口袋布自动缝制设备多电机偏差耦合同步控制技术研究
2023-07-10王伟

【摘 要】 通过结合自适应RBF网络与PID控制器,设计口袋自动缝制设备多电机偏差耦合同步控制器;以口袋布自动缝制设备多电机的跟踪误差与同步误差以及对应的变化率为多电机偏差耦合同步控制器中PID控制器的输入;利用自适应RBF网络在线调整PID控制器参数,由参数调整后的PID控制器输出多电机偏差耦合同步控制量。实验证明:该技术可有效在线调整PID控制器参数,完成多电机偏差耦合同步控制;在负载干扰情况下,多电机偏差耦合同步控制的超调量较小,具备较好的同步控制抗干扰性。
【关键词】 口袋布;自动缝制设备;多电机;偏差耦合;同步控制
Research on Multi-motor Deviation Coupling Synchronous Control
Technology for Automatic Pocket Cloth Sewing Equipment
Wang Wei
(Anqing Vocational and Technical College, Anqing 246003, China)
【Abstract】 By combining adaptive RBF network and PID controller, a multi-motor deviation coupling synchronous controller for automatic pocket sewing equipment is designed. The tracking error, synchronization error and corresponding change rate of the multi-motor of the pocket cloth automatic sewing equipment are taken as the input of the PID controller in the multi-motor deviation coupling synchronization controller. Adaptive RBF network is used to adjust PID controller parameters online. The parameter adjusted PID controller outputs multi-motor deviation coupling synchronous control quantity. The experiment shows that the technology can effectively adjust the parameters of PID controller online, and complete the synchronous control of multi-motor deviation coupling. In the case of load disturbance, the overshoot of multi -motor deviation coupling synchronous control is small, and it has better anti-interference performance of synchronous control.
【Key words】 pocket cloth; automatic sewing equipment; multi-motor; bias coupling; synchronous control
〔中圖分类号〕 TB486+3 〔文献标识码〕 A 〔文章编号〕 1674 - 3229(2023)02- 0027 - 05
0 引言
传统的人工流水线加工方式,人工成本高,加工效率还低[1]。为加快生产效率,很多服装企业已经利用口袋布自动缝纫设备,替代人工流水线加工的方式[2],通过口袋布自动缝纫设备,完成全部缝制任务,提升服装企业的经济效益[3]。口袋布自动缝纫设备使用过程中,需要多个电机同时工作,而多电机因为驱动与负载扰动等因素,导致多电机同步性能较差,不能满足生产需求[4-6]。为提升口袋布自动缝纫设备的缝制精度,需研究多电机偏差耦合同步控制技术。例如,耿强[7]等人依据线性系统校正原理,设计改进型多电机偏差耦合控制器,利用输出选择函数,提升跟踪误差补偿精度。该技术可有效完成多电机偏差耦合同步控制。张永龙[8]等人按照多电机启动原理,将补偿器与偏差耦合同步控制器相结合,完成同步控制。在误差允许范围内,对多电机偏差耦合同步控制精度较高。但这两种技术均不具备自学习性,无法根据外界环境的变化,自动调整同步控制过程,影响同步控制效果。因此,研究口袋布自动缝纫设备多电机偏差耦合同步控制技术,可降低同步控制误差。径向基函数(Radial Basis Function,RBF)神经网络,具备较优的自适应学习能力,可根据外界变化,自动调整控制器参数,提升控制效果[9,10]。
1 多电机偏差耦合同步控制技术
1.1 口袋布自动缝纫设备多电机同步控制结构
RBF网络的自适应学习性能较优[11-13],为此将自适应RBF网络和PID(Proportion Integration Differentiation,比例-积分-微分)控制器相结合,设计口袋布自动缝纫设备多电机偏差耦合同步控制器,其结构如图1所示,令各台电机的给定与反馈转速为[ω*1,ω*2,…,ω*n]和[ω1,ω2,…,ωn]。
图1中,口袋布自动缝纫设备电机数量是[n];跟踪误差是[eit=ω*it-ωit-1]。电机间的同步误差是[ci1,ci2,…,cin];[eit]与[ci1,ci2,…,cin]对应的控制器输出是[hi0t,][hi1t, hi2t,…, hint];电机控制量是[hit]。
按照偏差耦合同步控制原理,定义[ci1,ci2,…,cin],表达公式如下:
将[K′P]、[K′I]与[K′D]代入式(4),获取自适应RBF网络PID控制器的最终输出[hit],即各电机的转速控制量。将其作用至口袋布自动缝制设备的各个电机内,完成口袋布自动缝制设备多电机偏差耦合同步控制。
2 实验分析
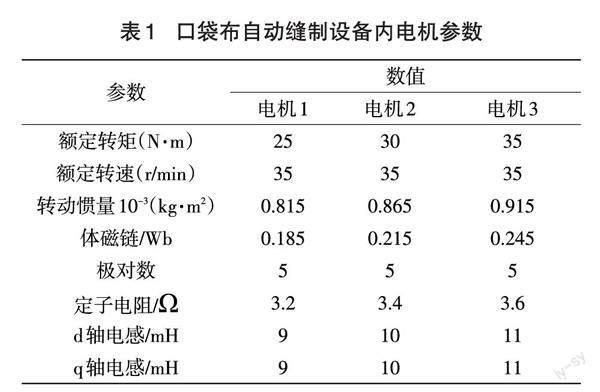
以某市一家服装企业的口袋布自动缝制设备为实验对象,该企业口袋布自动缝制设备内共包含3台电机,3台电机的具体参数如表1所示。
利用本文技术在线调整PID控制器的参数[KP]、[KI]与[KD],在线调整结果如图2所示。
根据图2(a)、图2(b)、图2(c)可知,本文技术可有效根据口袋布自动缝制设备各电机的运行情况,在线调整PID控制器的参数[KP]、[KI]与[KD],提升多电机偏差耦合同步控制器的控制效果。
利用本文技术对该企业的口袋布自动缝制设备进行多电机偏差耦合同步控制,电机转速控制结果如图3所示。
根据图3可知,本文技术可有效对口袋布自动缝制设备进行多电机偏差耦合同步控制,在1s左右,令3台电机均达到额定转速,且并未出现超调情况,控制速度较快。实验证明,本文技术具备较优的控制效果,可为提升服装缝制质量提供帮助。
在口袋布自动缝制设备运行3s时,加入负载干扰,分析本文技术在出现负载干扰时,多电机偏差耦合同步控制效果,控制结果如图4所示。
根据图4可知,当口袋布自动缝制设备运行3s左右,3台电机的转速出现波动,经过本文技术控制后,在1s左右,3台电机的转速均稳定在额定转速位置,且超调量较小。实验证明:在存在负载干扰情况下,本文技术依旧能够有效完成口袋布自动缝制设备多电机偏差耦合同步控制,且控制的适应性较强,抗干扰性能较优。
3 结语
随着人们生活水平的提升,人们对缝制质量的要求越来越高。为解决这一问题,本文研究了口袋布自动缝制设备多电机偏差耦合同步控制技术,精准控制多电机,提升缝制质量,加快缝制速度,提升了服装企业经济效益。
[参考文献]
[1] 凌軍,孙相,杜劲松.基于PLC的自动化模板缝制系统设计[J].上海纺织科技,2020,48(2):25-27.
[2] 万蓬勃,惠品品,周素静,等.基于自动化缝纫的鞋靴工艺模板研究[J].中国皮革,2019,48(12):48-54+56.
[3] 陈阳,李欣.基于分离设计与优化的多电机自抗扰协同控制[J].微特电机,2020,48(3):38-42+47.
[4] 鲁煜莹,蓝益鹏.可控励磁直线同步电机磁悬浮系统合成模糊控制的研究[J].电机与控制应用,2021,48(1):8-13.
[5] Gao Y , Ma J , Chen Q , et al. Characteristic Model-based Adaptive Fault Tolerant Control for Four-motor Synchronization Systems Considering Actuator Failure[J]. International Journal of Control, Automation and Systems, 2021, 19(12):4010-4024.
[6] 陆晟波,陈强,南余荣.多电机系统自适应非奇异固定时间同步控制[J].控制工程,2020,27(9):1545-1552.
[7] 耿强,王少炜,周湛清,等.改进型偏差耦合多电机转速同步控制[J].电工技术学报,2019,34(3):474-482.
[8] 张永龙,安跃军,张志恒,等.真空泵用多台屏蔽电机模式切换与位置补偿偏差耦合同步控制[J].电机与控制应用,2020,47(1):21-28+35.
[9] 杨赛东,张士雄,刘亚奇.基于二阶LADRC的多电机同步控制系统研究[J].机床与液压,2021,49(17):104-106+172.
[10] Gu F , Wang W , Lai L . Improved Teaching-Learning-Based Optimization Algorithm and its Application in PID Parameter Optimization[J]. International Journal of Cognitive Informatics and Natural Intelligence, 2019, 13(2):1-17.
[11] 淡宁,袁宇浩,冯进,等.基于双滑模结构的PMSM容错控制新方法[J].计算机仿真,2019,36(9):288-294.
[12] Dogruer T , Can M S . Design and robustness analysis of fuzzy PID controller for automatic voltage regulator system using genetic algorithm:[J]. Transactions of the Institute of Measurement and Control, 2022, 44(9):1862-1873.
[13] 丁威,杜钦君,宋传明,等.均值耦合多电机滑模速度同步控制[J].西安交通大学学报,2022,56(2):159-170.
[14] Taja B , Mwm A , Zha C , et al. Jaya optimization algorithm for transient response and stability enhancement of a fractional-order PID based automatic voltage regulator system - ScienceDirect[J]. Alexandria Engineering Journal, 2020, 59( 4):2429-2440.
[15] 林祖荣,杨晓丰,倪宏宇,等.基于自适应指令滤波反推的多电机同步控制[J].控制工程,2021,28(5):905-910.
[16] 穆海芳,郭凯,胡波. 基于遗传算法和模糊神经网络的康复机器人上肢阻抗控制[J]. 廊坊师范学院学报(自然科学版),2021,21(4):56-59+64.
[17] 胡徐胜,郑睿,陶彬彬. 四旋翼无人机飞控系统设计与实现[J]. 廊坊师范学院学报(自然科学版),2021,21(4):46-50.
[收稿日期] 2022-12-15
[作者简介] 王伟(1985- ),男,硕士,安庆职业技术学院副教授,研究方向:服装技术、服装设备及舒适性。
