水下测量技术在航道疏浚工程中的应用研究
2023-11-22饶鸿辉广东水电二局股份有限公司
◎ 饶鸿辉 广东水电二局股份有限公司
1.引言
测量工作是为获取地物的形状、大小及空间位置,和传统的地形测量一样,水下地形测量是为了获取水下地形的一种测量工作[1]。和传统地形测绘不同的是,水下地形测绘多一个水深的获取步骤,水下地形测量包括测点的平面位置和水深测量。平面位置主要采用GNSS定位技术确定,水深主要通过各种类型的单波束回声测深仪得到,由水面高程减去水深可得测点的水底高程[2-4]。水深测量是水下地形测量的基本方法,通过测量水底各点空间三维坐标,可让数据使用者对水下进行犹如陆上空间一样进行研究、设计、施工等工作,随着技术的发展,水深测量的技术手段有测深杆、水铊、单波束测深仪、多波束测深仪等[5]。在海道测量、水运工程测量、施工测量等涉及水深测量的领域,单波束测深仪和多波束测深仪变得尤为普遍,多波束相较单波束有着众多优势以及单波束无法企及的应用领域和方向,因此在水深测量领域,不管是技术层面还是行业发展趋势方面,多波束测深技术取代单波束测深技术已成大势所趋[6-8]。
2.水下地形测量概述
2.1 水下地形测量方法
水下地形测量是指对水体覆盖下地物、地貌的测量工作。主要包括测深、定位、绘制地形图等。水下地形测量方法主要包括:人工测量法、单波束测深法、多波束测深法。
①人工测量:对于边滩浅水区水下地形测量,测船难以航行时,应人工涉水施测,按照陆上地形碎部点测量方法施测;在水草或淤泥区可采用专业测深杆配合定位设备,人工定标并记录测深杆实测水深。
②单波束测深:通过换能器垂直向下发射短脉冲声波,声波遇到水底发生反射,反射声波被换能器接收,通过声波在换能器与水底之间双程旅行时间和水介质的平均声速来测量水深的方法。
③多波束测深:采用发射、接收指向正交的两组声学换能器阵,获得垂直航向、由大量波束测深点组成的测深剖面,从而实现高分辨率水下地形测量的一种方法。
高精度的定位测量须采用载波相位观测值,RTK定位技术是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站,RTK定位技术测量示意图见图1。流动站不仅通过数据链接收来自基准站的数据,还要采集GNSS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不到一秒钟,通信系统由无人船数据传输天线,网桥和遥控器组成。该定位测量较方便,数据处理简单,且适用性强。
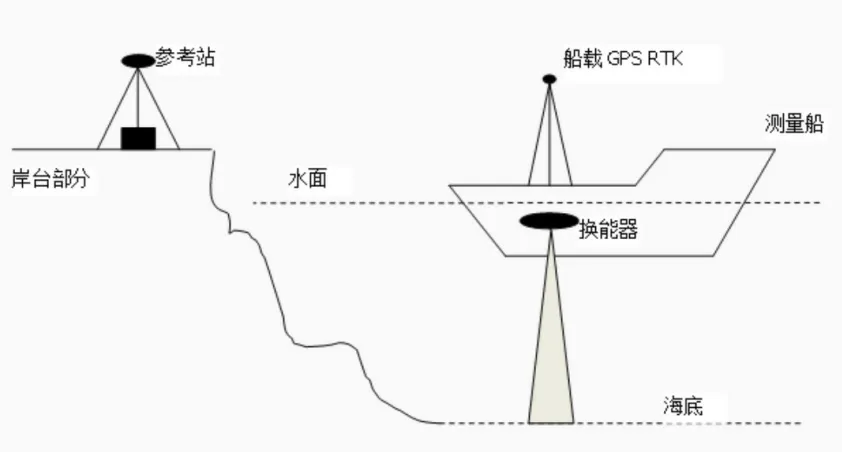
图1 RTK定位技术测量示意图
2.2 水下地形测绘作业方式
传统的水下地形测绘的作业方式有以下三种方式:①人工手持RTK下水测量;②皮划艇搭载测深仪;③有人船侧边悬挂式。三种方式适应不同的环境,也有着各式的优缺点。
1)人工手持RTK下水测量:此种方式适合浅水区域水下地形测量,成本低(无需测深仪,无需其它辅助设备),机动性强。但人员的安全得不到保障,精度方面受人为影响较大,深水区域无法采用此种方式,一般不采用此种测量方法。
2)皮划艇搭载测深仪:此种方式适合静水窄河测量。皮划艇相对来说,携带方便,下水前进行充气即可。适合中小静水河流水下地形测量,成本相对较低。因皮划艇较小,侧边比较圆润,测深仪难以稳定固定,且人员太多,相对船体太小,不是很安全。
3)新型水下地形测量方式—无人船:无人船用来进行水下地形测量已然被大众所接受,作为水下地形测绘方式的一种补充,在很大程度上替代了传统的作业方式。
传统水下地形测量作业方式有以下几个问题:①由于有人船的吃水问题,一些浅滩,滩涂无法到达,导致无法保证水域的全覆盖测量;②有人船测量时,很难保证船体稳定,易产生晃动移位,导致测量精度降低和位置偏移;③某些复杂环境,对船和人有危险,安全性得不到保证;④有人船或者人工涉水测量,容易造成测量区域漏测,少测。传统水下测量作业方式存在上述这些问题,无人船测量系统在这种背景下应运而生,与传统水下测量方法相比,无人船具有机动、灵活、安全性高的特点,可在环境复杂、工况恶劣的水域作业。
在水下地形测绘中,便携式多波束测量无人船采用无人测量船作为测绘平台,以无人驾驶遥控船为载体,集成控制系统、动力推进系统、无线通讯系统、定位导航系统、测深系统等多个系统,快速、精确地获取水下地形数据,工作更加便捷高效。便携式多波束测量无人船,主要为库容测量、建筑水下部分扫测和航道测绘等应用,提供一种两人即可实施的智能化自动化解决方案,无需租船、快速部署,采集数据成果可靠。每一艘无人船均具备独立的信息综合处理能力和决策能力,意味着这并不是一艘简单的“遥控船”,而是汇聚了自主航行、感知避障、协同控制、系统集成、平台设计等多项自主核心关键技术的多波束测量无人船。单船即可根据布设的测绘测线,自主航行至作业区域,依照任务指令工作,实现无人化、自主化测量,测量过程中不再需要人为干预。相比传统人工测绘方式,成本更低,作业效率、精度更高。传统的水下地形测量成果为二维的水下地形图,新型水下地形测量技术可生产三维的水下地形成果,相较于二维水下平面图,应用领域更加的广泛,主要应用于河道和航道测量、港口测量,也可应用于生态环境调查、疏浚通航、水下考古等领域。
3.实例应用分析
3.1 实例概况
本文研究实例为广东省韩江高陂水利枢纽工程航道疏浚工程。韩江高陂水利枢纽工程船闸主体已基本完工,为保证通航安全,在正式通航前应对该段河道航槽范围进行航道硬式扫床,主要技术参数如下:采用1980西安坐标系,珠江基面高程系。上游扫床河床底标高24.15米,下游扫床河床底标高20.15米,下游航道扩挖临时航道扫床河床底标高23.00米。
扫床范围:①上游航道疏浚(船纵0-293~船纵0-678):扫床长度385米,扫床宽度41.76~70.40米;②下游航道疏浚(船纵0+599~船纵0+658):扫床长度59米,扫床宽度41米;③下游航道扩挖临时航道:坐标角点(XHD1~XHD14):扫床长度963米,扫床宽度40米。
3.2 测量结果分析
扫床机具:机动船1艘、扫床杆3条(竖杆2条各7米,横杆1条6米)、GPS定位仪1套、测深仪1套。扫床工序:摆设GPS定位仪基站:基站设于T04-1控制点,检查点T04-2。经校核,平、高精度误差符合《水运工程测量规范》要求。测深仪:测深仪校核平面坐标后调入扫床计划线,扫床重叠宽度控制在0.5~1.0米,扫床计划线间距为6米。根据测深仪上的扫床计划线指挥扫床船航行,扫床过程对扫床重叠宽度超限的进行补扫。标尺入水深度根据实测水位变化调整,确保扫床数据准确。
基于此开展水下测量任务,获取实测水位:上游航道疏浚范围 26.95米~2 7.3 6 米;下游航道疏浚范围25.13米;下游航道扩挖临时航道范围24.95米~25.13米。标尺入水深度:上游航道疏浚2.8米~3.21米;下游航道疏浚4.98米;下游航道扩挖临时航道1.95米~2.13米。将水深取样界面导入电脑测量进行分析,获得水深取样界面图,如图2所示。根据标尺入水深度=实测水位-河床底标高,可得出河床底标高,据此导入地形软件,可获取航道测量图云,见图3,该成果表明本次扫床测量范围内,航道内未发现浅点,水下航道地形可满足安全通航条件。

图2 水深取样界面

图3 航道测量云图
4.结语及建议
本文通过对韩江高陂水利枢纽河道航槽范围进行航道硬式扫床的水下测量工作,采用便携式多波束测量无人船获取了航道测量成果,实现了水下高效大面积测量,节省人力投入,成倍提升工作效率。探索符合水利枢纽航道实际的,可复制、可推广的近岸海域水下地形测量经验,为推动航道开发和发展提供基础保障,也为全面铺开水下地形乃至内陆水下地形测量提供数据支撑及技术保障。所提交的水下地形图、三维地形建模成果等测绘数据,将为地区的综合开发、环境保护、海洋产业布局等提供基础测绘支撑。
