahlin-Smith算法之间潜在联系,即只要对Dahlin-Smith控制器进行合适的设计,就能完全实现Dahlin算法的控制功能.特别提出的是,模型精确时控制系统中的控制器参数τ1=τ,Dahlin-smith控制器的控制效果无异于Dahlin控制器,并且二者的传递函数也相同.
1.3 IMC-Smith控制器
Smith预估控制系统的内模控制结构[2]图如图1所示.定义内模控制器为

对象不含时滞部分传递函数为
Gp(s)=K/(Ts+1)
模型传递函数为
Gm(s)=K1/(T1s+1)
等效的内模控制器的的传递函数:
Gimc(s)=Gc(s)/[1+Gc(s)Gm(s)]
从而可得
Gc(s)=Gimc(s)/[1-Gimc(s)Gm(s)]

代入上式有

图1 Smith预估控制系统的内模控制结构图
由此可见,可以用一个PI控制器代替Smith预估器.当模型完全匹配时,仅在主控制器上构成闭环;当模型失配时,则系统的反馈信号Em(s)包含了误差信息和模型失配信息,可通过调节参数来提高闭环系统的稳定性和鲁棒性.IMC-smith控制与Smith 预估控制有很多相似之处,但它明显的优点是:可对被控制过程输出进行更长时域的预估,而不仅仅是时滞时间长度.
1.4 Smith预估器的一种改进结构
从闭环系统的特征方程角度来分析,Smith预估器的补偿原理就是通过预估项的补偿作用来消除特征方程中的纯滞后项,从而使被控过程的时滞部分排除在闭环控制回路之外,达到削弱时滞对整个控制的不利影响.由于适应各种控制系统和精度的要求,改善Smith预估器的各种方法大量出现[7].本文选用的方案是在原控制系统基础上增加一个合适的补偿器,控制方框图如图2所示.具体做法是将作为补偿器的输入用来构成反馈控制,这样可以及时将失配信息反馈到控制器,从而大大减少了时滞影响.
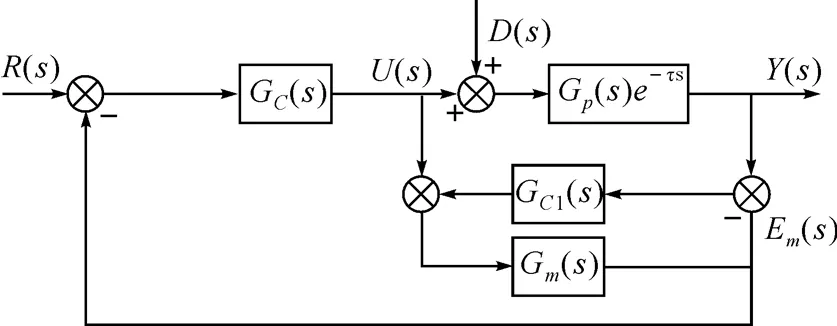
图2 一种改进的Smith预估器方框图
输出对给定输入的传递函数为
输出对扰动输入的传递函数
系统的特征方程为
当具备严格条件Gc1(s)模足够小,有
1+Gc1(s)Gp(s)e-τs≈1
1+Gc1(s)Gm(s)≈1
由此可得系统闭环特征方程可近似为
1+Gc(s)Gm(s)=0
由上式可知,系统的稳定性与补偿器无关,与对象的时滞部分也无关.
2 仿真参数设置
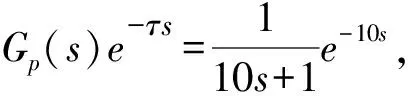
Dahlin控制器α=0.3
Dahlin-smith控制器α=1.5,τ1=15;Imc-smith控制器中的参数λ=35;改进的smith预估器经补偿器补偿后,补偿回路控制器的参数为Kp=0.8,Ki=0.05,主回路控制器参数保持不变.保持各自控制器和模型参数不变,改变被控参数对象,使得模型和对象失配,即
干扰输入为给定值的20%.用MATLAB对系统进行仿真,模型匹配和模型失配无干扰情况下的阶跃响应曲线和模型匹配和模型失配有干扰情况下的仿真曲线如图3所示.模型匹配Smith预估器,模型失配Smith预估器及模型失配改进型Smith预估器阶跃响应曲线如图4所示.
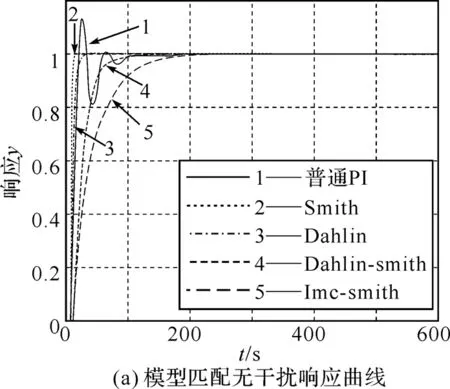

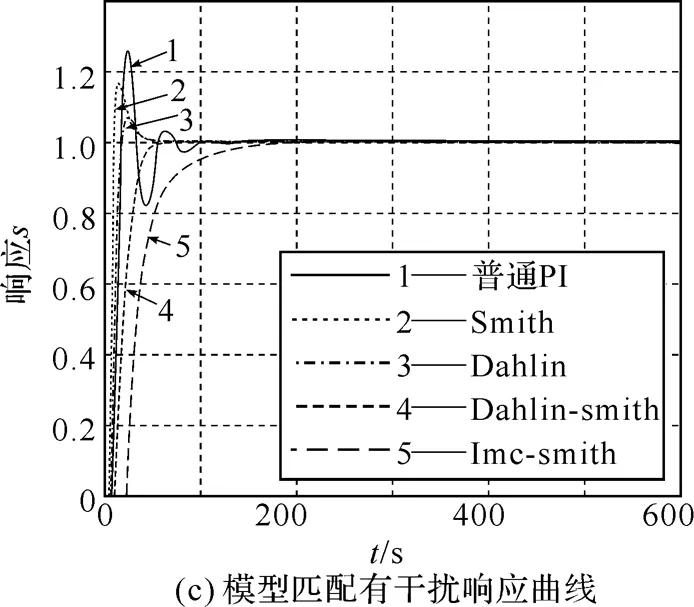
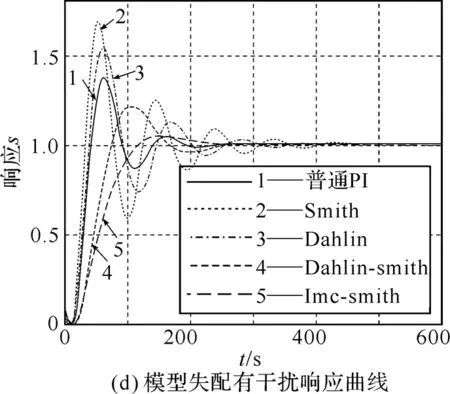
图3 仿真曲线
3 结果分析
由仿真结果可知,Smith预估器和普通PI相比,比例增益约扩大了9倍,积分时间缩小为原来的1/20,这表明控制作用有了明显加强.模型精确时,只有普通PI算法有超调量,同时将Dahlin控制器与Dahlin-smith控制器的控制品质相比较,Dahlin控制器的控制效果更好.Dahlin-smith控制器和Imc-smith控制器在模型匹配和模型失配时,控制效果都还不错,鲁棒性大大提高,系统抗干扰能力也显著增强.改进型Smith结构对阶跃输入和干扰方面,都表现了极佳的控制效果,特别是和Smith模型失配相比,系统改善了很多,同时干扰对其影响也很小,但是它只能适用于某些控制场合,不像Smith预估器那样广泛应用于各种场合.

图4 控制系统阶跃响应曲线
4 结 语
PI控制对滞后较大的对象不能得到满意的控制质量,甚至会引起振荡或不稳定,只适用于时滞短暂的系统.smith预估器对滞后过程能够提供很好的控制质量,但是它的控制品质对于模型误差(纯滞后时间和增益误差)非常敏感,特别在模型失配时,超调量过大,调节时间过长,不能适应快速控制场合.Dahlin-smith控制器和Imc-smith控制器响应速度较快,超调量小,在模型失配时,具有较强的鲁棒性和抗干扰能力,是克服纯滞后比较好的控制方法.改进型Smith预估器在系统模型失配很严重且受到干扰时,所得响应很理想,几乎接近模型完全匹配情况,且对模型参数变化的敏感度小,但缺点是对系统的参数有极其严格的限制条件.
参考文献:
[1]张峻颖,杨马英,谢启.含有纯滞后系统的控制方法[J].控制工程,2002,9(6):91-93.
[2]Smith O J. A Controller to Overcome Dead Time[J]. ISA,1959,6(2):28-30.
[3]崔士杰, 汪建华.基于MATLAB的单相全控整流电路功率因数测定[J].武汉工程大学学报,2010, 32(1): 90-93.
[4]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
[5]郑轲,孙一康.时滞过程控制算法分析[J].北京科技大学学报,2000,22(5):486-488.
[6]舒迪前.预测控制系统及其应用[M].北京:机械工业出版社,1996.
[7]宋云霞,朱学峰.大时滞过程控制方法及应用[J].化工自动化及仪表,2001,28(4):9-15.
[8]王树青.工业过程控制工程[M].北京:化学工业出版社,2002.