基于模糊PID算法的食用菌大棚温度控制系统研究
2024-02-03李再新陈继飞
李再新,陈继飞
(1.西南林业大学 机械与交通学院,昆明 650224;2.玉溪农业职业技术学院,云南 玉溪 653106)
0 引言
我国是最早栽培食用菌的国家之一,食用菌总产量占全球七成以上,目前,我国已是全球最大的食用菌生产国、消费国和出口国[1]。由于食用菌对生长环境的要求非常严格,不同生长阶段对生长环境的要求也不尽相同,因此,对食用菌的人工种植带来了很大的挑战。在栽培食用菌的过程中,温度是影响食用菌生长的重要因素之一,若能实现对食用菌大棚的温度控制,可大大提升食用菌的品质和产量。常用的食用菌大棚温度控制有简单的开关量控制、PID控制、模糊控制、模糊自适应PID控制等。其中开关量控制最为简单,其原理是通过实时采集的温度来控制调温设备的开关状态,从而实现对温度的调节,但该方法存在控制效果不稳定、精度低等缺陷;PID控制相比于开关量控制,在精度、滞后性、非线性上都有了很大的提升,但常规的PID控制中超调量较大,会导致局部温度过高,从而影响食用菌的生长。因此,针对食用菌的生长特性研发超调量低、响应速度快的温度控制系统具有重要意义。
1 系统设计
食用菌的生长受温度、湿度、二氧化碳浓度、光照强度等多种因素的影响,但温度作为影响食用菌生长的重要因素之一,对食用菌的生长、产量及质量有着至关重要的作用。因此,本研究只针对温度控制这一参数进行探究,在研究过程中,为了使该系统有更好的拓展性,采用有51个I/O口的STM32F103CRT6增强型单片机芯片为核心,通过空气温湿度传感器DHT11对食用菌大棚内温湿度信号进行实时采集,信号线将采集的数据传送至STM32F103CRT6单片机,从而将采集的温湿度信号送至显示器进行显示。同时,中央处理器会将此时的温度值与预设值进行对比,在模糊PID的运算和处理后,输出控制信号至光耦固态继电器模块,利用光耦固态继电器驱动电热风机进行温度调节(图1)。
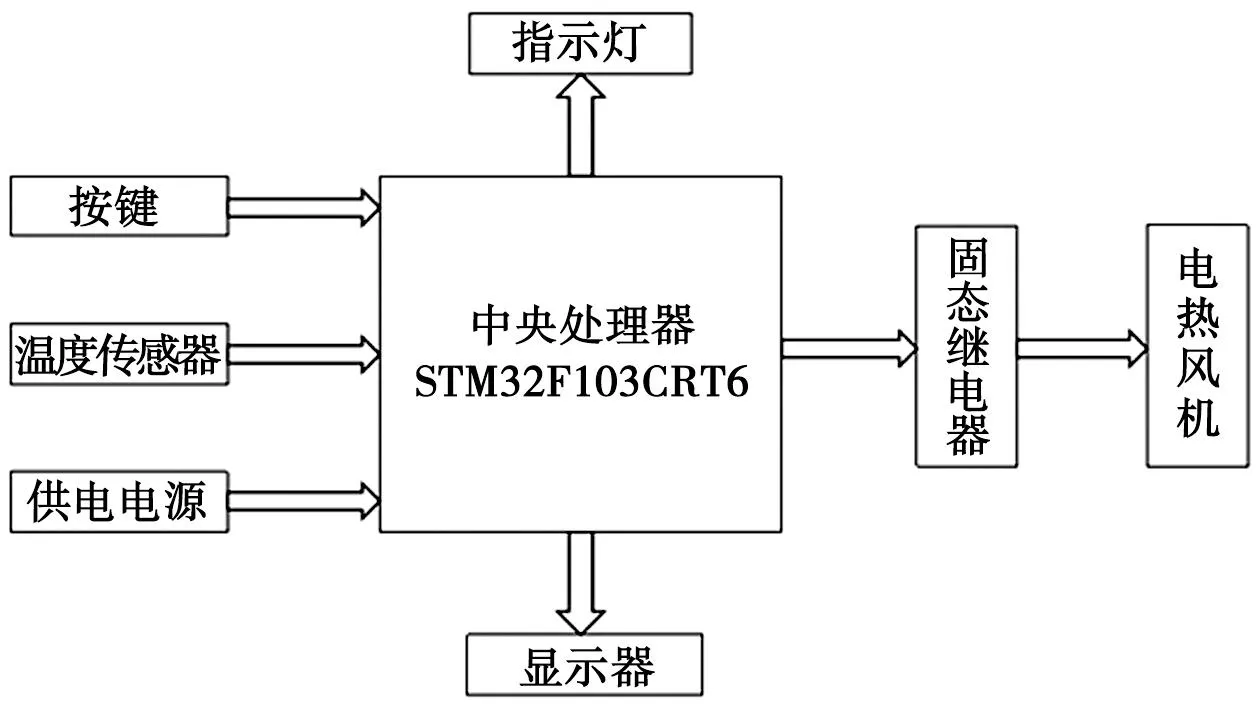
图1 食用菌大棚温度控制系统框图
2 系统硬件设计
食用菌大棚温度控制系统主要由供电模块、中央处理器模块、固态继电器输出模块、空气温湿度传感器模块、按键模块、显示模块、电热风机模块等组成。下面将对上述重点模块进行详细说明。
2.1 供电模块
本系统的供电电源采用220 V交流输入,通过开关电源将220 V交流电变成9 V直流电源后,经过7805稳压芯片组成的稳压电路,将电压转换为5 V,稳压后的5 V直流电源通过AMS1117稳压器将其转换为3.3 V直流电源,再为单片机供电。具体电源电路详见图2。
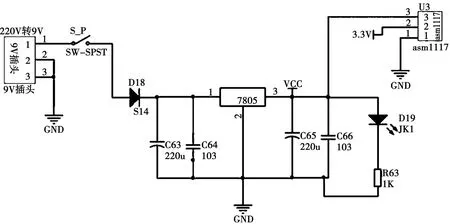
图2 供电模块原理图
2.2 中央处理器模块
本系统以STM32F103CRT6为核心,芯片为ARM32位Cortex-M3 CPU,最高工作频率72 MHz,1.25 DMIPS/MHz,芯片上集成512 KB的Flash存储器,6~64 kB的SRAM存储器。2.0~3.6 V的电源供电和I/O接口的驱动电压等,具有功耗低、可靠性高、抗干扰能力强和可扩展性高等优点[2-3]。因此,该芯片满足本次系统设计的所有需求。
2.3 温度采集模块
DHT11是一款数字信号输出的复合型传感器,可以测量空气温度和湿度,该传感器还具有极高的可靠性和稳定性,因此非常适合应用在该系统中。DHT11有四个引脚,其中1号引脚接5 V的电源,4号引脚接电源负极GND,2号引脚接上拉电阻后连接单片机I/0口。具体连接详见图3。
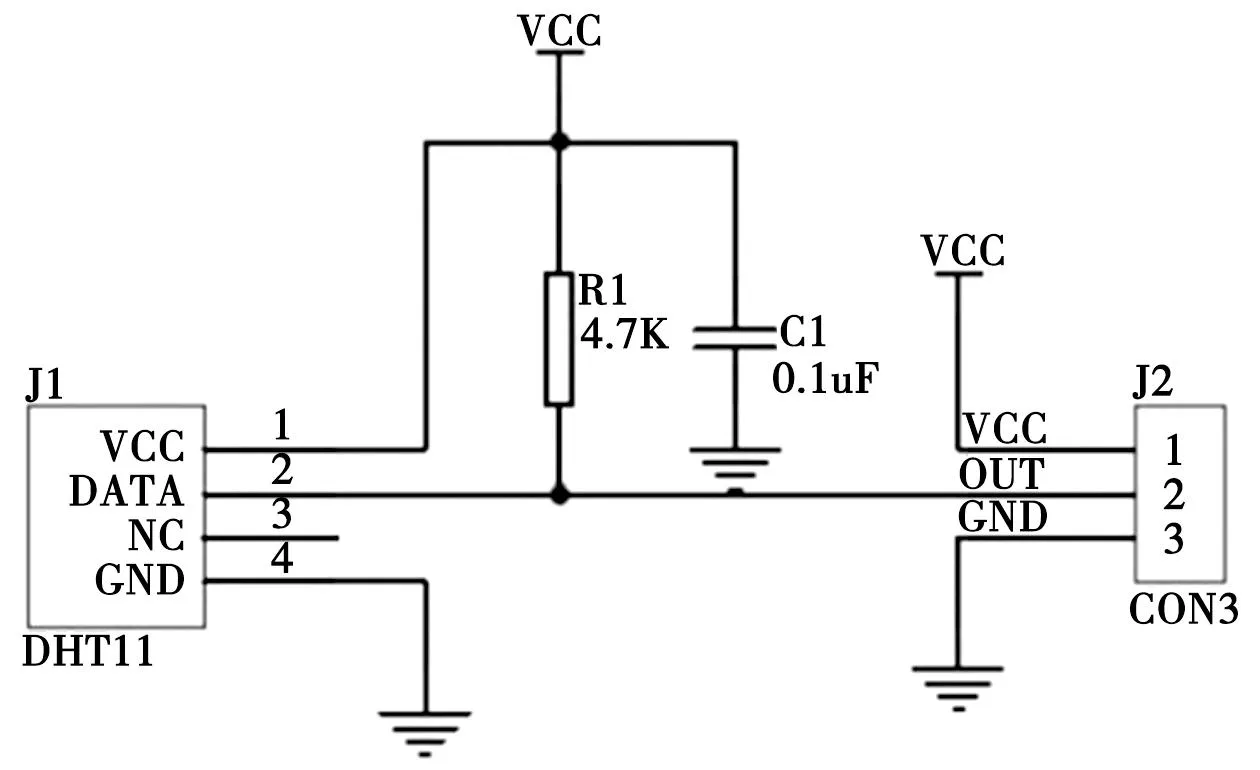
图3 温度采集模块原理图
2.4 固态继电器输出模块
输出电路利用单片机输出I/0口直接与光耦芯片EL871连接,通过光耦隔离单片机与输出电路,从而起到保护单片机的作用[4]。光耦的输出端连接NPN型三极管的基极,利用控制集电极与发射极之间的导通状态,控制固态继电器的吸合达到对热风机工作状态的控制,从而对温度进行调节。固态继电器模块原理图见图4。
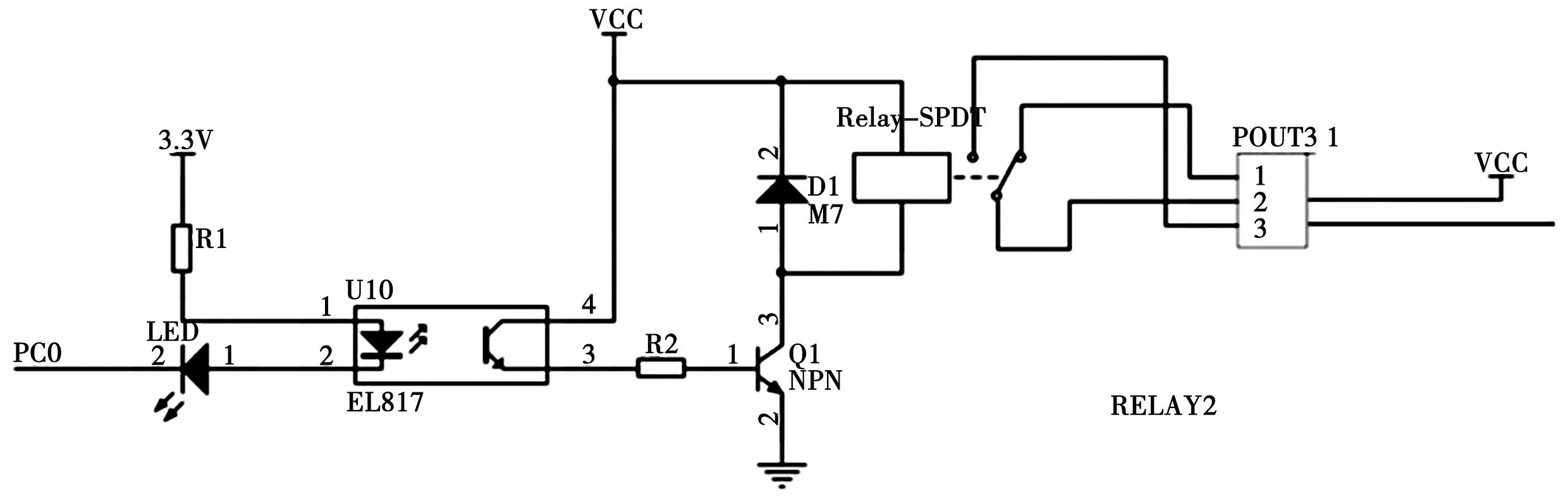
图4 固态继电器模块原理图
3 控制算法及仿真
根据相关文献[5-6],食用菌的菌柄一般处于20~30 ℃生长最快,温度在26 ℃为生长速度最大值;食用菌子实重量在24 ℃时最大,超过26 ℃子实重量下降速度非常快。综上所述,常规PID控制超调量较大,很难满足食用菌的温度控制要求,本次研究提出一种模糊自适应PID控制方法,即通过处理器计算出温度传感器采集到的温度值与设定温度值的偏差e和偏差变化率ec,对e和ec进行模糊化处理和模糊推理,然后经清晰化处理得到PID控制器的三个修正量即ΔKp、ΔKi、ΔKd,最后再通过PID控制进行温度调节,本控制策略可以有效解决PID超调量过大的问题,还能提升控制系统的响应速度[7]。模糊自适应PID控制系统结构图,如图5所示。
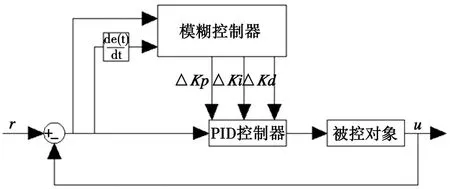
图5 模糊自适应PID控制系统结构图
3.1 模糊PID控制
图5中模糊控制器的输入变量为模糊子集E、EC,输出变量为ΔKp、ΔKi、ΔKd[8]。它们的语言变量模糊子集都是取为{NB,NM,NS,ZE,PS,PM,PB},7个量化等级,模糊论域均取为{-1,-0.8,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.8,1},详见图6。
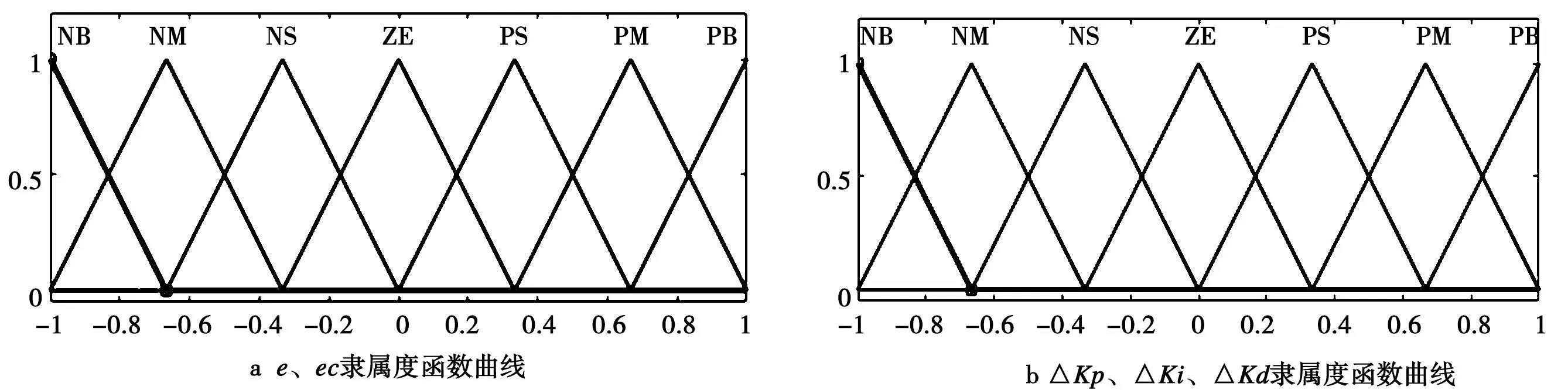
图6 输入输出隶属函数曲线
模糊推理是模糊控制的重要组成部分,是根据作物生长规律和人类实际操作经验总结出来的一种语言控制规则[9-10]。本系统具体模糊控制规则如表1所示。
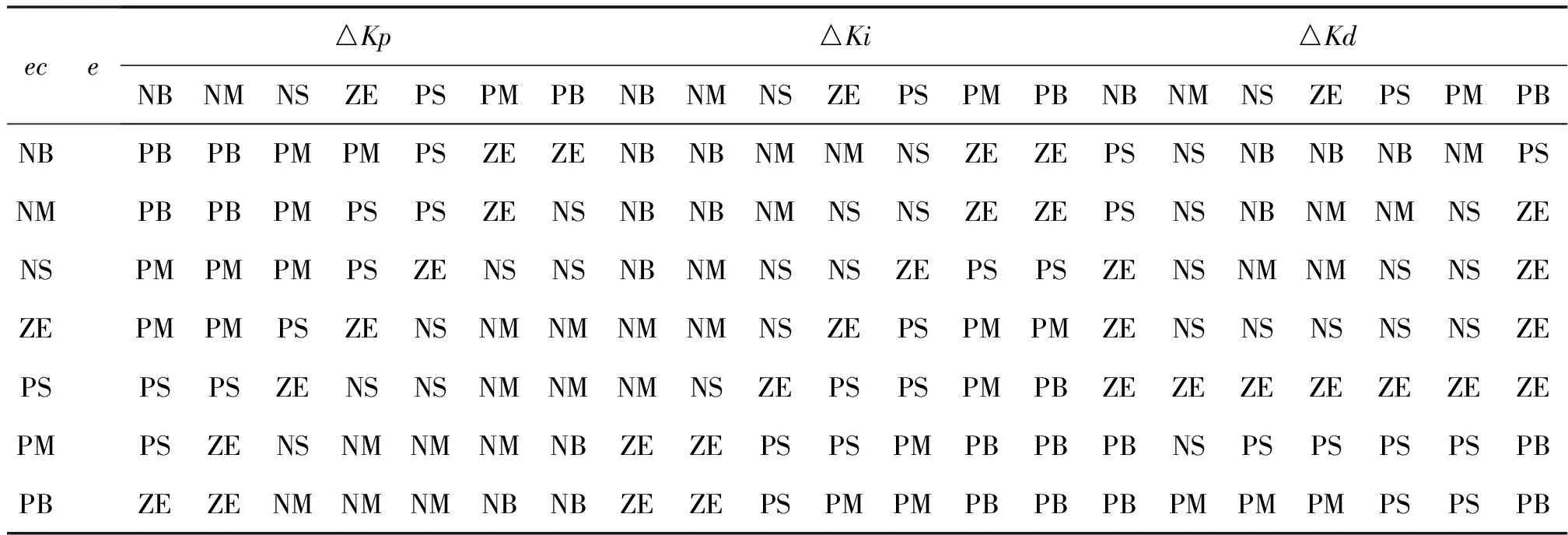
表1 模糊控制规则表[10]
将表一中的模糊规则编辑到模糊控制器中,在控制规则库的观测窗口中可以观测出ΔKp、ΔKi、ΔKd与输入变量e和ec的关系(图7)。
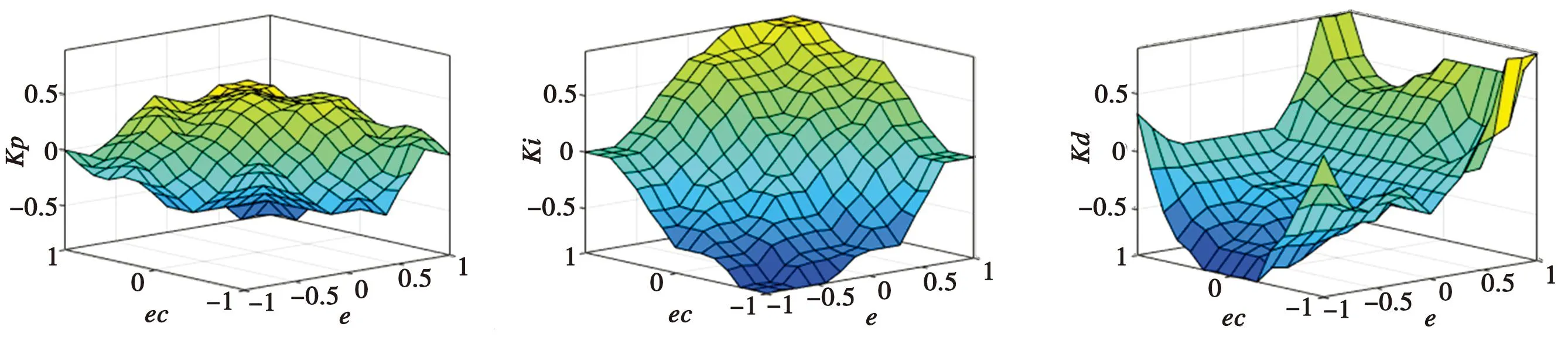
图7 ΔKp、ΔKi、ΔKd规则库观测窗
3.2 仿真试验
使用MATLAB/simulink软件搭建常规PID控制系统和模糊自适应PID控制系统进行仿真,采用式(1)的数学模型作为两个系统的传递函数[2]。
(1)
设定PID控制系统参数初始值Kp′=4.1、Ki′=0.03、Kd′=20[3]。系统仿真模型框图,如图8、图9所示。
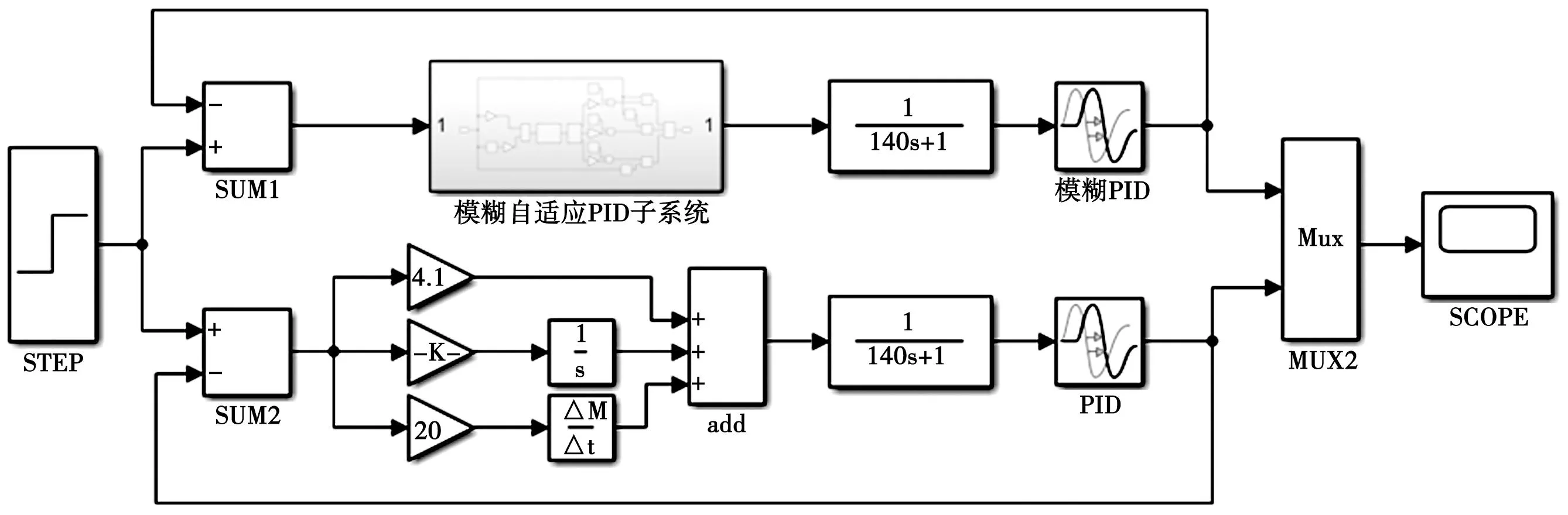
图8 系统仿真模型框图
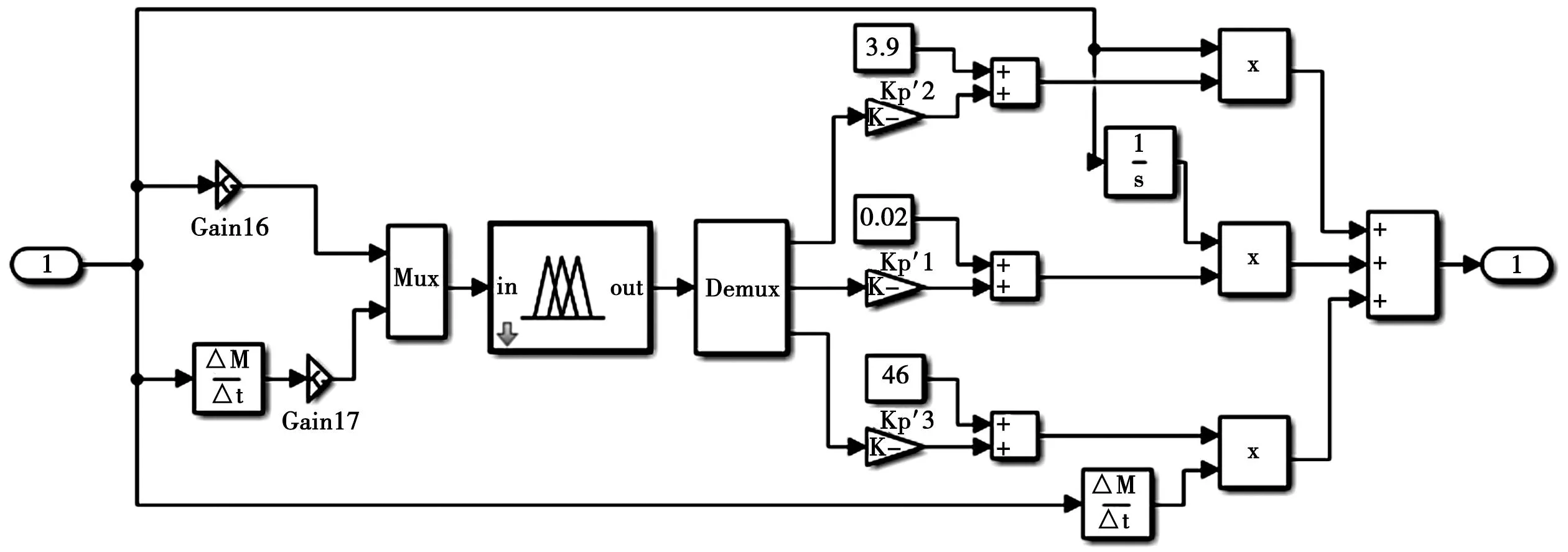
图9 模糊自适应PID子系统模块内部结构图
其中图9为图8中模糊自适应PID子系统模块内部结构图,它以偏差e和偏差变化率ec作为输入量,经模糊推导得到PID参数的修正量△Kp、△Ki、△Kd,再将修正量送入PID控制器中进行PID控制,以此完成整个模糊PID自适应控制。
食用菌生长对温度要求比较高,通常情况下在24~26 ℃最为适宜,结合这一特性,本次控制系统设置目标温度值为25 ℃,系统仿真时间设置为600 s,常规模糊PID控制和模糊自适应PID控制的温度响应曲线如图10所示。
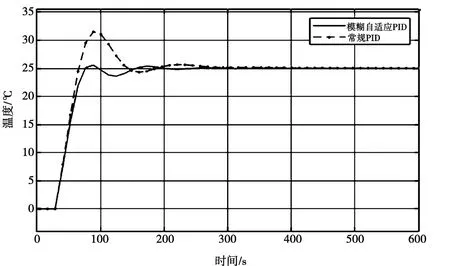
图10 常规模糊PID与模糊自适应PID控制的温度响应曲线对比图
根据图10中两种控制方案的温度响应曲线可以计算出系统超调量、调节时间和峰值时间等参数,结果如表2所示。
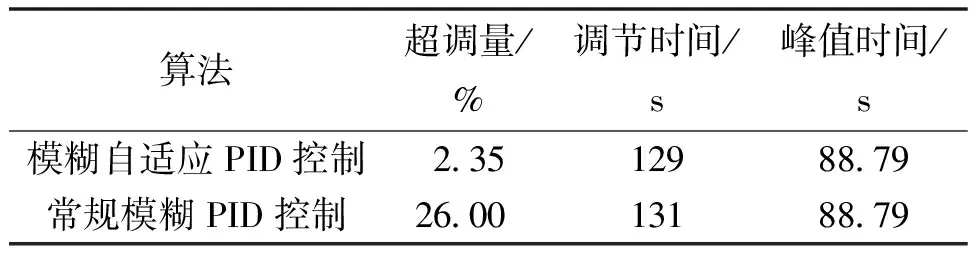
表2 两种方案的仿真参数对比
从表2中可以看到模糊自适应PID控制的超调量为2.35%,常规模糊PID控制的超调量高达26%;模糊自适应PID控制的调节时间为129 s,常规模糊PID控制的调节时间为131 s。模糊自适应PID控制方案各方面参数都优于常规模糊PID控制,其系统超调量低、响应时间快还比较稳定。
4 结论
本研究是基于STM32F103CRT6单片机设计的一款针对与食用菌大棚的温度控制系统,本系统采用了模糊自适应PID控制算法,把常规模糊PID控制算法跟模糊自适应PID控制算法进行建模仿真对比分析,验证了模糊自适应PID控制算法,调节时间短、超调量低的控制特性,满足食用菌大棚温度控制系统的各项要求,具有现实可行性。另外该系统具有较强的扩展性,空余的I/O接口可为后续的湿度控制、二氧化碳浓度控制和水肥一体控制等功能研究提供了较大的便利。
