基于图像的人体参数测量系统的设计与实现*
2010-03-19吴壮志廖爽爽王春慧周诗华
吴壮志,廖爽爽,聂 磊,王 政,王春慧,周诗华
(1.北京航空航天大学计算机学院,北京 100191;2.中国航天员科研训练中心,北京 100094)
人体测量学是通过测量人体各部位的尺寸来确定个体之间和群体之间在人体尺寸上的差别,用以研究人的形态特征[1],从而为工业设计、人机工程、工程设计、人类学和医学研究等提供人体基础资料[2,3].世界上已有90多个大规模的人体测量数据库,主要分布在发达国家,例如,在美国和欧洲得到了广泛应用[4]的人体测量研究计划(Civilian American and European Survey of Anthropometry Research,CASER),日本HQL协会提出的人体测量和高质量生活工程(Research Institute of Human Engineering for Quality Life)计划[5]等.中国标准化研究院也于2005年开展了全国未成年人体测量项目,建立了全国未成年人体三维扫描数据库.
人体测量技术在近几十年的发展中,大致经历了由接触式到非接触式、由二维到三维的发展过程.非接触自动测量是现代化人体测量技术的发展趋势,它以现代光学为基础,结合图像处理、计算机视觉等技术,准确、高效、客观地获取人体尺寸参数数据,主要分为基于图像的二维非接触测量和基于结构光的三维非接触测量两类.加拿大的BoSS-2系统[6]就是一套基于图像的非接触式的人体参数测量和服装套号系统,为加拿大军队提供身体测量以实现制服的快捷、自动化生产.德国Human Solution公司开发的Vitus三维人体扫描仪[7]为典型的基于结构光的三维非接触人体测量设备,已经广泛应用于人体测量学和人机工效学等领域.
本文研究和实现了一套基于图像的人体参数测量系统,与BoSS-2系统相比,本文提出的测量方法能够识别更多的测量点,交互修改更方便,使得测量的人体参数项目更多,应用范围更广.
1 测量需求
本系统以航天医学工程所需的人体参数测量为背景,共测量人体7种姿势下的72个测量项目,涉及94个测量点,图1为7种姿势的示意图,包括4个立姿和3个坐姿.
表1列出了72个测量项目和94个测量点在各个测量姿势上的分布.例如测量项目“身高”通过立姿1进行测量,相关的测量点为“头顶点”和“地面点”.

图1 7种测量姿势Fig.1 Seven postures of measurement
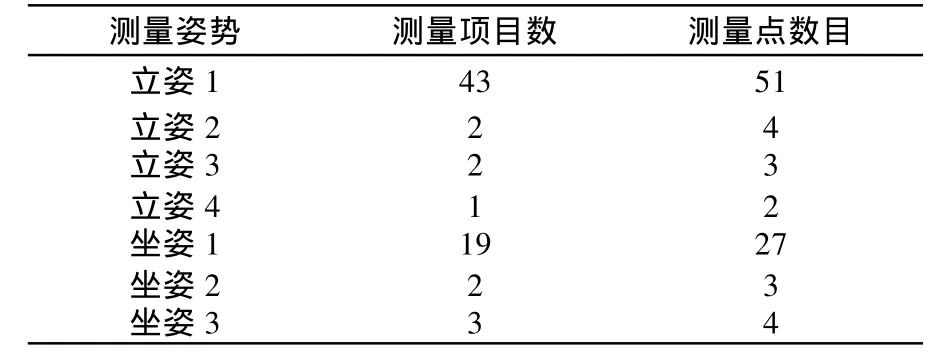
表1 测量项目和相关测量点分布表Tab.1 Table of measurement items and related points
2 测量原理
本系统采用被动式双目立体视觉原理进行测量.系统硬件主要由两个数码相机和一个标定架组成,图2为系统测量原理示意图,C1,C2为两个数码相机,分别用来拍摄人体的侧视图和正视图,A,B和C为标定架上的三块互相垂直的平面板,XwYwZw为固定了标定架上的三维世界坐标系,每块板上分别布置了10个在XwYwZw坐标系下位置已知的定标点.

图2 系统测量原理示意图Fig.2 Sketch of measurement principle
测量流程图如图3所示.首先,由两个已标定好的数码相机在同一时刻从正面和侧面两个角度获取被测人体的两幅数字图像;然后,运用图像分割、特征提取等方法在两幅图像上提取与人体上测量点对应的特征点对,并运用基于配极约束的交互式编辑工具对特征点进行确认;第三,基于双目视觉原理,利用标定结果计算出每对特征点对应的人体的测量点;最后,根据测量点坐标,计算人体各项测量项目尺寸.

图3 系统测量流程图Fig.3 Flow chart of system measurement
本文定义三维测量点在正视图或侧视图上的投影点为特征点,一个三维测量点在正视图和侧视图的两个特征点称为此测量点的特征点对.测量点的特征点对的识别是本系统的关键问题.设测量点M在两幅图像上的特征点对为(m1,m2),根据(m1,m2)的识别难度可将测量点分为如下3类:
1)第1类测量点:(m1,m2)两点都能准确识别.系统能全自动提取M.
2)第2类测量点:(m1,m2)中有一点能准确识别.不妨设m1能准确识别,采用双目视觉测量中的配极几何原理,求出m1在另外一幅图像上的配极线u2,然后运用人体比例关系,给出m2在u2上的初始位置,并允许用户在配极线u2上交互式编辑m2.
3)第3类测量点:(m1,m2)中两点都不能准确识别.运用人体比例关系给出(m1,m2)的初始位置,之后用户可以交互式编辑(m1,m2)点.编辑m1或m2时,系统会在另一幅图像中显示相应的配极线u2或u1,以协助用户定位m1或m2.参见图5.

图4 双目视觉配极几何Fig.4 Epipolar geometry of binocular vision
3 关键技术
3.1 相机标定
摄像机标定是指建立摄像机图像像素位置与场景点位置之间的关系,根据摄像机模型,由已知定标点的图像坐标和世界坐标求解摄像机的模型参数.本系统采用空间标定架进行标定,标定架由两两互相垂直的三块平板构成,尺寸为2 m×1 m×2.5 m,标定架上建立如图2所示的世界坐标系XwYwZw.每个面上贴10个圆心位置已知的定标点,采用Tsai方法来标定相机.标定过程如下:在每次测量前,每个相机拍摄一张三维标定架的标定图像,利用标定架上的三维定标点和其在标定图像的像素点对应关系,运用T sai方法标定摄像机的内外参数.
3.2 图像分割
通过图像分割将被测人体从整体分为头部、胸部、躯干、左臂、右臂、左腿、右腿等7个部分,其目的如下:1)将特征点的识别问题分解到人体的某个部分,使得特征点的识别更加快速和鲁棒;2)对于难以识别的特征点,分割可以更加准确地寻找此点在人体上的比例,可以得到更为准确的初始点.
分割过程如下:1)测量图像进行二值化.随后采用边界跟踪算法[8]得到有序的人体轮廓像素点集T;2)寻找分割关键点.由于多数分割关键点位于人体各个部分在轮廓线上的连接处,在轮廓线上曲率较大,采用文献[8]中所描述的DOS方法,通过寻找到曲率极值点来进行分割关键点识别.不能用上述方法寻找的分割关键点,则通过人体姿势、比例关系和颜色变化等方法寻找;3)并根据不同的姿势将分割关键点沿轮廓线逆时针方向排序,找到每个部分的分割点完成分割.图5给出了立姿1测量图像的分割结果,人体上的点为识别的分割关键点,L,A,B 3点分割出头部,B,C,D 3点分割出左手,D,E,G,I,H 5点分割出躯干.
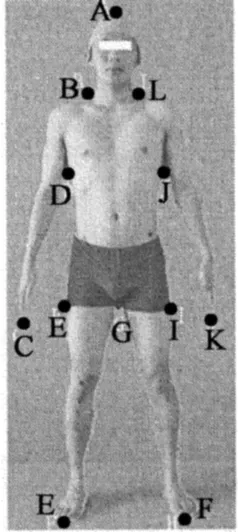
图5 立姿1图像分割结果Fig.5 Segmentation result of standing posture
3.3 双目视觉
1)三维重构.根据摄像机标定结果,给出一个特征点对,即可计算出相应两条射线的交点作为对应的三维测量点.理论上两条射线应该交于一点,由于系统误差和测量误差等原因,两条射线经常为异面直线,本文采用异面直线公垂线段的中点作为实际测量点.
2)配极约束.本方法利用配极约束来辅助寻找第2类与第3类测量点对应的特征点.配极约束原理如图4所示:设双目立体视觉测量中左右图像分别为I1和I2,设(m1,m2)为两幅图像上的一对对应点,m2一定位于m1在图像I2上所对应的配极线u2上,反之亦然.这个特性在双目立体视觉中称为配极约束.当已知一对对应点中的一个点时,根据配极约束可以将另一点的搜索范围从整个图像平面缩小到配极线上,将二维搜索变为一维搜索,从维度上降低了特征点识别的复杂度.
3.4 测量项目计算
特征点识别出来以后测量项的计算就有了数据依据.测量项分为高度、宽度、厚度、两点间线段距离、弧长、围长等.其中高度、宽度、厚度、两点间线段距离可以由测量项的相关测量点直接计算出来.弧长由3个测量点进行定义,采用此3点来拟合过点三阶(2次)B样条曲线,求B样条曲线的长度作为测点定义的弧长;围度由4个测点进行定义,4个测点分别为椭圆圆长轴和短轴半径分别为a和b,则围长g=π(a+b).如果4个测点不共面,需要先求出4个测点的最小二乘平面ω,并将4个测点投影到ω上,运用投影点来拟合椭圆计算围长.
4 系统设计与实现
4.1 功能概述
针对每个被测者,本系统采集2幅定标图像和7个姿势14幅测量图像,通过图像分割和特征提取等方法自动识别人体所有测量点对应的特征点对并通过交互式检查和更新,运用双目视觉原理重构出所有94个测量点的三维坐标,并计算出72个测量项目的尺寸.系统的主要功能有:
1)被测者管理:系统使用数据库来对被测者的个人信息、图像数据、测量点和测量项目等进行管理,并提供必要的查询、增加、删除、报表生成、结果打印等相关功能.
2)读入并显示图像数据:将被测者的测量图像数据读入,并对读入的图像显示和浏览.
3)特征点识别:通过图像分割、特征提取、配极约束等方法,利用人体比例关系,在没有人工干预的情况下完成特征点识别.
4)自动测量:完成特征点自动识别后,系统能够根据标定结果自动重构所有测量点的三维坐标,同时自动计算所有测量项目的尺寸.
5)交互测量:用户可以通过交互选取两个或多个测量点,指定待测量的测量项目类型(宽度、厚度、两点间距离、弧长、围长等)来进行交互测量.
6)特征编辑与更新:系统自动识别特征点后,用户可以通过交互编辑的方式修改特征点位置,同时自动更新相应的测量点和测量项目.
7)测量结果输出:系统能够将测量的结果保存为XML文件或Excel表格文件.
8)批处理:用户指定一个数据文件目录以后,系统可以自动的完成目录下全部数据的全自动测量工作.
4.2 系统设计与实现
系统主要由相机标定、图像采集、渲染引擎、特征点识别、测量点编辑、I/O操作、配置管理、数据库管理、批量处理等模块组成.
系统运行于Windows XP,在VC.NET 2003开发平台上采用C++语言实现,界面开发包为Xtreme11.2,底层图形库为OpenGL API.
图6为系统运行的主界面.主界面为测量界面,可以分为Menubar,Toolbar,Statusbar,View和Workspace 5个部分:Menubar为系统菜单;Toolbar为工具栏;View区域用来显示待测量图像和测量项目在测量图像的示意图;WorkSpace用来显示测量点列表、测量项目列表和示意图,示意图包括特征点的参考位置与测量项目的图示.另外系统还包括图像采集界面、数据库操作界面、交互测量界面、批处理界面等多个操作界面.

图6 系统主界面图Fig.6 Main interface of system
4.3 测量结果分析
定标精度:根据30个定标点,通过Tsai算法对相机进行标定,标定精度如下:平均值为1.626 475 mm,标准差为0.866 529 mm,最大误差为3.337 957 mm,平方差之和67.174 980 mm2,标准标定误差为1.343(达到了较高的标定精度,越接近于1标定精度越高).从该结果可以看到,定标的平均误差在1.62 mm左右,满足人体测量需求(人体测量要求误差在5 mm之内).
测量精度:测量精度采用标定物体来进行检验.用相机采集标定物体的两幅图像,使用软件提供的交互功能进行两点之间的距离测量,此距离与标准距离之差为测量精度.多次测量标准距离为55.8 cm的两点间距离,平均误差小于2 mm,满足人体测量要求.
系统对20名待测者进行测试,被测者年龄、性别、体型分布较为均匀.经实验验证,其中86.7%的测量项目其自动测量结果与手工测量结果相差在5%之内,其余的测量项目由于测量点无明显特征,或测量项目为围度或弧度等原因存在误差大于5%,经手工调整后也能满足测量要求.
5 结 论
本文给出一种基于图像的人体参数自动测量方法,并设计与实现人体参数测量系统.该系统针对每个被测者,采集2幅定标图像和7个姿势共14幅测量图像,通过图像分割和特征提取等方法自动识别人体所有测量点对应的特征点对并通过交互式检查和更新,运用双目视觉原理重构出所有94个测量点的三维坐标,并计算出所有72个测量项目的尺寸.系统具有测量设备简单、便携,测量速度快、测量效率高,操作方便等特点.
由于对每个姿势只有两幅图像,不能完全重构人体的三维信息,导致
1)某些测量点无法全自动精确重构;
2)由于弧长和围度测量曲线上的测量点太少,弧长和围度尺寸只能估算.改进办法有:第一,增加相机,采用多目视觉测量;第二,采用统计学习的方法,增加特征点的识别精度.
[1] RIOUX M,ABDALI O,VIKTOR H,et al.Exploring anthropometric data throug h cluster analy sis[EB/OL].[2010-06-05].http://papers sae org/2004-01-2187.
[2] CYN THIA L I,HWANG S J.3D body scanning systems with application to the apparel industry[J].Journal of Fashion M arketing and Management,2001,5(2):120-132.
[3] ROBINET TE K M,DANEN H,PAQUET E.The caesar project:A 3-D surface anthropometry survey[C]//IEEE 3-D Digital Imaging and Modeling,Ottawa,Canada:IEEE Computer Society,1999(10):380-386.
[4] HQL Site.Research institute of human engineering for quality life[EB/OL].[2010-06-05].http://www.hql.or.jp.
[5] VisImage Systems Inc.Body Measurement and Garment Sizing with BoSS-21[EB/OL].[2010-06-05].http://www.vis.ca/product.htm.
[6] Human Solutions GmbH.Precise body measurement[EB/OL].[2010-06-05].http://www.human-solutions.com.
[7] TSAI R Y.An efficient and accurate camera calibration technique for 3D machine vision[C]//Proc of IEEE Conference of Computer Vision and Pattern Recognition,Miami Beach:FL,1986(41):364-374.
[8] 鞠里.基于彩色图像的手部测量系统的研究与实现[D].北京:北京航空航天大学计算机学院,2004:30-39.JU Li.The research and implementation of hand measurement system based on color images[D].Beijing:School of Computer Science and Engineering,Beijing University,2004:30-39.(In Chinese)
