基于人工智能技术的深松机械智能化控制研究
2024-02-03张亚超李素敏
张亚超,徐 洋,李素敏
(许昌电气职业学院,河南 许昌 461000)
0 引言
我国作为农业大国,国土面积位居世界第三,但我国也是一个人均耕地位于较低水平的国家之一。随着现代化城市的建设,耕地面积不断被城市用地占用,为保证土壤质量,国家出台一系列耕地保护政策,提高耕地质量。深松机作为保护性耕作的主要整地机械之一,如图1所示,在农业生产领域使用广泛。深松机特殊的深松铲能够在保证原有土壤结构较为完整的基础上,作业过程能够有效破坏坚实的犁底层,使土壤变得松散,增加土壤储水保墒能力[1]。
图1 深松机
深松机保证作业耕深是衡量深松作业好坏的重要指标。但是由于一些地区土质或地表前茬作物残留的缘故,导致传统的深松机深浅不一,作业深度过浅,达不到犁底层深度影响作物生长,不符合农艺要求;作业深度过深,牵引动力增加,油耗提高导致成本上升[2-5]。现阶段,测量作业深度分为自动测量和人工测量两种。自动测量可分为直接和间接,目前多数采用超声波原理测量作业机具与原地面标定平面高度差计算深度的控制系统属于直接测量;采用倾角传感器借助数学几何关系,计算地面与当前作业机具的位置状态的角度关系,进而计算作业深度的方法属于间接测量。
随着电子信息技术的发展,国内学者逐渐开展了对作业深度自动化测量的研究。丁瑞华[6]利用测量作业机具上设计的测力臂与地面的角度建立数学模型计算作业深度。但此类方法对于地面平整度精度不高的地块误差较大。蒋哮虎等[7]为测量地面平整度不高地块的作业耕深,利用超声波和红外传感器结合的方式,测量准确度得到一定程度上的保证。杜新武及其团队[8]为解决旋耕机作业过程中的旋刀组形变和车轮位置变化引起结果的影响,利用倾角传感器并且建立机具下拉杆与机具平台平面之间的角度数学模型关系间接计算作业深度。
本文在前人研究成果基础上,在深松机上安装倾角传感器以及辅助监测系统,对深松过程中的倾角变化量进行动态监测,根据深松机倾角变化量计算深松机入土深度,利用智能控制技术调节深松机的入土深度,达到精准深松作业控制的目的,从而提高深松作业质量,降低深松机的动力消耗。
1 系统组成设计
本文所述深松机作业系统主要包括拖拉机、车载控制器、升降装置、深松铲、智能化控制系统。根据深松机械智能化控制系统的功能需求,将传感器技术、物联网技术和无线传输技术相结合,确定智能深松机械控制系统的设计与各部分主要作用。监控系统主要包括传感器、车载终端、服务器、监控终端四个部分。深松机械智能化控制系统的主要组成如图2所示。
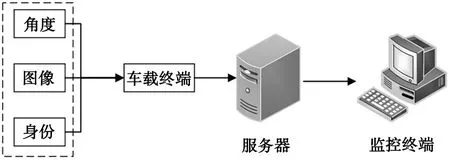
图2 系统整体结构
深松机械智能化控制系统主要由农具识别、作业角度采集、农具图像监测、农具作业控制、历史数据查询、报警6个功能模块组成,系统组成框图如图3所示。

图3 系统功能组成框图
本文在拖拉机以及深松铲各安装了一倾角传感器,两倾角传感器之间的数据差值即为深松铲的入土角度,通过运算处理可得到深松铲的实际入土深度,如深松铲实际入土深度偏离理想深松土壤深度范围,车载终端将驱动升降装置完成深松机作业系统入土深度精确控制,并产生报警信号发送至监控终端;车载终端还可将监测到的深松铲作业深度信息存储到服务器内,供操作人员查询历史数据。
农业机械识别系统主要实现了对各种农机具的识别,并对各种农机具的工作角度信息进行了存储。不同农机具在收到车载终端命令后,会根据自己的ID数据类型向服务器发送数据。作业角度采集功能是对犁具下放以及提升的角度信息进行采集并储存到数据库中。
农具图像监测功能能够实现利用车载终端接收服务器查看作业现场图像命令后,将当前农机具的图像等信息参数实时发送给服务器,或无需指令,车载终端保持一定时间间隔采集当前农机具作业情况图像参数发送至服务器。农具作业控制功能是通过农具安装的传感器进行作业数据采集,深松机械控制系统进行数据处理分析,并生成控制指令,由车载终端控制执行机构进行深松作业状态调整,或按照控制指令进行系统报警与状态显示。
2 深松机倾角监测原理
当拖拉机角度传感器读数为0时,深松机角度传感器读数实际反映深松铲入土角度。当机组在坡面上作业行进时,安装于拖拉机上的角度传感器读数为坡面角度,深松机上角度传感器读数与拖拉机上角度传感器读数的差值为深松铲入土角度。
综合考虑地面角度波动和深松目标深度,对深松机倾角进行修正,得出深松机倾角目标角度控制模型[9],即式(1)。

(1)
式中θ—深松机上角度传感器读数,(°);
θ1——深松机倾角目标角度,(°);
β—拖拉机上的角度传感器读数,(°);
Δβ—作业过程拖拉机角度变化量,(°);
h0—深松机与拖拉机连接点到深松铲尖点的垂直高度,mm;
a—深松机与拖拉机连接点到深松铲尖点的水平距离,mm。
3 深松机智能控制系统设计
深松机精准控制时,通过前端传感器进行数据采集,车载终端进行数据处理分析,并生成控制指令,由后端执行机构进行深松作业状态调整,或按照控制指令进行系统报警与状态显示。深松机控制系统采用高性能STM32F103ZET6作为车载终端核心处理芯片,选用倾角传感器要求采集精度不低于±0.3°,且能够同时进行多通道数据处理,传感器与车载终端之间通过标准通讯方式进行数据交互。执行机构电气控制系统接收车载终端生成的控制指令,驱动执行机构进行深松作业。本文深松机构电气控制系统采用STM32单片机进行系统设计,以车载终端内部单片机所发送的控制指令作为输入信号,以深松机构的作业状态作为输出。图4为深松机智能控制系统的主要控制流程图。
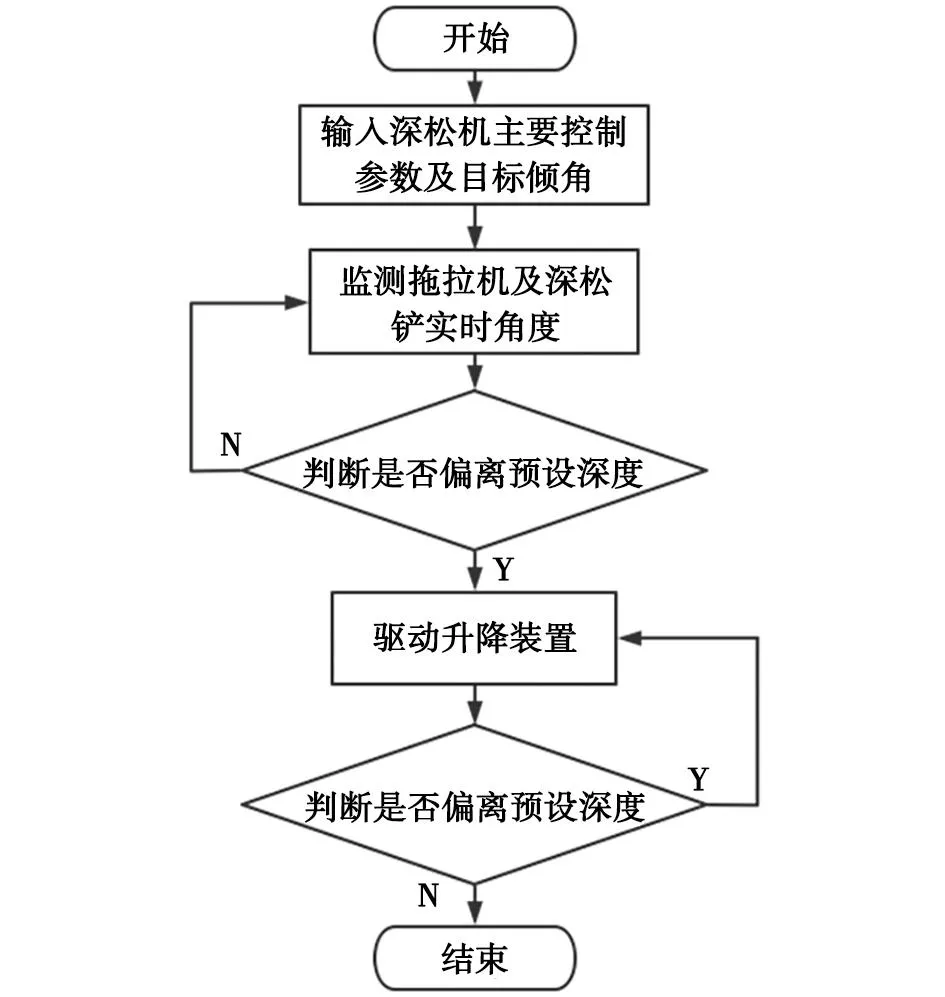
图4 系统控制流程图
4 结论
随着我国城镇化建设的发展和农业劳动力的转移,农业机械的应用数量会越来越多,国家对农业机械的补贴投入越来越大,因而,应通过现代化的技术手段加强对农业机械作业质量的管理。深松机械智能化控制系统,有效改变了无法真实掌握农田深松机械的实际情况的状况,加强了对作业机手的管理,提高了土地深松质量,避免了与机手因面积和质量产生纠纷,有效地使国家补贴政策真正的保质保量的惠及到每个参与深松作业的农机手,效果良好。通过本技术的应用,使我们初步看到了科技创新与农业机械相结合的广泛应用前景,对农业机械智能化控制研究了提供参考。
