地下轮式内燃铲运机铲斗设计与仿真
2023-09-15易望远尹瑞雪
易望远 尹瑞雪
摘 要:针对传统铲斗设计方式复琐的问题,提出了一种逆向设计的新思路。论文以斗容量为4 m3的地下轮式内燃铲运机铲斗为研究对象,进行铲斗设计并运用UG建立铲斗的三维有限元模型。根据铲斗工作时的实际情况,对所设计铲斗的斗体和铲斗刃选择不同的材料和厚度,分析铲斗在铲取工况和转斗时所受的载荷,并进行静态结构有限元仿真和模态分析,得到了整个铲斗装配体的应力、位移分布和各阶模态下的变形量。有限元仿真和模态分析的结果表明:这种逆向设计思路具有可行性,所设计铲斗结构可靠。有限元仿真的结果为进一步研究铲斗的结构优化提供依据;模态分析的结果可以避免铲运机工作机构整体设计时共振发生,也为工作机构动力学仿真奠定基础。
关键词:铲斗;地下轮式内燃铲运机;有限元仿真;模态分析
中图分类号:TH225
文献标志码:A
随着近几十年来地球矿产资源不断的被挖掘和开采,地球表面的总矿产资源已经是越来越少,采矿早已开始逐渐转向地下深处开采。地下铲运机作为开采地下矿产资源作业中的重要运输机械,小型地下铲运机已经无法满足人们对井下矿产开采效率要求,因此,对中型与大型地下铲运机的研究具有重要的现实意义。铲斗作为铲运机重要的工作机构,铲斗设计的好坏直接影响矿产资源开采效率。
地下铲运机是高效率的装运卸作业的地下无轨铲运设备[1]。地下铲运机在我国的第一次的使用是在1975年,从波兰引进的型号为LK-1的铲运机[2],因LK-1在当时的开采作业中展示出的高效率,此后地下铲运机开始在我国得到广泛的关注和研究。以往许多学者大多关注地下铲运机铲斗举升过程中铲斗的平移性和其最大卸载高度的研究[3-6],徐庆斌[7]在对地下铲运机工作机构强度分析时,考虑了焊缝对动臂强度的影响,运用ANSYS Workbench对铲斗及正六连杆机构进行了有限元仿真分析。王海芳等[8]通过利用SolidWorks对ZL08-Ⅱ型轮式装载机的铲斗进行了有限元仿真校核了其铲斗的强度,并对铲斗进行了疲劳分析。但他们对铲斗强度有限元分析研究时,对铲斗装配体只选择一种材料,忽略了实际生产中铲斗的斗体与铲斗斗刃材料的不同。
本文针对传统铲斗设计方式(以前车轴距、轮胎宽度等参数进而设计铲斗宽度的方式)复杂的问题,提出了一种逆向设计的新思路,使铲斗设计更加简便。针对以往铲斗有限元仿真中忽略铲斗体和斗刃材料不同和厚度不同的问题,本文运用UG软件对设计的铲斗模型进行了三维建模,并赋予铲斗斗体和斗刃这两部分不同材料属性和厚度,然后运用了有限元法和模态分析法分析验证所设计铲斗模型的合理性。
1铲运机铲斗设计
运用柴油铲运机额定斗容量x(m3)与其主要参数之间的近似公式如式(1)[9]所示。
B=1.31x0.381(1)
式中,B為铲斗宽度,m;为斗容量,m3。
可获得铲斗宽度B=2.22 m,以其为铲运机铲斗宽度的设计值。
1.1 铲斗形状参数的确定
影响铲斗的截面形状及其性能的主要参数有底壁长、张开角、铲斗圆弧半径r以及后壁高四个参数[10],铲斗的截面形状如图1。进行铲斗形状设计时,铲斗的其他参数都与回转半径R构成函数关系,所以只要计算出回转半径就可以利用函数关系算出其他参数,其计算如公式(2)至(4)[2]所示。
式中,Vr为铲斗的额定容量,m3;B0为铲斗的内侧宽度,m;λg为铲斗的斗底直线段长度系数,其取值为1.40~1.53;λz为后壁的长度系数,其取值为1.1~1.2;λk为挡板的高度系数,其取值为0.12~0.14;λr为斗底圆弧的半径系数,其取值为0.35~0.4;γ为开口角,其一般取45°~52°;γ1为挡板与后壁间的夹角,其一般取5°~10°,选择γ1时应保证侧壁切削刃与挡板间的夹角为90°。
由设计要求得Vr=4 m3。
铲斗的内侧宽度的计算如式(5)[2]所示。
B0=B-2a(5)
式中,B为铲运机机器宽度,m;a为铲斗侧壁刃厚度,m。
取a=0.02 m,并代入式(5)得B0=2.18 m。
本文设计参数选取情况如下,λg=1.42,γ=48°,γ1=10°,λz=1.15,λk=0.14,λr=0.38。
将上述参数代入式(2)、(3)和(4)中,计算得出回转半径R=1.777 m。
根据斗底长度、斗后壁长、斗底圆弧半径与回转半径的关系可以得出它们的尺寸。
斗底圆弧半径:r=Rλr=0.675 m。
斗底长度:Lg=Rλg=2.524 m。
斗后壁长:Lz=Rλz=2.044 m。
挡板高度:a=Rλk=0.249 m。
1.2 铲斗容量计算与误差分析
铲斗容量作为地下铲运机的主要参数之一,现已系列化,其计算与误差分析也已标准化[10]。
(1)铲斗容量计算
铲斗的额定容量计算公式如式(6)[10]所示。
式中,S为平装容量的横截面积,m2;a为挡板高度,m;B0为铲斗的开口长度,m;c为铲斗装满时物料的堆积高度,m。
(2)平装容量横截面S的计算
平装容量横截面简图如图2所示。
S的计算方法如式(7)所示。
S=S1+S2+S3+S4+S5(7)
式中,S1为扇形AFE的面积,m2;S2为直角三角形△AFB的面积,m2;S3为三角形△FBD的面積,m2;S4为直角三角形△FDE的面积,m2;S5为三角形△BCD的面积,m2。
由图2可清晰计算出各分割面积,通过计算求解得到S=2.32 m2。
(3)铲斗开口长b和堆积高度c的计算
b的计算:由余弦定理可得计算公式如式(8)所示。
计算得b=1.909 m。
c的计算:由作图法确定,作图法步骤如下,先作CD的中垂线交CD于点G,中垂线交BD于点H,再过G点在其向铲斗外的中垂线上取点I,使GI的长度为DG的一半,HI即等于c,如图2所示,也可用数学方法推导c的计算公式如式(9)所示。
运用CAD作图法,计算得c=0.607 m。
将上述已计算出的参数代入公式(6)中,得Vh=4.014 m3。
(4)铲斗的容量误差分析
如果上述计算出Vh能满足铲斗的容量误差公式,如式(10)[10]所示。
|Vr-Vh|<ε(10)
式中,Vr为额定斗容量,m3;Vh为计算斗容量,m3;ε允许斗容量的误差值。
当斗容量为4 m3时,ε=0.2 m3[10]。代入公式(10)计算得0.014<0.2 m3。
所设计的铲斗容量满足设计要求。
设计铲斗侧刃与铲斗刃的夹角为62°,铲斗斗体选择厚度20 mm的合金结构钢焊接而成,斗刃厚度设计为40 mm,材料选择耐磨材料[11]。铲斗的下铰点离铲斗斗底距离为210 mm;上铰点位置是以下铰点为圆心,1 080 mm为上下两铰点距离,两铰点连线与铲斗回转半径R(如图1所示)的夹角103°。铲斗形状参数汇总如表1所示。
2 铲斗外载荷的计算
地下铲运机典型工况下一般工作阻力通常可分成插入料堆的插入阻力、进行升举时的剪切力[2,12]。
铲斗插入料堆的插入阻力计算公式如式(11)[13]所示。
Fx=9.8K1K2K3K4BL1.25(11)
式中,K1为物料块度与松散程度系数;K2为物料性质系数;K3为料堆高度系数;K4为铲斗形状系数,一般在1.1~1.8之间,对于前刃不带齿的铲斗,K4取较大值;B为铲斗宽度,cm;L为铲斗的一次插入深度,cm。
取K1=0.75,K2=0.17,K3=0.8,K4=1.6。
由前文设计可知:B=222 cm,L=101 cm。
将上述参数代入公式(11)得Fx=113 684.4 N。
铲斗开始举升时物料的剪切力计算公式如式(12)[13]所示。
Fy=2.2KBL(12)
式中,K为开始举升铲斗时物料的剪切应力,它通过试验测定,对于块度为0.1~0.3 m的松散花岗岩,剪切应力的平均值取K=35 000 Pa;B为铲斗宽度,m;L为铲斗完全插进料堆的长度,m。
取K=35 000代入公式(12)得Fy=172 649.4 N。
3 铲斗有限元仿真
3.1 铲斗材料选择
因铲斗在铲装作业中是直接与矿物物料直接接触,长期作业,铲斗斗刃极易磨损,而铲斗耳板在铲取工作中承受绝大部分载荷。故斗刃和耳板材料都选择16MnCr5,其材料属性参数如表2所示;斗体材料选择合金结构钢Q345,其材料属性参数如表3所示。
材料16MnCr5在UG NX12中对应的材料名称为AISI_Steel_Maraging;故仿真时只需在UG中创建Q345的材料属性。
3.2 固定约束的确定和网格的划分
由于地下铲运机的大臂和摇臂与铲斗的连接是采用密封式铰销连接,故在进行有限元分析时,铲斗耳板连接处相当于固定约束,限制了铲斗的自由度。铲斗的网格划分是选用3D四面体CETRA(10)类型划分,单元大小为16 mm,雅克比为4,单元数296 710,划分结果如下图3所示。
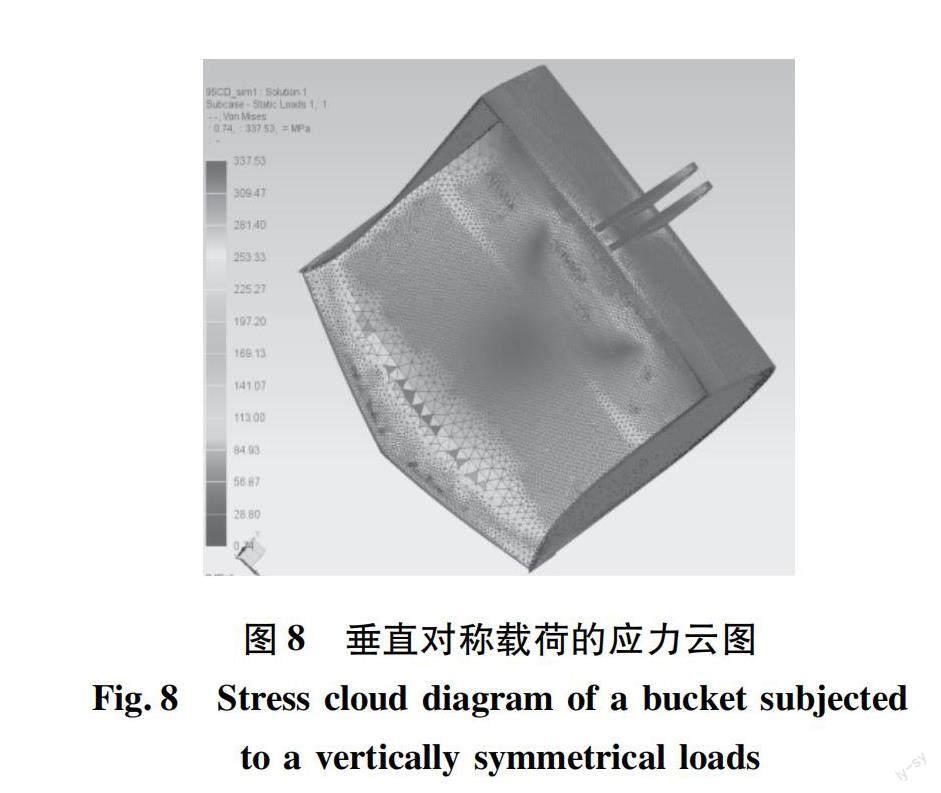
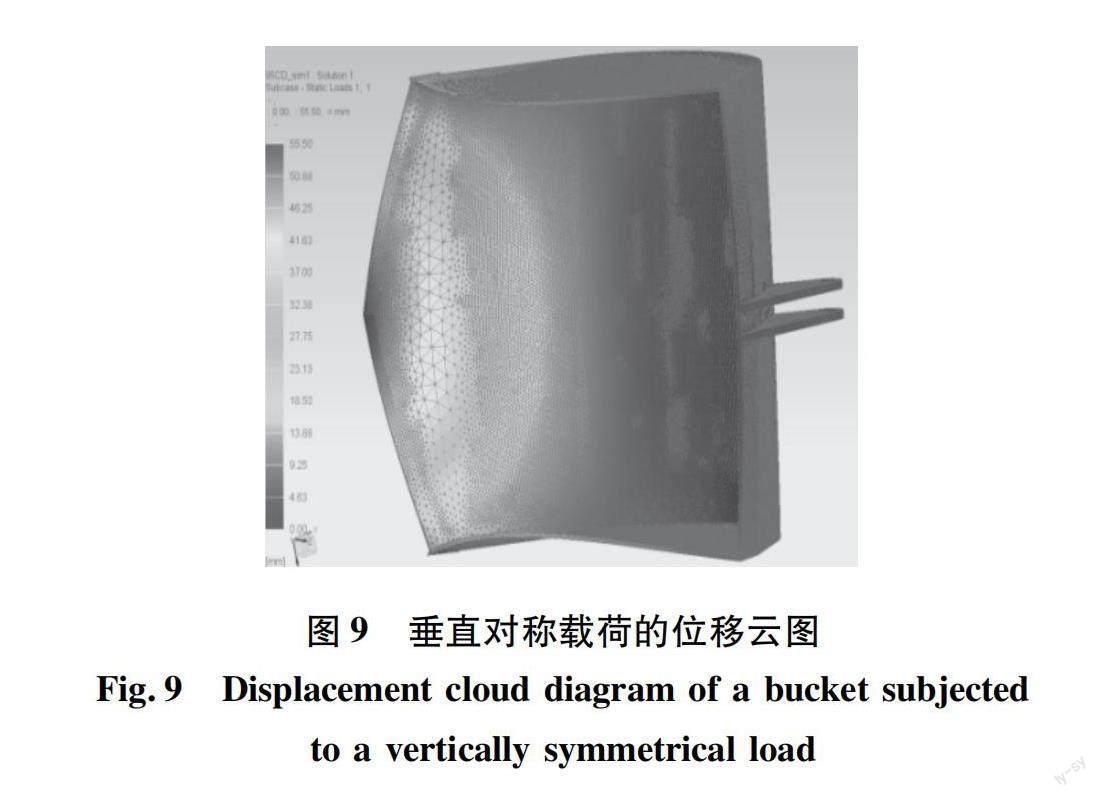
本文有限元仿真只考虑两种常见的工况,即受水平对称载荷和垂直对称载荷,这两种对称载荷情况分别如图4和图5所示。
由两次仿真结果可知,铲斗在水平对称载荷作用下最大应力为119.4 MPa发生在耳板处,远小于耳板材料的许用应力988 MPa;铲斗在垂直对称载荷作用下最大应力为337.5 MPa,发生在斗刃处,而此时斗体最大应力小于253.3 MPa,斗刃材料的许用应力为988 MPa、斗体材料的许用应力为260 MPa,故强度上符合要求。根据两次仿真的位移云图可知,在两种工况载荷下铲斗最大位移均发生在斗刃处,故可在相应部位设计加强筋。
4 铲斗的模态分析
铲斗是地下铲运机铲取矿物的重要承力部件,在进行铲取作业中,当铲斗振动频率与外部载荷激励频率相近时,易因共振造成铲斗损坏。运用ANSYS的模态分析可以确定铲斗的固有频率数值,延长铲斗使用寿命[14-15]。
4.1 建立铲斗有限元模型
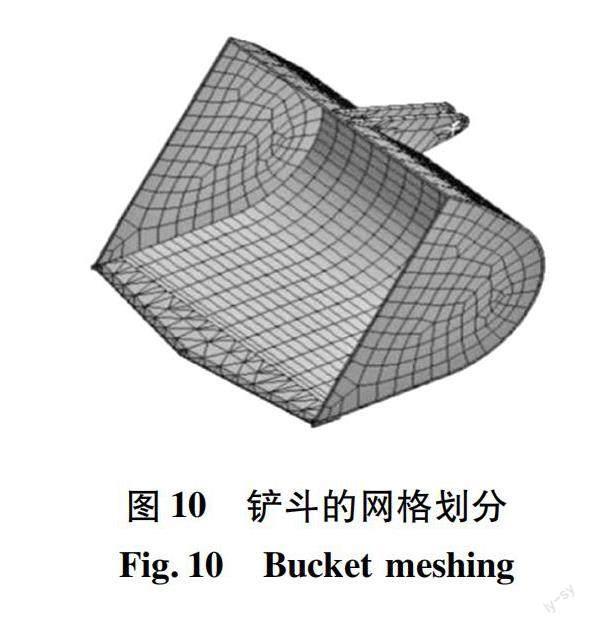
在ANSYS中,铲斗材料设置同表2、表3,选择四面体单元作为铲斗的单元格,网格划分后节点数9 110,单元数1 461,如图10所示。
4.2 模态分析过程与结果
设置模态阶数为6,各阶频率如表4所示,求解后得到各階频率下铲斗的变形情况(变形量单位为mm),如图11所示。
由图11可知,铲斗在一阶模态频率3.987 9 Hz时,铲斗变形量最小,其变形量为0.042 761 mm。在六阶模态频率32.649 Hz时,变形量最大,此时铲斗的最大变形量为0.065 912 mm。铲斗在前六阶模态分析中,变形量极小,说明所设计铲斗受外界振动激励影响小,结构稳定可靠。但在铲运机工作机构整体设计时,液压缸选型应避免选择频率为32.649 Hz的液压缸。
5 结论
1)本文以铲斗斗容与铲运机机器宽度的近似算法出发设计铲斗,相比于传统铲斗宽度设计更加简便,为地下轮式内燃铲运机铲斗设计提供一个新思路。
2)本文运用UG NX12对设计斗容量4 m3的地下轮式铲运机铲斗进行三维建模,对铲斗体与斗刃赋予不同材料属性,并进行有限元分析。仿真结果表明铲斗在水平对称载荷作用下最大应力为119.4 MPa,发生在耳板处;铲斗在垂直对称载荷作用下最大应力为337.5 MPa,发生在斗刃处。铲斗在运用ANSYS模态分析中,发现模态频率为32.649 Hz时,其最大形变量为0.065 912 mm,说明所设计铲斗受外界振动激励影响小,结构稳定可靠。
参考文献:
[1]张栋林. 地下铲运机[M]. 北京: 冶金工业出版社, 2002.
[2] 连晋毅. 铲土运输机械设计[M]. 北京: 机械工业出版社, 2012.
[3] 冯茂林, 周军. CY-4型地下内燃铲运机[J]. 有色金属(矿山部分), 1999(3): 23-25,31.
[4] 李遵领. 2 m3遥控地下铲运机动力传动系统及执行机构设计[D]. 成都: 电子科技大学, 2010.
[5] 任娜. 2.2~3 m遥控地下铲运机动力传动系统及执行机构设计[J]. 科技风, 2017(24): 140.
[6] 马凤苹, 林广旭. 防爆柴油铲运机工作机构设计[J]. 煤矿机电, 2017(4): 33-35,40.
[7] 许庆斌. 基于焊缝影响的地下铲运机工作机构强度和动力学分析[D]. 淄博: 山东理工大学, 2017.
[8] 王海芳, 汪澄, 戴亚威. 装载机铲斗有限元及疲劳分析[J]. 煤矿机械, 2016, 37(1): 96-98.
[9] 高梦熊. 地下装载机[M]. 北京: 冶金出版社, 2011.
[10]高梦熊. 地下装载机:结构、设计及使用[M]. 北京: 冶金工业出版社, 2002.
[11]高梦熊. 中型地下装载机工作装置的合理结构[J]. 矿山机械, 2000(3): 27-29.
[12]张元清, 郭鑫, 姜勇, 等. 地下铲运机铲装阻力分析[J]. 机械制造, 2022, 60(2): 17-21.
[13]张元清, 郭鑫, 赵晓燕, 等. 地下铲运机不同铲装方式下的离散元仿真研究[J]. 有色金属(矿山部分), 2021, 73(6): 72-78,85.
[14]李万全. ANSYS 14.5机械与结构分析实例详解[M]. 北京: 机械工业出版社, 2014.
[15]李志虎. 基于CAE的挖掘机铲斗模态及运动分析[J]. 工程机械文摘, 2021(3):1-5.
(责任编辑:于慧梅)
Underground Wheeled Internal Combustion Scraper Bucket Design and Simulation
YI Wangyuan, YIN Ruixue*
(School of Mechanical Engineering, Guizhou University, Guiyang 550025, China)
Abstract: A new idea of inverse design is proposed for the problem of cumbersome traditional bucket design. Then, the bucket of a 4 m3 bucket capacity underground wheeled internal combustion scraper is used as the object of study, and the bucket design is carried out and the three-dimensional finite element model of the bucket is established by using UG. The bucket body and bucket blade are made of different materials and thicknesses according to the bucket working conditions, and the loads on the bucket during the bucket pickup and bucket rotation are analyzed. The results of finite element simulation and modal analysis show that this reverse design is feasible and the designed bucket structure is reliable. The results of the finite element simulation provide a basis for further research on the optimization of the bucket structure; the results of the modal analysis can avoid the occurrence of resonance in the overall design of the working mechanism of the shovel, and also lay the foundation for the simulation of the working mechanism dynamics.
Key words: bucket; underground wheeled internal combustion scraper; finite element simulation; modal analysis
