基于基排序的推力矢量飞机控制分配方法
2023-07-07倪烨斌姚太克
倪烨斌,姚太克,杨 刚
(中国航发控制系统研究所,江苏无锡 214063)
0 引言
随着航空技术的快速进步,航空动力装置从为战机提供足够的飞行推力,发展到基于矢量装置直接产生3 轴力矩参与飞行姿态控制的使用场景。推力矢量在环的运用使得战机操纵性能获得极大提升,大幅扩展了低速、大攻角的左飞行包线[1]。然而,相较于传统飞机,推力矢量战机存在更为显著的操纵面冗余、执行机构物理特性差异大等特征,是典型的过驱动系统[2];充分挖掘装备潜能,协调好传统气动操纵面与新型推力矢量装置的控制问题日益突出。
针对输入量维数大于控制状态维数的过驱动对象,Durham[3-4]在20 世纪90 年代提出了控制分配(Control Allocation)理论,通过对控制量和被控对象间存在的映射关系进行变换,推导出解决控制量耦合冗余的数学原理。史静平等[5]通过将操纵面的控制律、分配律从飞行控制器中独立区分开来,研究了控制分配理论在多操纵面飞机上的应用,并对伪逆、加权伪逆、面搜索、数学规划等具体控制分配技术的应用进行了梳理;杨恩泉等[6]研究了非线性多目标下的控制分配问题;邓婷婷等[7]基于动态逆理论探究了基于虚拟控制指令、广义操纵效能矩阵求解控制输入量的方法。在控制分配技术向新构型飞机推广应用上,屈晓波等[8]针对无尾飞翼布局飞机的多操纵面控制分配及航向控制问题进行了研究、设计及试飞实践;洪剑锋[9]、李继广等[10]针对推力矢量飞机面临的矢量操纵面进入飞行姿态环、非线性全包线控制律设计、低速大攻角控制等问题开展仿真研究。上述研究成果多集中在具体的控制分配算法上,并没有充分区分如气动操纵面与矢量操纵面这类执行机构的具体使用限制条件。
本文提出了一种基于基排序分配管理算法,通过求解转矩可达集[4](Attainable Moment Subset,AMS)划分主控气动操纵面与辅助气动操纵面;按照推力矢量工作时间最小原则,确定按操纵力矩需求差进行的多级联(串接链Daisy Chain)[11]分配结构,补全了操纵面受限、差异化场景下的控制分配技术。
1 矢量飞机的控制分配与管理结构
推力矢量的介入使得战机具备优良的过失速机动能力,能够在包线内轻松完成一系列具有战术价值的超机动动作[12],典型过失速机动及战术价值如图1所示。
图1 典型过失速机动及战术价值
推力矢量飞机蕴藏了出色的飞行任务执行效能,是典型的新型多操纵面布局被控对象;为充分发挥控制潜能,通常将这类多操纵面飞机的飞行控制系统控制算法划分为飞行控制规律与控制分配律2部分[5],典型多操纵面飞机控制律与控制分配结构如图2所示。
图2 典型多操纵面飞机控制律与控制分配结构
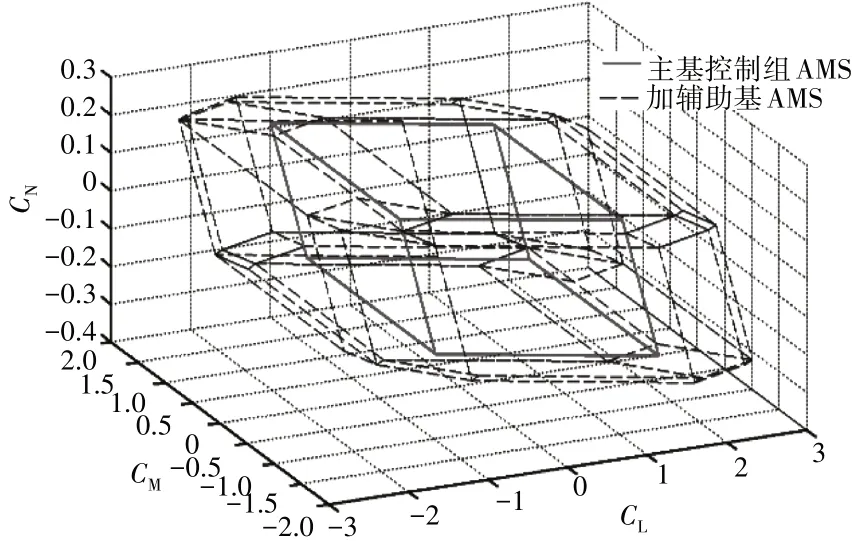
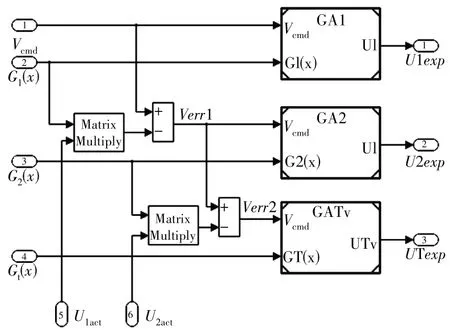
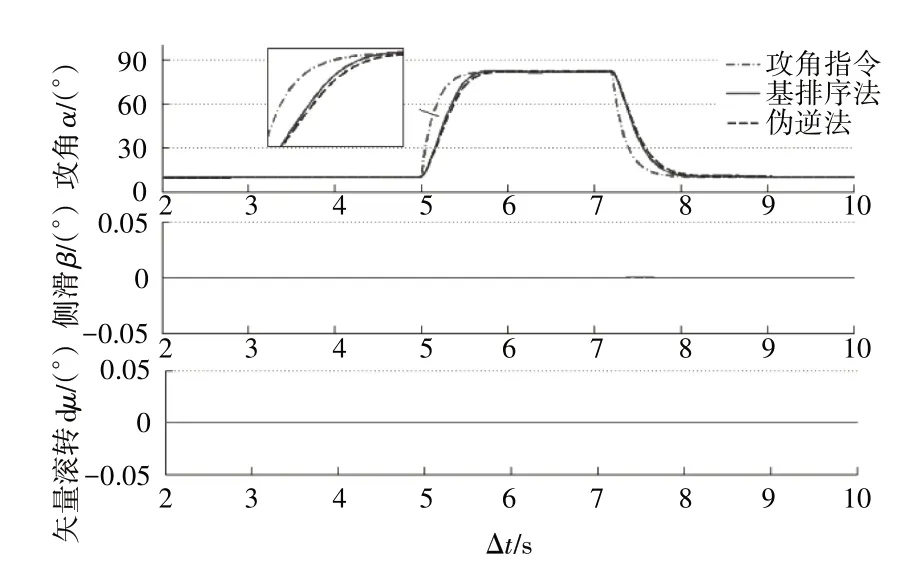
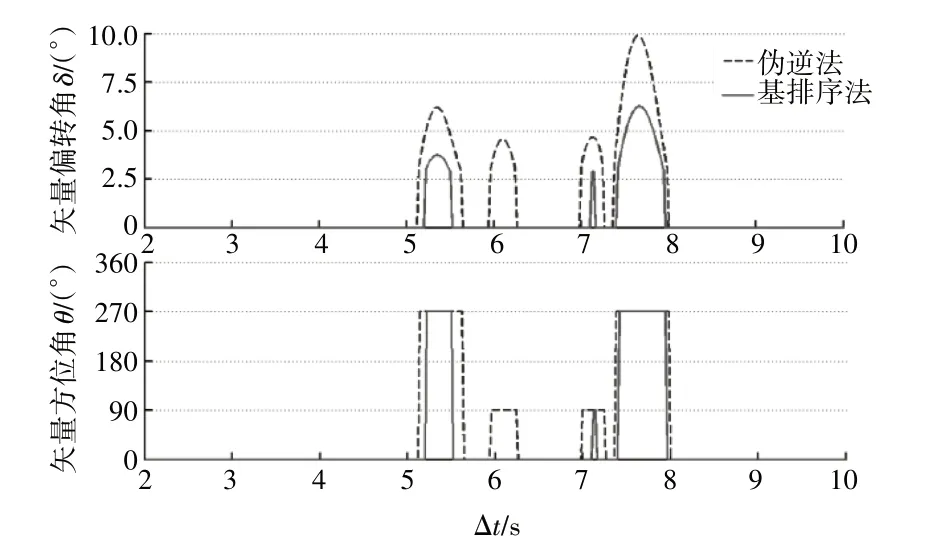
区别于常规布局飞机控制器,多操纵面飞机飞行控制律解算出虚拟指令v∈Rn(通常为3 轴转矩,n= 3),再按照指定分配目标由分配律解算出操纵面分配结果u∈Rm(m为操纵面数目且n 式中:G(x)∈Rn×m为受状态量x影响的控制效能矩阵;argminJ(u)为分配优化目标。 典型的控制分配优化目标见表1。分配优化目标可表述为多操纵面分配管理的数学抽象,通常通过目标函数来表征最小阻力、最大升力、最小控制能量、最小雷达反射面积等具体优化目标[13]。 客观来说,经典分配算法中数学规划类[13]方法最适于解决范式目标下的控制分配问题,然而无论是线性规划还是2 次规划(对应p= 1 或p= 2)都没有平衡好算法实时性与分配规划解优化的问题。相较于实时性良好的伪逆类分配算法,规划类算法同样存在物理含义弱化,无法解决受限操纵面差异化管理,缺乏有效约束推力矢量这类异构操纵面的使用途径。 本文采用一种基于基排序分配的控制分配方法,通过气动与推力矢量操纵面区分分组,依照转矩可达集(AMS)大小将气动操纵面分离为主基控制组与辅助基控制组,当主基控制组不能满足实际转矩需求时,依次投入辅助基控制组、矢量基控制组,该方法具有物理含义明晰,计算实时性高的特点,便于结合工程经验实现控制分配管理。 对于式(1)中描述的G(x):Rm→Rn分配映射关系式,引入基控制组与基控制效能矩阵[3,5]的概念 式中:gi(x) 为操纵面ui对应的控制效能向量;U1,…,Up为将操纵面分成了p组基控制组;G1(x),…,Gp(x)为对应p组基控制效能矩阵,每个基控制组内的控制效能向量线性无关。 基控制组的划分,实际是将冗余操纵面进行了分组组合,全局分配过程化为每个基控制组的分配过程。通过合理配置操纵面的组合形式,分配算法能够在兼顾操纵面物理差异的条件下有效适应不同的飞行条件与飞行任务。 具备推力矢量装置的多操纵面飞机,其任意3 个操纵面若满足对应的3×3 控制效能子矩阵满秩,则这组操纵面即可作为基控制组,每个基控制组能单独为飞机提供3轴方向上的操纵力矩。 多操纵面布局的战机基控制组选取并不唯一,对照现有西方先进战机F-22 的12 个操纵面在常规飞行阶段优先采用水平升降舵、外侧襟副翼、V 尾方向舵[14],随机动程度增加依次补充其余操纵面。显然前3 个操纵面接近传统的主操纵面,这种分组配置的形式是考虑到水平升降舵、外侧襟副翼、V 尾方向舵在常规飞行状态下可提供的3轴力矩效能最高。 衡量1 组操纵面操纵控制效能大小可借助转矩可达集(AMS)的方式,对于飞行器而言AMS 抽象为3维空间上的“超盒体”,表征了该控制组在3 轴力矩通道上的可控范围。基控制组对应的AMS 体积越大,表明该基控制组可提供的操纵力矩效能越大。优先选用AMS 大的基控制组可以有效减少其余基控制组的频繁调度,从而优化控制指令跟随下的控制能量消耗总量。 综上,按照AMS调度的基排序分配算法表述如下。 (1)对操纵面按照AMS可达集大小有序划分p组的基控制组; (2)计算首个基控制组的分配结果 (3)设置退出基排序分配的虚拟控制指令差阈值ε(ε接近0),从第2组基控制组(k= 2…p)开始判断 按上式成立与否,进行步骤(4)或(5); (4)若(3)中判断条件不成立,则表明前序的k-1 组基控制组尚不能满足控制指令要求,应采用级联(串接链)分配方式计算第k组基控制组的分配结果 令k=k+ 1,重复步骤(3); (5)若满足(3)中判断条件,则表明后续的pk+1基控制组应退出分配过程,即令Uk=0,…,Up=0,基排序分配过程结束。 其中,sat(⋅)表示基控制组的受限情况,它包含了该基控制组内操纵面的物理位置、带宽限制以及故障损伤限制情况。 特别的,针对于推力矢量这类异构操纵面,其控制带宽较常规气动操纵面低,且使用寿命受限,宜将其定义为优先级最低的基控制组;在基排序算法中,仅当所有气动基控制组均投入尚不能满足力矩需求时,再投入矢量基控制组,由此来最大程度地减少推力矢量投入时间。 作为典型的多操纵面布局飞机,推力矢量飞机布置了冗余控制面,具有操纵面故障容错的潜能。通过剔除控制面、修正力矩效能向量、重排基控制组等措施,基排序分配算法具备对常见的损伤、松浮、卡死3类操纵面异常的故障适应能力。 假设原第k组基控制组的uj操纵面故障,则按照该操纵面的故障类型,设计基排序分配方案的故障处理对策为: (1)操纵面“损伤”故障对策。操纵面uj损伤后,应依据受损系数εj(0<εj<1)修正效能向量为εj⋅gj(x);对m维操纵面重新按AMS 可达集大小划分基控制组。 (2)操纵面“松浮”故障对策。操纵面uj松浮后成为随动舵面,几乎不产生操纵力矩,修正力矩效能向量gj(x)= 0;则剔除该控制面,并对其余m- 1 维操纵面重新按AMS可达集大小划分基控制组。 (3)操纵面“卡死”故障对策。操纵面uj卡死在位置则固定该控制面输出为修正虚拟指令为vf=对其余m- 1 维操纵面重新按AMS 可达集大小划分基控制组。 结合第2.2、2.3 节,操纵面故障及处理对策将直接影响影响原基控制组的划分,需按照具体故障类型完成基控制组重排,这一部分功能纳入故障综合处理,并作为开展基排序分配的前序功能。 综合下来,基于基排序综合分配流程如图3所示。 图3 基于基排序的综合分配算法流程 某型推力矢量战机包含7个气动操纵面与1个轴对称矢量喷管,某型推力矢量战机及其操纵面布局如图4所示。 气动操纵面包含升降舵δe、差动副翼δa、方向舵δr、左右前襟δlefl与δlefr、左右升降副翼δbefl与δbefr,上述7个气动操纵面偏转范围见表2;轴对称矢量喷管的偏转由矢量方位角δTV、矢量偏转角θTV确定,为了同气动操纵面偏转极性相一致,可按极坐标变换将δTV、θTV投影至机体Y 轴、Z 轴,等效为δTy、δTz2 个异构操纵面。 表2 气动操纵面偏转范围 基于推力矢量飞机气动力数据建立非线性6 自由度模型,基于部件级特性建立发动机模型,构建气动、矢量操纵面伺服机构模型及进气道模型,综合构建飞/发一体化模型,完成配平及线性化处理。 结合全包线非线性动态逆控制律[15-16]设计方法,控制分配输入指令为3 轴虚拟力矩系数vcmd∈R3;在典型定常平飞状态(1000 m,Ma=0.3,迎角α= 10.03∘)下,提取战机控制效能矩阵G(x)∈R3×9 子项GAero(x)表征了气动操纵面部分的力矩效能矩阵,由其列向量(控制效能向量)组成的任意3×3维子矩阵若满足满秩条件,则列向量对应的控制量即可构成1 组基控制组。在组组合情况中,除“升降舵δe+左前襟δlefl+右前襟δlefr”、“升降舵δe+左升降副翼δbefl+右升降副翼δbefr”2种组合的控制效能子矩阵不满足满秩条件,其余均可够成基控制组;遍历33 个基控制组AMS,可以得到AMS体积最大的3组基控制组组合形式,AMS最大的3个基控制组合形式见表3。 表3 AMS最大的3个基控制组合形式 进一步对比3 组基控制组AMS 在滚转CL、俯仰CM、偏航CN通道上的组成,前3 组基控制组AMS 构成见表4。 表4 前3组基控制组AMS构成 从表中可见,AMS 排序第2的基控制组配置形式为“升降舵δe+左升降副翼δbefl+方向舵δr”,相较与第1种方式,该基控制组能获取更大的俯仰操纵能力,然而其有限的滚转操纵能力限制了该组基的可用性;显然AMS 体积最大的组合形式“δe+δa+δr”在3 通道的可操纵性最为均衡。因此,我们选择升降舵δe、差动副翼δa、方向舵δr作为主基控制组U1,在分配算法中优先使用,这种选择形式完全符合工程经验。 对剩余4 个气动操纵面,从减少级联分配级数,提高实时性的角度出发,没有必要再划分为更多基控制组,可统一定义为辅助基控制组U2。 当主基控制组不能够满足飞行任务的操纵力矩需求时,启用辅助基控制组,否则令U2= 0;投入辅助基控制组前后AMS对比如图5所示。 图5 投入辅助基控制组前后AMS对比 从约束推力矢量使用时间的角度出发,当且仅当气动操纵面可提供的操纵力矩不再满足飞行任务要求时,才启用矢量基控制组。 由此某型推力矢量战机的基控制组划分为 基排序分配算法按需依次调用U1、U2、UT。 综合基排序分配算法流程,在Simulink 中构建3级串接链分配律模型,基于基排序的3 级串接链分配算法结构如图6所示。 图6 基于基排序的3级串接链分配算法结构 其中,G1(x)、G2(x)、GT(x)为3 组基控制组U1、U2、UT对应的力矩效能矩阵,U1exp、U2exp、UTexp为求解的期望偏转输出,U1act、U2act为经气动操纵面执行机构模型及操纵面故障综合后的实际偏转量;考虑G2(x)∈R3×4、GT(x)∈R3×2非方阵而分配算法应具有良好的实时性,这里采用Moore-Penrose 逆[3]作为每个基控制组分配求取结果,Moore-Penrose 方法求解形式为 式中:Ui、Gi、vi分别为对照的基控制组、力矩效能矩阵和虚拟指令。 (1)优先采用主基控制组U1,代入式(8)求解分配结果为 限制后主基控制组实际输出为 (2)此时主基控制组U1尚不能满足虚拟指令,偏差为 继而投入辅助基控制组U2,求解分配结果为 (3)U2act满足sat(U2exp)=U2exp,表明启用辅助基控制组即满足了虚拟指令需求,不再投入矢量基控制组(UT= 0),基排序分配过程结束。 假设一种操纵面故障的情况,左前襟δlefl出现松浮故障,则修正则回溯到上述第(2)步修正G2(x),重新求解U2分配结果为 限制后辅助基控制组实际输出为 此时投入主、辅助基控制组尚不能满足虚拟指令,偏差为 继续投入矢量基控制组,求解分配结果为 转换为矢量偏转角δTV和矢量方位角θTV为 可见,推力矢量在气动操纵面故障的情况下,可以按需介入分配解算,补充气动控制效能的不足,推力矢量在环能够提升姿态控制回路的操纵面容错能力,而基排序分配方法能将这种潜在效能充分发挥。 针对于超机动动作的分配控制性能,以下分别采用伪逆分配法、基排序分配方法完成“眼镜蛇”机动(Cobra Maneuver[17]动作),2 种分配方法的Cobra Ma⁃neuver对比如图7所示。 图7 2种分配方法的Cobra Maneuver对比 从图中可见,基排序分配方法相较于全程不限制推力矢量使用的伪逆分配法,飞机纵向通道攻角指令跟随品质仍较为优良,全程横侧向通道均未出现侧滑、滚转等不利影响;另外,基排序分配方法通过有序配置操纵面的分配管理形式,最大程度地优化了推力矢量开启时间,Cobra Maneuver 下2 类分配方法矢量偏转情况如图8所示。 图8 Cobra Maneuver下2类分配方法矢量偏转情况 进一步的仿真表明,通过优化基控制组划分、配置合理虚拟控制指令差阈值,在常规飞行任务阶段,基排序分配方法能够在保证飞行品质不降级的前提下,有效减小辅助操纵面、异构操纵面的调用频率。而对完成期望操纵力矩幅值变化大、过渡频率高的超机动动作,基排序分配方法表现出同全时段启用矢量装置分配方法一致的操控特性,显然该方法可作为适用于各飞行阶段、各任务场景的通用控制分配方案。 (1)该算法通过将气动操纵面按AMS 大小划分主、辅基,矢量操纵面作气动效能不足阶段补充基的操纵面管理方案,通过设置合理的3 个优先等级,使得分配流程清晰,可有效解决矢量操纵面融入飞机姿态控制环时存在的特性异构、使用时间受限等问题。 (2)数字仿真分析表明,该算法能够在保证控制品质不退化的前提下,避免推力矢量的频繁调度。相较于经典伪逆法,该方法在典型的超机动动作数字仿真中将矢量调度时间削减为前者的51%,最大矢量偏转角由9.8°减小到6.1°。气动操纵面松浮故障综合过程,检验了该算法将矢量控制装置作为控制效能补充基后,具备对气动操纵面容错适应能力。 (3)对于各层级基排序分配过程,该算法可采用Moore-Penrose 方法进行求解,保证了实时性。在发动机推力估计、直接推力技术、发动机及飞机机载技术[18-19]日趋成熟的背景下,该算法将在矢量在环的飞/推一体化控制领域体现出更高的工程实践价值。2 基于基排序的控制分配算法
2.1 基控制组的定义
2.2 基于基排序的控制分配算法
2.3 基于基排序分配的操纵面故障对策
2.4 基于基排序的综合分配方案

3 仿真验证
3.1 基控制组选取

3.2 基排序分配算法算例及仿真
4 结论
