高速铁路接触网弹性吊索张力非接触测量方法
2023-09-25陈俊卿刘继冬关金发吴积钦陈维荣
陈俊卿,刘继冬,关金发,吴积钦,陈维荣
(西南交通大学 电气工程学院,四川 成都 611756)
弹性吊索作为组成高速铁路弹性链形悬挂接触网的核心要素,安装于接触网悬挂点处的承力索附近[1],起到减少接触网弹性不均匀系数、增加稳定性与改善弓网动态接触力的重要作用[2],具有密度高体量大的特点。运营经验与研究表明:偏离设计标准值的弹性吊索张力会影响弓网动态性能[3],严重时引起弹性吊索与支持结构的空间干涉,带来弹性吊索的磨损与断线隐患,影响列车安全运行[4-5],如图1 所示。行业相关规定,弹性吊索张力标准值为3.5 kN,施工误差应控制在5%以内[6]。因此保证弹性吊索张力的准确性是接触网施工质量控制与运营维护中重要的一环。进而,保证张力测量精度、提高测量便捷性具有重要的工程价值。为提高弹性吊索张力测量的安全性与便捷性,避免接触式测量所需的断电操作与上线作业,考虑利用结构形态参数反推受力状态的思路,基于形状反演方法提出一种弹性吊索的张力-几何形态解析模型,进而基于该模型实现弹性吊索张力的非接触测量。该方法能够利用现有的测量技术,让工作人员在地面或利用自动装置对接触网几何参数进行测量,再通过算法计算出弹性吊索的准确张力。
1 现有测量方法
国内外弹性吊索张力测量普遍采用手持式测量仪,主要采用的方法有静态应变测试法、静力横张法和液压测试法等[7],其中静力横张法被广泛应用。其原理是:首先通过多个受力点夹持弹性吊索,再利用静态变形评估出绳索张力。该方法原理简单、检测重复性高,但夹持改变了绳索的平衡状态,因此产生测量误差。在施工过程中,带有吊索张力显示的紧线器同样能够实现参数的测量[8],该仪器具有施工与测量一体化的特点,但由于仪器串联在弹性吊索上,其测量值与最终的安装效果有偏差。为提高精度,传感器电阻应变式张力仪器被应用到接触网测量[9],其缺点是受电磁干扰严重。
虽然弹性吊索张力测量仪器往精确化、轻量化与便携化方向发展,但均无法摆脱接触式测量所带来的限制。如图2中左图所示,接触式测量过程需要进行接触网断电与上线操作两步繁琐的准备工作。断电使得测量工作仅能在铁路天窗时间段内开展,该工作需要各方专业人员的协调配合,且必须在测量区间内挂接地线。而上线工作则需要依靠架设的梯车或作业车将人员送至高空作业,同样需要多位人员配合,且具有安全隐患。

图2 张力测量方式对比示意图Fig.2 Comparison diagram of tension measurement
因此,为提高测量的灵活性、便捷性与稳定性,减少测量准备工作,降低人力物力成本并规避风险,行业急需一种非接触式的弹性吊索张力测量方法,如图2中右图所示,通过单人在地面上的操作即可获取弹性吊索张力信息,并实现带电监测。
纵观其他领域的非接触式索网张力测量方法,大多数利用激光技术或摄像技术进行采集。采用气流激励并结合光电传感技术、CCD 技术的纱线张力的非接触式测量方法被大量研究[10-12],采用摄影测量仪获取位移并结合算法求解张力的方法被应用到航天索网结构张力的测量当中[13-15]。实践证明,非接触式方法在提高测量效率的同时,也解决了接触式测量仪器的寿命短、摩擦力干扰大等问题。
在接触网测量领域,激光技术已经得到了成熟的应用[16-18],这为实现弹性吊索张力的非接触测量提供了良好硬件基础。基于激光技术的几何参数测量仪能够精确地采集接触网的空间位置信息[19-20],因此通过找到接触网弹性吊索的空间信息与张力的对应解析关系,得到张力计算模型,即可求解出弹性吊索张力。
2 弹性吊索张力计算模型
2.1 结构特征参数
接触网弹性吊索结构特征参数作为计算模型的输入参数,包括了多个测点的距离信息以及高度信息,如图3 所示,特征参数的获取需要5 个接触线测点以及4个弹性吊索测点。

图3 结构特征参数Fig.3 Characteristic parameters
将15个结构特征参数分为3类,分别为图3中的6 个距离参数、5 个接触线高度参数和4 个弹性吊索高度参数,分别用3 种线型表示,具体含义如下。
距离参数:特征点与定位点的顺线路方向距离。图3中,1和2为定位点与左、右侧第1吊弦的顺线路距离,记做LL1与LR1;3 与4 为定位点距离左、右侧弹性吊索线夹安装点的顺线路距离,记做LL2与LR2;5 与6 为定位点与左、右侧第2 吊弦的顺线路距离,记做LL3与LR3。
接触线高度参数:图3 中,7 和11 为左、右侧第2 吊弦处的接触线高度,记做hL2与hR2;8 和10为左、右侧第1 吊弦处的接触线高度,记做hL1与hR1;9为定位点接触线高度,记做h0。
弹性吊索高度参数:图3 中,12 与15 为左、右侧弹性吊索线夹位置高度,记做HL2与HR2;13与14 为左、右侧弹性吊索上吊弦线夹位置高度,记做HL1与HR1;
15 个结构参数均能利用既有检测手段,如手动激光测量仪、几何参数检测小车等设备容易获取,参数采集的精度直接影响到计算的准确性。
2.2 张力计算模型
以2.1节中所述15个结构特征参数作为输入条件,利用几何原理和力学原理,可求解出弹性吊索的准确张力,计算过程按顺序依次为高度参数修正、吊弦力计算与弹性吊索张力求解。
2.2.1 高度参数修正
人工获取的高度参数是相对于轨面的,而计算受力时,接触网受到垂直于水平面向下的重力影响,因此需要将高度参数换算到世界坐标系下。经分析,为保证计算的精度,当采集点位于图4中所述的3种不同位置时,需要对采集的高度参数进行修正。

图4 测量参数修正示意图Fig.4 Schematic diagram of parameter correction
为方便计算,测量的所有高度参数,即图4中参数7,参数7 与参数10~15,需要换算为高度与定位点的高度差,以定位点位置为原点,参数{hL1;hL2;hR1;hR2;HL1;HL2;HR1;HR2}中的第i个参数Hi,可将数值转化为高度差ΔHi,根据三角原理,ΔHi可表示为
式中:Δh为中间变量,Δh=(Hi-h0) ·cosα。
式(1)代表测量位置处于坡道或平道时,式中:L为测量点与定位点的距离,m;Hi为测量点i的高度参数,m;h0为定位点的高度参数,m;α为线路坡度,(°)。
式(2)~(3)代表测量位置在竖曲线上,式(2)代表变坡后坡度减小的情况,式(3)代表变坡后坡度增加的情况。式中:xi为测量位置i与竖曲线起点的距离,m;x0为定位点与竖曲线起点的距离,m;α为变坡前的线路坡度,(°);R为竖曲线半径,m。
由于对绳索受力的求解直接由绳索的空间位置决定,高度参数修正是算法中非常重要的一环,其修正的准确性直接影响计算的精度。
2.2.2 吊弦力计算
对于受拉力的非等高悬挂,如图5所示,建立直角坐标系,固定点A和B的坐标分别用(xA,yA)和(xB,yB)表示。
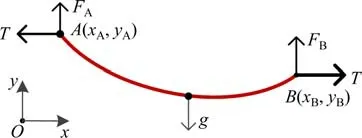
图5 非等高悬挂受力示意图Fig.5 Forces diagram of the unequal height rope
绳索的水平张力为T,重力常数为g,利用抛物线方程[21],当A点和B点高度差满足|yA-yB| ≤时,A和B两端的支撑力FA和FB的计算公式如下:
当A和B2点高度差,B点将不再提供支撑力,绳索重力完全由A 点支撑,即FA=g|xA-xB|,FB=0。
如图6 所示,将接触线的重量分为A,B,C和D 4 段,对于定位点两侧的第1 吊弦,左侧吊弦承受接触线A 的部分重力FA2与接触线B 的部分重力FB1,右侧吊弦承受接触线C 的部分重力FC2与接触线D的部分重力FD1。

图6 吊弦受力示意图Fig.6 Forces diagram of droppers
同时考虑吊弦的自重Gd,左、右侧吊弦对弹性吊索的拉拽力FL与FR为
否则FA2=0,与式(6)~(7)同理,可求得FC2与FD1,根据式(5)与FA2,FB1,FC2与FD1的求解结果,可求得准确的吊弦力。
2.2.3 弹性吊索张力求解
如图7所示,建立弹性吊索的受力模型,两弹性吊索线夹的位置为A与B。弹性吊索受重力、吊弦力以及承力索的拉力共同作用,承力索的拉力为弹性吊索张力的反作用力。
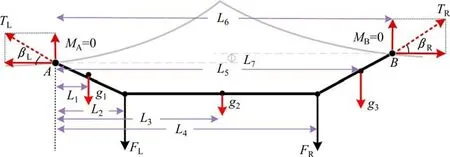
图7 弹性吊索受力图Fig.7 Forces diagram of the catenary stitch wire
弹性吊索的重力可分解为g1,g2与g33 段,其重心位置与弹性吊索线夹A 的水平距离分别是L1,L3与L5;吊弦拉拽力FL和FR与A点的水平距离为L2和L4;承力索拉力TL与TR可按照线索与水平面的夹角βL和βR分解为水平力与竖向力,两水平力的高差L7,两垂直力的间距为L6,即为A和B点的水平间距。
以A点为分析对象,由于A点处于静止未转动,则A点力矩为0,即
其中,右侧弹性吊索线索与水平面的夹角βL可根据三角函数求出,其正弦和余弦表示为
综合式(8)~(9),并将式(8)中L1至L7替换为测量参数,整理可得
其中,gc为弹性吊索的单位长度所受的重力,N/m。
至此,右侧承力索对弹性吊索的拉拽力TR已求出。同理,由于图7 中B点的力矩为0,可建立B点的力矩平衡方程,求解出左侧承力索对弹性吊索的TL,根据力的相互作用可知,承力索对弹性吊索的拉拽力即为弹性吊索的张力,所以弹性吊索的张力F的估计值F=(TL+TR)/2。
至此弹性吊索张力计算模型推导完成,过程简易明了,但手工计算略为繁琐,为满足工程需要,本研究按照求解过程进行计算机编程,以更快速地获得计算结果。
3 试验验证
3.1 试验过程
为覆盖计算模型中所有的计算工况(坡道与竖曲线),选取了成渝高速铁路内江北站区间内位于变坡点附近的整锚段接触网(支柱号7 号~35 号)作为试验对象。试验流程如图8所示,包含了仿真验证与现场测试验证两部分。首先,现场采集整锚段接触网的几何参数,并使用接触式弹性吊索张力测量仪测量了弹性吊索张力。然后在仿真验证部分,利用采集的弹性吊索张力信息、线路参数以及接触网几何参数等其他测量信息,构建接触网的静力学有限元仿真模型,之后从仿真模型中提取2.1 节中的特征参数,再利用2.2 节中的模型计算出弹性吊索张力,并与仿真模型中的弹性吊索张力输入值进行比对。在现场试验验证部分,利用仪器测量出现场接触网特征参数,计算出张力后,与非接触式测量仪器的数值进行比对。

图8 计算模型试验过程Fig.8 Verification process of calculation model
试验所用弹性吊索接触式测量仪器如图9 所示,该仪器采用静力横张法进行测量,其工作原理为:仪器通过夹持点A,B和C与弹性吊索固定,在夹持点B处施加径向力,使得弹性吊索在B处产生纵向位移。施加径向力后,径向力与两侧的弹性吊索张力三者处于静力平衡状态,由此可求解出弹性吊索张力。该仪器标称误差在5%以内。

图9 弹性吊索张力测量仪Fig.9 Tension measuring instrument of elastic slings by contact
3.2 试验方法
3.2.1 仿真试验
仿真实验用以评估张力计算模型与有限元方法的相似程度,以验证计算模型的理论准确性。
利用文献[22]中已验证的接触网有限元仿真模型搭建方法构建仿真模型,考虑接触线、承力索、弹性吊索与吊弦4种零部件。接触线、承力索与弹性吊索具有张力大、结构长、弛度大的特点,因此采用三维杆单元建模;吊弦悬挂于接触线与承力索之间并承受接触线的拉拽力,由于吊弦可能产生松弛状态,因此采用只受拉力不受压力的索单元进行等效。同时,建立模型时考虑实际线路的曲线与竖曲线参数,以得到接触网三维模型。
具体仿真试验的开展步骤如下。
1) 模型建立:根据现场采集的接触网几何参数、弹性吊索张力参数以及如表1 所示的材料信息表,采用有限元方法,利用拉索单元建立仿真模型,如图10所示。

表1 有限元模型相关材料参数Table 1 Material parameters of the finite element model
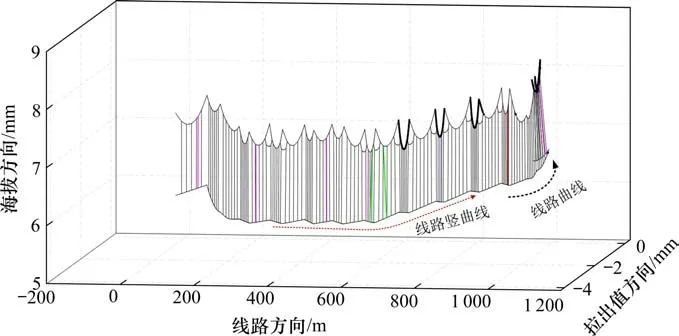
图10 接触网仿真三维模型Fig.10 3-D model of catenary simulation
2) 参数提取:如图11(a)所示,分别以1~11号弹性吊索为对象,从模型中提取关键节点的空间位置坐标,并通过简单计算转换为2.1 节中所述的结构特征参数,以6号弹性吊索为例,参数提取过程如图11(b)所示。

图11 参数提取示意图Fig.11 Schematic diagram of parameter extraction
3) 计算与结果对比:以步骤2中的提取出的特征参数为输入,采用2.2 节中的算法计算出弹性吊索张力值估计值,并与弹性吊索张力的仿真输入值进行比对。
3.2.2 现场测量试验
现场试验用以评估非接触测量方法的计算结果与如图9 所示的弹性吊索张力测量仪之间的偏差,以验证非接触测量方法的实用性。弹性吊索张力实测的流程如图12所示。

图12 现场测量试验流程Fig.12 Progress of the tension measurement test
具体现场测量试验的开展步骤如下。
1) 参数采集与整理:以试验锚段内的11 根弹性吊索为测量对象,利用图12 所示的激光测量仪测量接触线高度参数与弹性吊索高度参数,利用卷尺测量距离参数,测量的具体示意见图3,测量完成后的数据进行汇总与整理。
2) 软件计算:利用由西南交通大学电气工程学院开发的配套计算软件系统,以步骤1中整理后的测量数据为输入,批量计算出弹性吊索张力。配套软件的界面功能如图13 所示,该软件是本文方法的快速实现工具,能够根据工程现场的线路与材料参数以及测量数据批量计算出弹性吊索张力,降低现场人员对本方法的应用难度。

图13 配套计算软件Fig.13 Calculation software of this method
3) 结果评估:将配套软件计算出的11 根弹性吊索张力的结果,与使用图9所示的弹性吊索张力接触式测量仪所得出的结果进行比对,分析非接触式测量方法与既有的接触式测量方法的偏差,以评估非接触方法的工程适用性。
3.3 试验结果分析
试验的结果如表2 所示,在用以实验的11 组弹性吊索中,利用仿真参数计算的弹性吊索张力估计值与仿真模型的输入值的最大偏差为135.8 N,平均偏差为67.8 N;利用非接触式采集数据所计算的张力估计值,与接触式仪器之间的最大偏差为203.5 N,平均偏差为112.6 N。张力计算的结果统计如图14所示。

表2 相关试验结果Table 2 Test results
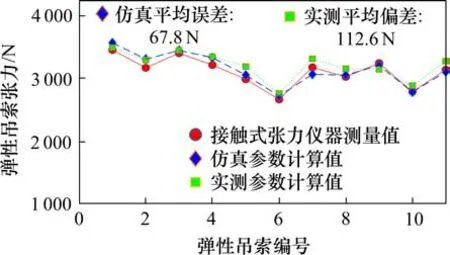
图14 验证试验结果Fig.14 Results of the verification test
统计11 组计算数据可知,非接触测量方法与有限元方法模拟出的弹性吊索张力最大误差为4.7%,平均误差为2.3%;与接触式测量仪器的测量结果最大偏差为7.4%,平均偏差为3.8%。实验各组的精度统计如图15所示,最大的误差出现在4号弹性吊索位置。

图15 弹性吊索张力计算精度对比Fig.15 Comparison of calculation accuracy
试验结果说明,所提出的解析模型与有限元方法的误差较小,证明了解析模型的理论性,利用该解析模型测定的接触网弹性吊索张力与接触式弹性吊索测量仪器的测量值误差小,具有一致性,证明了该方法的工程适用性。
4 结论
1) 利用几何原理与力矩平衡等数学方法,解析了弹性吊索的受力变形情况,考虑了线路坡道对接触线高度的影响,最终建立了基于接触网几何参数信息的弹性吊索张力的数学表征模型。经实验,该解析模型与有限元模拟方法的平均误差为2.3%。
2) 弹性吊索非接触式测量方法可应用于实际工程测量中,经实验,该方法与接触式测量仪器间的测量平均偏差为3.8%,可认为两者的测量值具有一致性。非接触式测量方法在功能上能够代替接触式测量仪器,且具有非天窗点测量、单人测量和随车测量等更灵活的应用场景。
3) 非接触式测量方法能够大幅度减少弹性吊索张力测量的准备条件,即避免停电作业与上线作业的准备工作,实现弹性吊索状态的带电检测与地面测量,提高了测量的安全性、灵活性与便捷性。
