某非承载式SUV制动跑偏故障分析
2023-08-18刘任忠王清山饶立群孙志明牛劭刚
刘任忠 王清山 饶立群 孙志明 牛劭刚

摘 要:针对某非承载式SUV在道路试验过程中发生的制动右偏现象,分析导致制动右偏的各种因素,排查制动系统、转向系统、悬架参数和零部件以及车架精度后,发现左下摆臂安装点位置精度超出设计公差。然后将故障车辆前悬架的硬点带入ADAMS模型进行仿真分析,仿真分析结果与故障车辆制动跑偏方向一致,确认真因为悬架安装点位置精度不满足设计要求。通过深入调查发现是由于车架横梁在生产过程中缺少工装,导致车架精度较差,后续车架生产过程中增加工装约束,保证车架精度,解决了制动跑偏问题。
关键词:制动右偏;ADAMS模型;车架精度
中图分类号:U463.2 文献标识码:A 文章编号:1005-2550(2023)04-0068-04
Analysis of Brake Deviation Fault in a Non load Bearing SUV
LIU Ren-zhong, WANG Qing-shan, RAO Li-qun, SUN Zhi-ming, NIU Shao-gang
( Zhengzhou Nissan Automobile Co.,Ltd, Zhengzhou 441004, China )
Abstract: In response to the braking right deviation phenomenon of a non load bearing SUV during road testing, various factors causing braking right deviation were analyzed. After investigating the braking system, steering system, suspension parameters and components, as well as the accuracy of the frame, it was found that the installation point accuracy of the left lower swing arm exceeded the design tolerance. Then, the hard points of the front suspension of the faulty vehicle were brought into the ADAMS model for simulation analysis. The simulation analysis results were consistent with the brake deviation direction of the faulty vehicle, confirming that the true cause of the malfunction is that the suspension installation point accuracy did not meet the design requirements. Through in-depth investigation, it was found that the lack of tooling during the production process of the frame crossbeam resulted in poor frame accuracy. In the subsequent frame production process, tooling constraints were added to ensure frame accuracy and solve the problem of brake deviation.
Key Words: Brake Right Deviation; ADAMS Model; Frame Accuracy
1 引言
汽车在行驶过程通常会按照驾驶员规定的方向直线行驶,而制动跑偏就是车辆在制动过程中,偏离直线行驶状态,自动偏左或偏右行驶。若汽车制动系统出现这种跑偏情况就会使汽车在行驶过程中安全性能降低,甚至导致严重的交通安全事故。
导致车辆制动跑偏问题的原因有很多,车辆出现状态稳定或批量性的跑偏现象通常来源两个方面,一是汽车左、右车轮,特别是前轴左、右车轮(转向轮)制动器的制动力不相等,二是制动时悬架导向杆系与转向系拉杆在运动学上的不协调(互相干涉)[1]。针对某非承载式SUV在道路试验中出现向右制动跑偏问题,采用排除法确定真因,并提出解决方案。
2 影响汽车制动跑偏的因素
2.1 汽车制动系统
一般情况下,汽车在行驶中利用制动系统制动时,如果只考虑车轮的运动为滚动和抱死状态,当制动力较小时,即车轮未抱死时,车辆的制动力主要取决于制动器的制动力;当制动力较大时,即车轮抱死拖滑,车辆的制动力主要取决于地面制动力。汽车行驶时,如果同轴左右制动器产生的制动力大小差异过大,就会导致汽车在制动过程中出现跑偏现象。可能原因是制动钳总成活塞卡滞,制动盘、摩擦片异常磨损、制动油管堵塞、有氣泡等[2]。
2.2 汽车转向系统
汽车转向系统出现故障也会导致车辆跑偏,比如转向拉杆球头出现松旷,转向器的间隙过大,转向响应的灵敏度降低等等,出现上述类似问题,都需要对转向系统进行调整、改善,严重时甚至需要更换相应零部件。另外,现在大部分汽车都采用电动助力转向系统,即EPS,通常需要接受转角传感器发出的方向盘转角信号,根据转角信号以及车速确认助力转矩或回正力矩,如果转角传感器未进行校准0位,车辆在直线行驶时可能会导致EPS向右(或向左)产生回正力矩,影响车辆直线行驶,同时也造成车辆制动跑偏。
2.3 汽车悬架系统
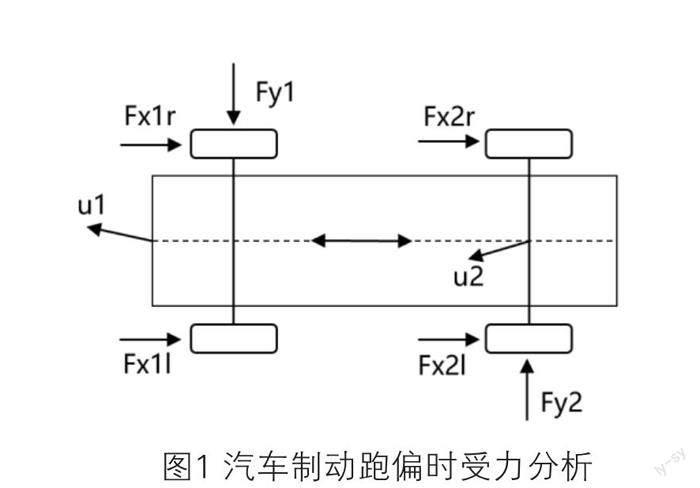
悬架系统引起的车辆制动跑偏原因较为复杂:如四轮定位超差、悬架安装点的精度不符合要求,或者悬架系统运动副出现卡滞、松动等,均会导致车辆正常行驶时制动跑偏。例如,图1为汽车制动跑偏时受力分析,虽然方向盘没有动,但由于悬架系统和转向系统各处的间隙以及零部件的弹性变形,转向轮仍然会产生向右转动的角度导致向右跑偏[3]。
2.4 其它因素
其它还有很多因素都可能会导致制动跑偏,比如轮胎、轮荷、道路路面等[4]。汽车在正常行驶时进行制动以后,除了需要制动系统提供制动力以外,轮胎和地面的附着力也是一个重要因素。如果同轴上轮胎的气压和花纹磨损程度出现不一致,会导致轮胎与地面附着系数存在差异,进而导致制动跑偏。而且同轴上左右两轮的载荷相差过大,会导致左右车轮产生的制动力相差过大,也会导致跑偏情况出现。另外,当车辆行驶在崎岖、泥泞或者雨雪路面时,如果紧急制动,很容易引起跑偏现象,虽然这种情况不是由汽车制动系统的问题,但也是制动跑偏的一个影响因素,所以驾驶员也应当注意。
3 制动跑偏的原因分析及改进措施
3.1 汽车制动跑偏问题描述
某非承载式SUV以80km/h以上车速在车道中间行驶时,车身宽度为1.85m,缓踩制动踏板长距离制动时车辆向右跑偏。具体表现形式如下:1、车辆以100km/h车速在车道中间直线行驶,然后以0.3g减速度制动,车辆停止以后向右偏出3.5m宽的试验车道,试验评价标准为制动过程中任何部位(不计入车宽的部位除外)不允许超出试验车道。2、车辆以80km/h车速在车道中间直线行驶,然后以0.6g减速度制动,车辆停止以后向右跑偏量0.7m,超出试验评价标准允许向右跑偏量0.5m。
3.2 诊断汽车的制动系统
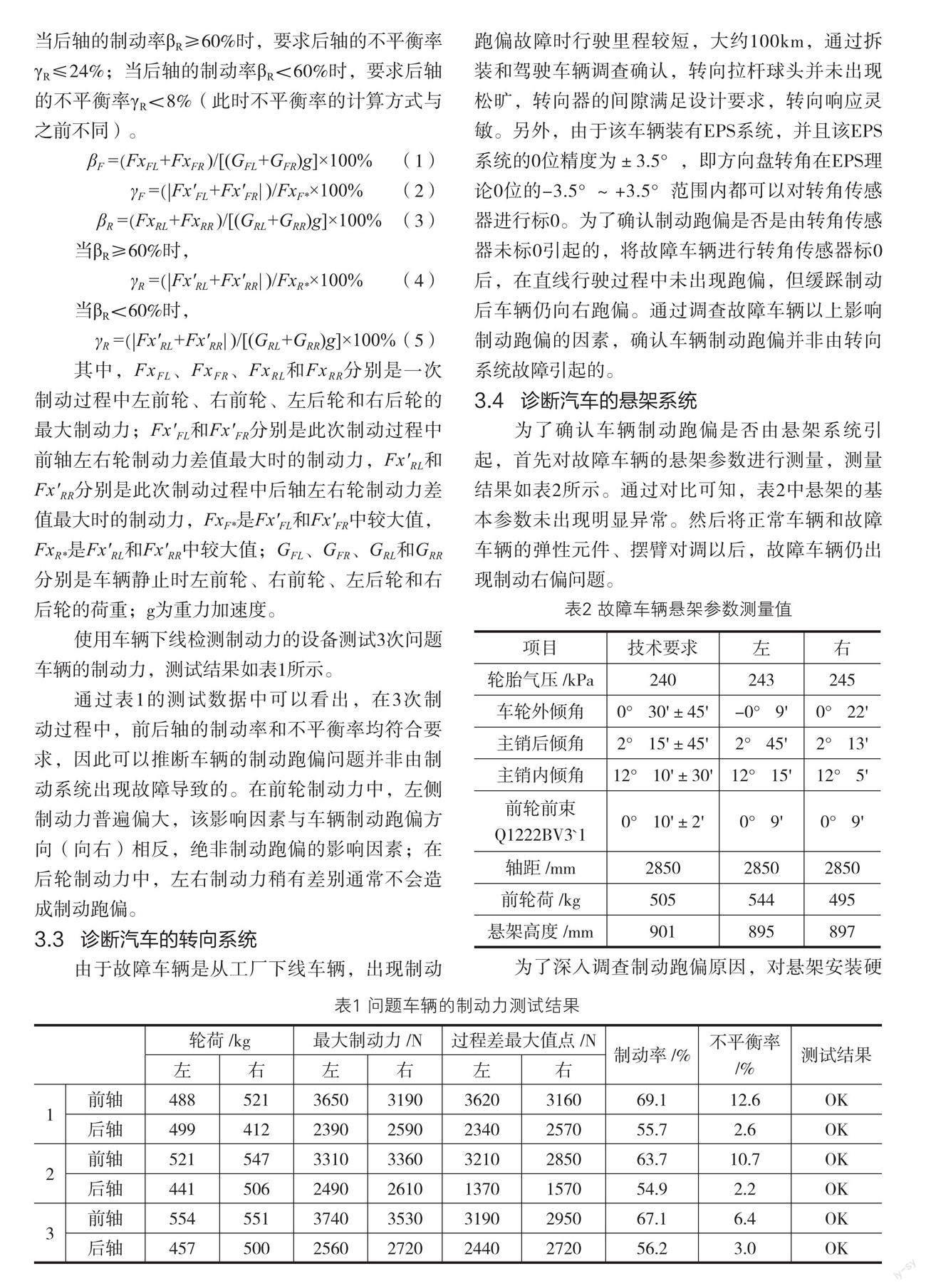
左、右车轮制动力差异过大是导致汽车出现制动跑偏的一个重要原因,同时也可以直接反映汽车制动跑偏是否是由制动系统的零部件出现故障导致。GB 7258-2017对新车辆前轴和后轴的制动力有以下要求[5]:1、前轴的制动率βF≥60%,不平衡率γF≤20%;2、后轴的制动率βR≥20%,但当后轴的制动率βR≥60%时,要求后轴的不平衡率γR≤24%;当后轴的制动率βR<60%时,要求后轴的不平衡率γR<8%(此时不平衡率的计算方式与之前不同)。
βF =(FxFL+FxFR )/[(GFL+GFR)g]×100% (1)
γF =(|Fx'FL+Fx'FR| )/FxF*×100% (2)
βR =(FxRL+FxRR )/[(GRL+GRR)g]×100% (3)
当βR≥60%时,
γR =(|Fx'RL+Fx'RR| )/FxR*×100% (4)
当βR<60%时,
γR =(|Fx'RL+Fx'RR| )/[(GRL+GRR)g]×100%(5)
其中,FxFL、FxFR、FxRL和FxRR分别是一次制动过程中左前轮、右前轮、左后轮和右后轮的最大制动力;Fx'FL和Fx'FR分别是此次制动过程中前轴左右轮制动力差值最大时的制动力,Fx'RL和Fx'RR分别是此次制动过程中后轴左右轮制动力差值最大时的制动力,FxF*是Fx'FL和Fx'FR中较大值,FxR*是Fx'RL和Fx'RR中较大值;GFL、GFR、GRL和GRR分别是车辆静止时左前轮、右前轮、左后轮和右后轮的荷重;g为重力加速度。
使用车辆下线检测制动力的设备测试3次问题车辆的制动力,测试结果如表1所示。
通过表1的测试数据中可以看出,在3次制动过程中,前后轴的制动率和不平衡率均符合要求,因此可以推断车辆的制动跑偏问题并非由制动系统出现故障导致的。在前轮制动力中,左侧制动力普遍偏大,该影响因素与车辆制动跑偏方向(向右)相反,绝非制动跑偏的影响因素;在后轮制动力中,左右制动力稍有差别通常不会造成制动跑偏。
3.3 诊断汽车的转向系统
由于故障车辆是从工厂下线车辆,出现制动跑偏故障时行驶里程较短,大约100km,通过拆装和驾驶车辆调查确认,转向拉杆球头并未出现松旷,转向器的间隙满足设计要求,转向响应灵敏。另外,由于该车辆装有EPS系统,并且该EPS系统的0位精度为±3.5°,即方向盘转角在EPS理论0位的-3.5°~ +3.5°范围内都可以对转角传感器进行标0。为了确认制动跑偏是否是由转角传感器未标0引起的,将故障车辆进行转角传感器标0后,在直线行驶过程中未出现跑偏,但缓踩制动后车辆仍向右跑偏。通过调查故障车辆以上影响制动跑偏的因素,确认车辆制动跑偏并非由转向系统故障引起的。
3.4 诊断汽车的悬架系统
为了确认车辆制动跑偏是否由悬架系统引起,首先对故障车辆的悬架参数进行测量,测量结果如表2所示。通过对比可知,表2中悬架的基本参数未出现明显异常。然后将正常车辆和故障车辆的弹性元件、摆臂对调以后,故障车辆仍出现制动右偏问题。
为了深入调查制动跑偏原因,对悬架安装硬点三坐标进行测量确认,发现左下摆臂安装点位置精度(+6)超出设计公差(±1.5),不满足设计要求。将前悬架的硬点带入ADAMS模型进行仿真分析,分析结果如图2所示,其中规定左、右车轮向内侧偏转的角度为正。从图2的曲线中可以看出,汽车开始制动以后,随着制动力增大,左、右前轮均向外侧开始偏转,并且右前轮向外侧偏转的角度变化更大,车辆制动时向右跑偏,与故障车辆制动跑偏表现相同,因此悬架安装点位置精度不满足设计要求为导致故障车辆发生制动跑偏的主要原因。
3.5 改进措施
通过对相关系统的逐步排查,最终确定是由于车架前悬架安装点位置精度不满足设计要求导致车辆制动右偏。经过去工厂深入调查车架的生产过程,发现首批调试下线车辆车架横梁工装缺失,导致车架精度较差,缺少工装的横梁如图3中②号零件。为了解决制动跑偏问题,对生产的车架横梁增加工装约束,保证车架精度(尤其是前悬架安装点的位置精度)在设计要求范围内以后,车辆再未出现制动跑偏现象。
4 结论
车辆出现制动跑偏问题会使车辆安全性能降低,严重时可能造成交通事故,产生制动跑偏的因素有很多。本文通过对故障车辆的制动系统、转向系统、悬架系统的调查分析,故障车辆的制动系统、转向系统以及悬架系统的悬架参数、弹性元件和摆臂均满足设计,但通过测试前悬架安装硬点的三坐标,发现左下摆臂安装点位置精度(+6)超出设计公差(±1.5),不满足设计要求。将前悬架的安装硬点带入ADAMS模型进行仿真分析,发现随着制动力增大,左、右前轮均向外侧开始偏转,并且右前轮向外侧偏转的角度变化更大,车辆制动时向右跑偏,与故障车辆制动跑偏表现相同。因此悬架安装点位置精度不满足设计要求为导致故障车辆发生制动跑偏的主要原因。對后续生产车辆通过增加车架前悬架横梁工装约束,保证车架精度(尤其是前悬架安装点的位置精度)在设计要求范围内以后,车辆未出现制动跑偏问题,保证车辆行驶安全。
参考文献:
[1]余志生.汽车理论[M].北京:机械工业出版社,2000.
[2]韩振宇.汽车制动跑偏原因分析及故障诊断[J].汽车与驾驶维修(维修版),2017(05):69.
[3]陆增斌.汽车制动跑偏原因分析及故障诊断[J].时代汽车,2019(11):144-145.
[4]严瑜琳.汽车制动跑偏影响因素探究[J].科技风,2020(8):123.
[5]公安部.机动车运行安全技术条件:GB 7258-2017[S]. 北京:中国标准出版社,2017:26-27.
