燃油调节器计量活门自抗扰控制
2023-07-07姚凯学张庆铭
陈 波 ,姚凯学 ,张庆铭 ,王 洋
(1.贵州大学计算机科学与技术学院,贵阳 550025;2.贵州民族大学数据科学与信息工程学院,贵阳 550025;3.中国航发贵州红林航空动力控制科技有限公司,贵阳 550009)
0 引言
随着现代作战环境的日益复杂,对军用航空发动机的燃油控制精度要求越来越高。而燃油控制精度与计量活门位置密切相关,计量活门作为燃油系统中燃油流量计量的重要部件,对其位置的精确控制至关重要。某型燃油调节器由电子控制器、伺服阀、计量活门和压差活门组成,由于燃油流场的复杂性、计量活门元件老化和工作环境等因素导致计量活门位置控制性能降低。研究此液压控制系统燃油流量的精确性在工程应用上具有重要意义。
液压控制系统是非线性控制系统,众多学者分别从液压位置控制的精确性、鲁棒性和自适应性进行了研究。李建雄等[1]针对不可测状态和未知外负载力的冷带轧机液压伺服位置系统,提出一种基于未知输入观测器的鲁棒输出反馈控制方法;Yang 等[2]针对双杆液压伺服系统的高精度运动跟踪控制,提出了一种基于辅助误差信号的鲁棒控制方法和一种自适应控制策略,所设计的控制器不需要总扰动边界的先验知识,鲁棒控制律的增益可以自行调整;Wang 等[3]提出了一种基于扩展状态观测器的液压阀控单杆执行机构运动跟踪控制的非线性自适应控制方案,是一种估计和补偿失配扰动的方法,能有效补偿动力学的不确定性,对参数有自适应机制,进一步提高了跟踪性能;Yang 等[4]针对液压伺服系统存在大量未知匹配和不匹配建模不确定性的情况,提出了一种非线性自适应输出反馈鲁棒控制器。对液压位置控制的研究成果斐然,但这些控制方法对系统模型精确程度依赖性较强,算法较复杂,故在工业领域较难应用。计量活门在航空发动机中具有重要作用,对计量活门的特性以及位置控制研究具有工程意义。相关文献对计量活门建立数学模型,分析动态特性与稳态精度[5]、使用AMESim 建模与仿真[6]以及采用Matlab/Simulink 进行仿真分析[7]。这些研究为计量活门位置控制器设计奠定了基础。
本文依据燃油调节器的液压控制系统工作原理,建立动力学模型,分析燃油油压扰动[9]等因素对计量活门位置控制受扰动的影响。
1 某型燃油调节器工作原理
某型燃油调节器的液压控制系统工作原理如图1所示。此系统为某型航空发动机2区加力燃油控制系统,主要由电子控制器、伺服阀、计量活门、指令活门和压差活门组成。为了保障飞机飞行的正常运行,当需要提供飞行所需的燃油时,液压控制系统开始工作。当需要2 区供油时,其他控制系统计算出所需的燃油量,通过计量活门的活门特性能计算出计量活门参考位置输入,电子控制器利用计量活门位置反馈信号进行处理,发出控制电液伺服阀的控制信号,使电液伺服阀发出所需的控制油,通过控制油把计量活门位置精确控制到参考位置。

图1 某型燃油调节器的液压控制系统工作原理
计量活门主要起到计量燃油的作用。燃油在计量前称为计前油,在通过计量活门后称为计后油。计量活门主要由弹簧、滑阀、计量腔室和控制腔室组成。当需要提供燃油时,由控制伺服阀提供控制油,控制油通过控制管道进入计量控制腔,从而控制计量活门的滑阀的移动以达到控制燃油流量的作用。
2 数学模型
根据计量活门控制原理,结合计量活门阀芯运动规律和伺服控制原理,建立系统动态数学模型,研究系统的动态特性。
对于计量活门,燃油流量为
式中:Cd为流量系数;W为滑阀阀芯面积梯度;y为计量活门位置;Pi为计前油压;Pext为计后油压;ρ为航空燃油密度。
在此型计量活门燃油计量中,压差活门保证计前油压与计后油压之差保持在1 MPa。由式(1)可知,在燃油压差均值为零的情况下,燃油流量Q与计量活门位置y成正比。因此,提高计量活门位置控制精度就能提高燃油计量精度。
虽然压差活门保证了计前和计后燃油的压力恒定,但不能保证计量燃油在滑阀阀芯处恒压,阀芯处的压力在实际系统中无法测得。计量腔的燃油来自油箱通过燃油增压泵进行增压,增压之后的燃油通过燃油通道到达计量活门计量腔会有压力损失,且高压燃油流动容易有压力波动。压力波动很大程度上影响了计量活门计量的精确度,同时影响了计量活门响应的快速性。
计量活门滑阀阀芯受到计后油与控制油的压差压力和弹簧力。当计量活门运动时,计量活门还应受到阻尼力作用。由计量活门动态力平衡得
式中:m为计量活门滑阀阀芯质量;ẏ为计量活门移动速度;s为滑阀阀芯面积;k为弹簧系数;η为黏性摩擦系数。
依据电液伺服阀工作原理和流量连续性,可得
式中:Qc为进入控制腔的流量;τ为计量活门泄漏系数;V为控制腔体积;E为燃油弹性体积模量;fe为计量燃油扰动。
作为高速电液伺服阀,控制输入与阀芯位置近似成正比,比例增益为kv,即xv=kvu。因此
式中:Ps为电液伺服阀进口压力;将sgn(u)定义为
式中:u为控制电压输入。
3 计量活门的自抗扰控制器设计
3.1 状态空间模型
计量活门在使用过程中,滑阀阀芯移动受到磨损,计量活门工作的环境复杂,这些可能导致η,E,m,kv,τ,k等参数变化。参数的较大变化将影响系统的控制精度,甚至会导致系统不稳定。再者,计量燃油压力波动、计量活门泄漏等将导致系统控制性能降低。因此,所考虑的计量活门液压系统应考虑式(6)中参数的不确定性,并在后续控制器设计中进行处理,以确保整个闭环稳定性。
3.2 计量活门的自抗扰控制器设计
为了使计量活门位置能快速稳定跟踪计量活门位置参考输入,且在计量燃油压力扰动和系统参数不确定的情况下抗扰,将设计自抗扰控制器应用到此系统中。考虑模型参数不确定性和计量燃油扰动,使计量活门阀芯轨迹尽可能的跟踪任意光滑的期望轨迹,为了方便设计简单易实现的自抗扰控制器,将式(6)中第2式对时间求导,记,可得
考虑d导数有界,令扩张状态x4=d,ḋ=h,设计线性扩张状态观测器(Linear Extended State Observer,LESO)观测系统各状态以及总扰动项。考虑观测误差为
所设计的LESO为
采用带宽配置方法[20]将观测器式(9)的带宽配置到-ωo,得观测系数为
设计自抗扰控制器为
式中:r为参考位置输入。
采用带宽配置方法[20]将自抗扰控制器式(10)的带宽配置到-ωc,得到所设计的自抗扰控制如图2 所示。所设计的自抗扰控制器仅需要计量活门位置传感器数据和控制器输入数据,在物理上可实现。

图2 自抗扰控制
4 仿真验证
4.1 仿真平台
为了验证所设计控制器的有效性,同时研究液压执行机构高性能跟踪控制的基本问题,搭建仿真平台。使用Matlab/Simulink 仿真工具对某型燃油调节器计量活门的液压控制系统搭建仿真模型,调节计量活门状态观测带宽和控制带宽进行系统仿真,计量活门液压系统物理参数见表1。
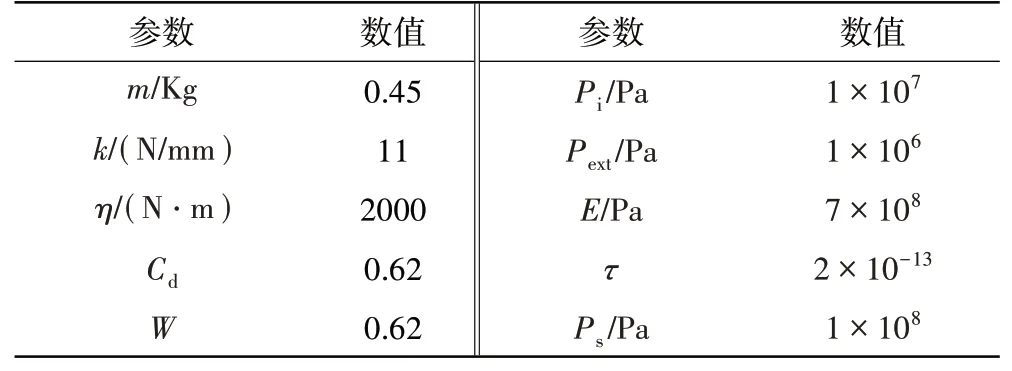
表1 计量活门液压系统物理参数
4.2 仿真比较
为了研究所提出控制器的有效性和实用性,将所设计的自抗扰控制器与PI 控制进行比较。本文所使用的自抗扰控制器,将由燃油扰动等引起的模型不确定和非线性扰动项集成为总扰动,并使用扩张状态观测器观测总扰动状态。通过仿真调节控制器参数,观测带宽和控制带宽分别取ωo= 2500,ωc= 1000。
目前在某型燃油调节器计量活门的控制中使用PI 控制,使用PI 控制器对所建立的模型进行调节,通过多次调节,选取相对较优的比例参数和积分参数分别为P=500,I=1200。
为了定量地评估上述2 种控制器的性能,采用最大跟踪绝对误差值、跟踪误差平方的均值和均方差指标进行评价。
最大跟踪绝对误差值表示为
式中:e(i)=r(i)-x1(i),为每一步的跟踪误差;N为仿真总步数。
跟踪误差平方的均值为
绝对误差值的平均为
均方差为
在实际工程中,一般参考输入为光滑曲线,避免计量活门发生突然激烈抖动。给定5 mm平滑的参考输入,在第4 s 处加入计量燃油fe= 2000 Pa 的正阶跃扰动,抗计量燃油正阶跃扰动跟踪和扰动跟踪误差如图3、4 所示,抗阶跃扰动仿真性能指标见表2。从图3、4 中可见,在平滑阶段和有阶跃扰动时,计量燃油扰动自适应控制明显好于PI控制。PI控制的最大绝对误差和均方差分别为8.20315×10-3和5.12835×10-5。计量燃油扰动自适应控制的最大绝对误差和均方差分别为3.76459×10-4和1.78593×10-6。同时,燃油负扰动也影响着计量活门的位置控制。在第4 s处加入计量燃油fe= -2000 Pa的负扰动进行仿真,抗计量燃油负阶跃扰动跟踪如图5所示。对计量活门2个方向的燃油阶跃扰进行仿真分析,表明所设计的控制器抗扰动效果比PI的好。

表2 抗阶跃扰动仿真性能指标

图3 抗计量燃油正阶跃扰动跟踪

图4 抗计量燃油正阶跃扰动跟踪误差

图5 抗计量燃油负阶跃扰动跟踪
在燃油负阶跃扰动下,抗计量燃油扰动控制输入如图6所示。从图中可见,观察出自抗扰控制比PI控制需要稍大的电流输入。

图6 抗计量燃油扰动控制输入
为了更能体现所设计的控制器能达到抗燃油扰动同时提高控制精度,在计量活门10 mm的行程内跟踪正弦函数0.005sin(2πt+ π/2)+ 0.005,加入正弦波动的计量燃油fe= 2000sin(4π)Pa。抗正弦扰动位置跟踪与跟踪误差分别如图7、8 所示,跟踪性能见表3。

表3 抗正弦扰动仿真性能指标

图7 抗正弦扰动位置跟踪
从图8 中所见,在正弦计量燃油的扰动情况下,计量燃油扰动自适应控制器控制误差明显好于PI 控制,提高了计量活门控制精度。从表3 中可见,自抗扰控制和PI 控制的最大绝对误差分别为2.62611×10-3和9.03823×10-3,均方差分别是5.71403×10-4,7.77306×10-3。

图8 抗正弦扰动跟踪误差
自抗扰控制器对x1、x2、x4的观测如图9、10 所示。对于计量燃油波动等引起的集总扰动x4,使用线性扩张状态观测器能很好的观测出来并给予补偿,因此所使用的控制器具有很强的抗扰性。

图9 状态x1的观测及观测误差

图10 状态x2,x4的观测
5 结论
(1)在相同计量燃油扰动情况下,使用最大绝对误差、误差平方的均值和均方差作为性能指标。
(2)将自抗扰控制器与工程应用的PI 控制器进行比较可知,通过前者仿真得出的抗燃油干扰能力明显优于后者的,具有很强的鲁棒性,提高了计量活门位置控制精度。
