基于振荡流的气固两相流流动特性分析
2023-07-05王涌锂董林
王涌锂,董林
(上海工程技术大学机械与汽车工程学院,上海201600)
稀相气力输送是一种以空气为介质在管道中输送粉状、颗粒状物料的方法,是化工、材料、能源等工业运输中重要的一部分,这些使得气力输送系统能广泛地应用于工业工艺中.然而,因为重力的作用,输送的颗粒容易在管道底部或弯管处沉积,当空气速度较低时容易产生堵塞,造成的压降过大,因此稀相气力输送通常需要使用高速气体,但是空气运输速度过高会加剧颗粒与颗粒之间,颗粒与管道之间的冲击,造成颗粒的降解以及管道的腐蚀与磨损,这些限制了稀相气力输送系统的应用.为了有效地防止管道侵蚀和颗粒沉积,实现低能耗输送,需要降低输送速度,将压降和输送速度控制到尽可能低的值作为气力输送系统设计的重要准则之一.
近些年来,研究者针对气力输送系统进行了多项研究.Klinzing[1]通过对气力输送背景的调查,提出了该领域需要解决的问题.Li 等[2]提出了一种旋流气力输送(swirling flow pneumatic conveying,SFPC)系统,并对水平管道中的SFPC 系统进行了总压降、固体流型、功率消耗和附加压降的试验研究.发现在较低的气速范围内,SFPC 的压降、功耗和附加压降均低于轴流气力输送.Dong 等[3]采用旋转式旋流器和非旋转式旋流器进行对比,发现旋转式旋流器节能效果更好.Zhou 等[4]为三种类型的旋流发生器开发基于计算流体动力学- 离散元耦合的气体和颗粒流动模型,进行网格和时间尺寸相关性测试以验证数值模型,研究结果发现三叶旋流发生器产生旋流数大,但衰减速度快,内螺旋结构旋流发生器最有利于大颗粒运输.朱雷[5]和雒春升[6]为了更有效地降低运输速度和功率系数,采用了一种新型的振荡流发生器,并用数值模型进一步解释了振荡流的节能机理.Sharma 等[7]利用数值分析和可变流化堆积密度引入了一个新的颗粒速度模型,该模型表明滑移速度随着空气质量流量和无量纲长度的增加而减小.
直管是气力输送系统中最常见的,最必不可少的装置,当颗粒从供料处进入管道时,颗粒在被气体加速前速度低,颗粒沉积到管道底部,出现堆积,造成压降,因此对直管加速区域的研究十分重要.在很多节能气力输送技术中,在颗粒入口前激发气体振荡流是最有效和简单的方法.晏飞[8]应用了沙丘模型,该模型安装在样品颗粒进料附近水平管的底部,发现成功降低了功耗和输送速度.为了降低功耗和气体速度,Yan 等[9-10]使用均匀长度的软翅片,这些翅片固定在进气口附近的水平气动输送管的水平或垂直中心平面上.试验结果表明,在低风速范围内,使用软翅片可以降低功耗,降低压降以及最小输送速度.Dong 等[11]在Yan 的基础上创新地改进为非均匀软翅, 结果表明带有非均匀翅片的流动中造成的颗粒波动速度的强度比带有均匀翅片和不带翅片的流动中产生的轴向和垂直颗粒波动强度高, 这些尤其是体现在管道顶部附近.Dong 等[12]通过在入口前布置不同宽度的格栅,用以产生振荡流以加速悬浮粒子,试验结果也验证了格栅的有效性.
气体通过方形柱体时可能会产生具有高波动速度的强烈振荡尾流,出现卡门涡脱落,这种振荡尾迹流可以用来加速或悬浮加速区的颗粒,也给本研究提供了新的思路.将方形柱体和软翅片组合使用,将方形柱体与软翅片连接,气流先通过方形柱体产生振荡的尾迹流,这种尾迹流进一步激发软翅片的振动,提高软翅的摆动效率.
本文旨在研究和比较软翅和方形柱体支撑器组合模型产生的振荡流对压降、输送速度、功率消耗的影响.此外,采用粒子图像测速技术(Particle Image Velocimetry,PIV)分析管道中模型对空气流场和颗粒流场的影响,阐明模型的节能机理.
1 试验装置及程序
1.1 试验设置
图1 是本研究中使用的试验装置的示意图,在本试验研究中,由于重点研究粒子的加速区域,因此,本试验的试验装置的输送距离比实际的气力输送装置短,但这个距离足以验证节能装置的效果,这套试验装置也可视为实际气动输送系统的一部分.
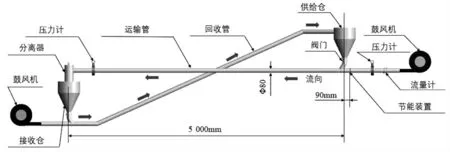
图1 试验装置示意图Fig.1 Schematic of the experimental facility
本文采用稀相正压气力输送系统的试验装置,如图1 所示,气流由鼓风机通过流量计吹入管道,打开阀门,固体颗粒在重力的作用下从供给仓进入水平管道,装置位置在颗粒进入管道的入口前,气流经过节能装置引发涡流干扰,产生湍流扩散携带从入口进入的颗粒,之后颗粒进入光滑丙烯酸试验管道.进料入口后的水平管道长为5 000 mm.整个系统管道内径为80 mm,弯管与直管连接处精准匹配,可忽略对颗粒运行的影响.管道的出口处有分离器,管道的试验颗粒经过分离器分离进入接收仓中,接收仓下有一个鼓风机,吹动颗粒,颗粒经过回收管回到供给仓,循环使用进行试验.
运输管道中的空气流速由孔板流量计计算出来, 管壁上的静压力由图1 中两个压力计位置之间的压力传感器测量.这些数据通过A/D 转换器输入到PC,并作为数字数据进行处理.
将平均直径为2.3 mm,固体材料密度为978 kg/m3的圆柱形聚乙烯颗粒作为试验的运输材料,颗粒的图片如图2 所示.选择这些颗粒的原因是它们的密度和平均粒径与气力运输中的颗粒相对接近.试验中的气体速度的试验范围为10~16 m/s,固体质量流量Gs分别为0.10 kg/s、0.25 kg/s 和0.47 kg/s.
图2 试验固体颗粒Fig.2 Experimental solid particles
1.2 非均匀软翅和方形柱体支撑器
在气力输送中,气流是紊乱的,当气流通过软翅片时,会出现压力波动,这导致翅片振荡,翅片上下两边的压力差导致剧烈的振荡,气流在垂直方向上产生波动,被输送的粒子获得较大的悬浮力,这有利于防止颗粒的沉积和堵塞,有利于颗粒的运输.
在Dong 等[11]的研究中,采用了改进的四片非均匀软翅安装在颗粒进口前的水平面上,有效地降低了功率消耗和气体输送速度,非均匀的软翅片也减小了软翅片之间的干扰,减小了软翅磨损.为了增强软翅片的振动效应,试验中使用不同尺寸方形柱体支撑器和非均匀软翅片进行组合使用.
本试验采用的软翅片如图3 所示,每个软翅片由19 mm 宽、0.1 mm 厚的聚乙烯组成,密度为798 kg/m3.如图3 所示,位于中心位置的两片长300 mm,两边两片长度为260 mm.这种类型的软翅片在参考文献[11]中被称作Fin260,它的节能效果已得到验证.
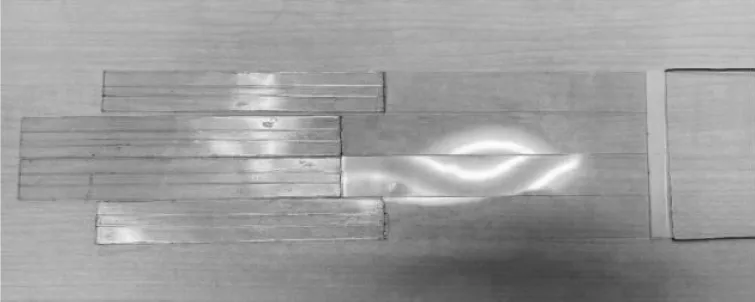
图3 软翅Fig.3 Fin
使用的聚乳酸方形柱体支撑器如图4 所示,方形柱体窄边的长度分别为5 mm、10 mm、15 mm.使用三种不同的方形柱体支撑器与Fin260 进行组合,评估不同尺寸的方形柱体支撑器和软翅的组合对气流振荡的影响.
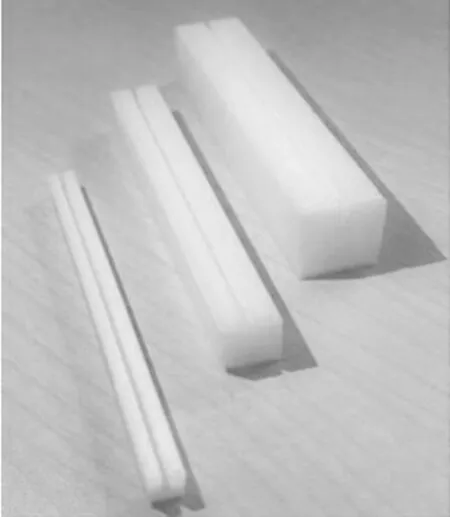
图4 方形柱体支撑器Fig.4 Models of square cylinders
非均匀长度的软翅片和方形柱体支撑器进行连接,并放置在管道中,组合装置的安装图如图5 所示.气流流经方形柱体支撑器后气流分离所产生的涡流对气流进行扰动,进一步增强软翅片的振荡效应.软翅片尾端的距离颗粒进料口0.33 m,防止颗粒进入管道后与软翅片接触.
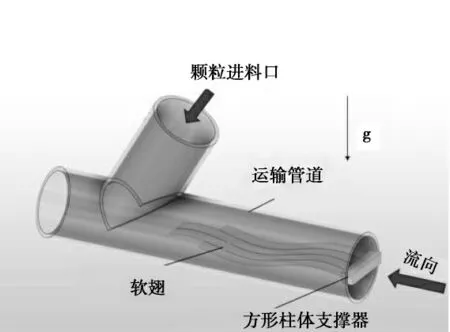
图5 软翅片和方形柱体支撑器的安装布置Fig.5 Square cylinder model and non-uniform soft fins mounted on a pipe
1.3 PIV 的测量方法
PIV(粒子图像测速)测量值是在距离粒子入口0.3 m 处获得的.采用分辨率为1 024×576 像素的高速相机,以每秒1 000 帧的帧率捕捉连续的数字粒子图像,每帧的快门速度设置为0.1 ms.利用b=2 mm 厚的激光光板照射粒子流动,颗粒的质量流速被设定为0.1 kg/s、0.25 kg/s 和0.47 kg/s,空气速度被设定为每种条件下的最小输送速度.
PIV 可对流动进行定量可视化.通过使用这种方法,可以在不干扰流场的情况下跟踪和捕获图像的粒子,并且可以获得诸如速度分布之类的二维图像信息.粒子图像测速的空间相关性被用于计算气固两相流中各组粒子的速度.如图6 所示,我们将粒子图像分成数百个询问区域.每个询问区域包含被定义为一个粒子组的几个粒子,然后利用粒子图像测速软件对图像进行分析,通过寻找两幅图像之间亮度值的相似模式来计算平均移位.这些模式的相似性是用相关函数来评估得到的粒子速度,用间隔位置分别除以时间求出垂直方向与水平方向的速度,即得到局部瞬时粒子速度.
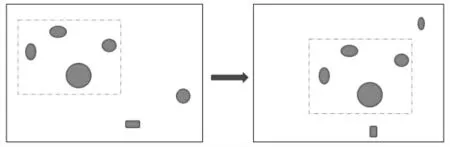
图6 PIV 测量装置Fig.6 PIV measurement setup
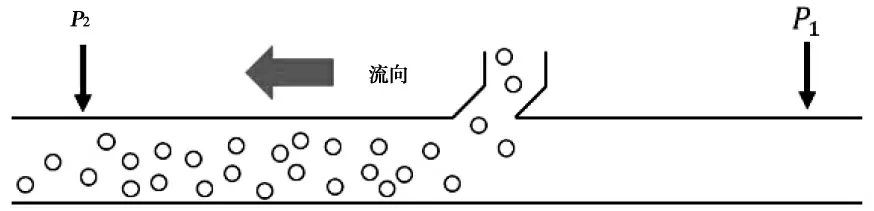
图7 测量压差的点Fig.7 Differential pressure test point
2 结果和讨论
2.1 压降与功率消耗
在本研究中,运输管道中的空气速度在10~16 m/s 之间,管道中的空气被视为不可压缩的流体,管道中的流动被假定为稳定的一维流动.管道中的压力是用一个传感器测量的,颗粒进料前的压力与管道出口处的压力之差就是压降,用压力计来测量,计算公式如公式1
P1:供应口前的静态压力Pa,
P2:管道出口处的静态压力Pa.
在本研究中,与传统的轴流式气力输送相比,由软翅片和方形柱体支撑器引起的压降被包含在气力输送系统的总压降中.因此在将软翅和方形柱体支撑器应用于气固两相流之前,有必要确定由这些装置产生的压降和气体速度的特征.图8 显示了单相流的压降与空气速度的关系.在所有条件下,随着空气速度的增加,压降也增加.可以确认的是,使用软翅片时的压降要高于正常运输的压降.
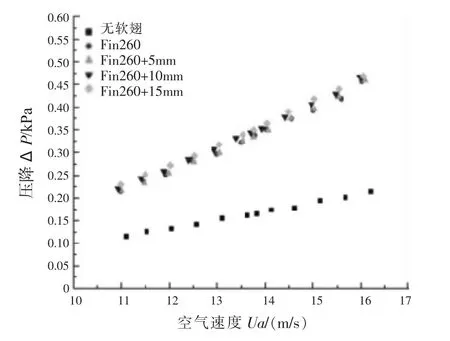
图8 单相流的压降与空气速度的关系(仅空气)Fig.8 Pressure drops of thesingle-phase flowversus the gas velocity(gas only)
在气力输送系统的研究中,将压降最小时的空气速度定义为最小输送速度,这是气力输送系统中重要的研究对象.图9、10 和11 分别显示了颗粒质量流速Gs=0.10 kg/s、0.25 kg/s 和0.47 kg/s 时,正常(无翅片)、Fin260 和Fin260+各方形柱体支撑器运输试验中的压降和空气速度变化的关系.
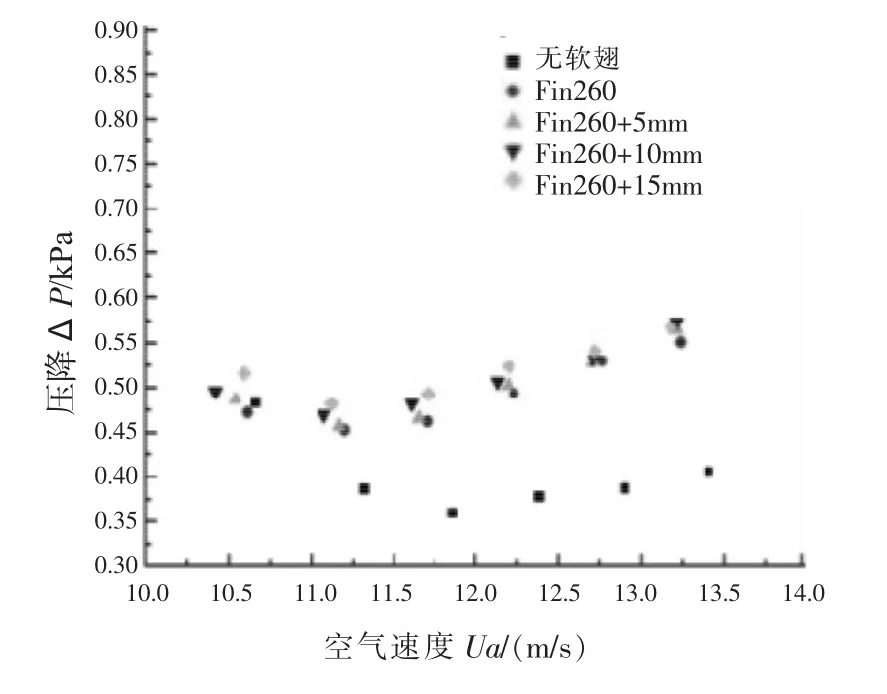
图9 各种方形柱体支撑器与软翅组合压降和空气速度之间的关系(Gs= 0.10 kg/s)Fig.9 Pressure drops of various square cylinder models with non-uniform fins versus the gas velocities(Gs=0.10 kg/s)
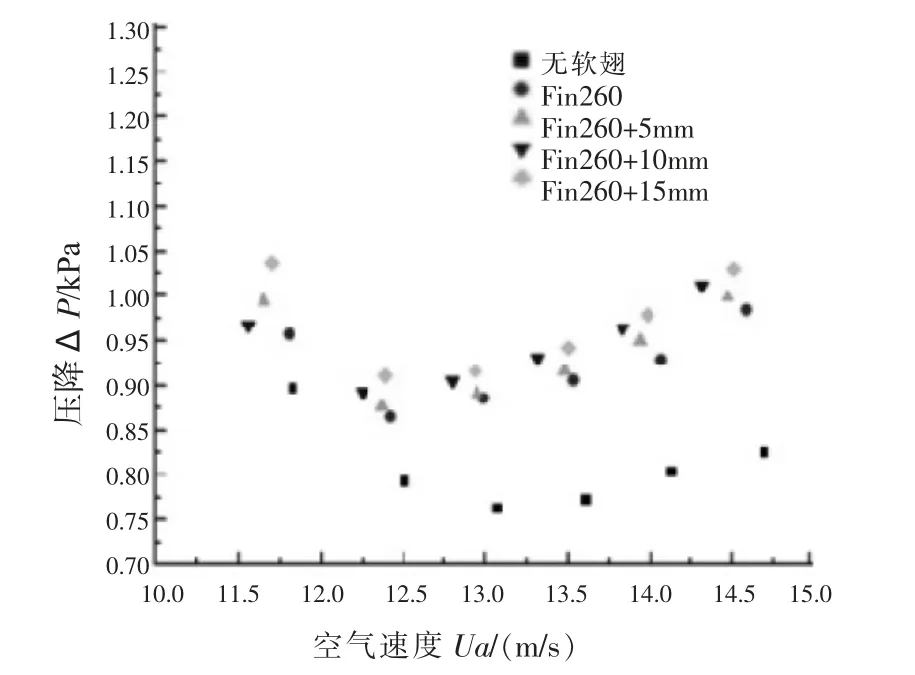
图10 各种方形柱体支撑器与软翅组合压降和空气速度之间的关系(Gs= 0.25 kg/s)Fig.10 Pressure drops of various square cylinder models with non-uniform fins versus the gas velocities(Gs=0.25 kg/s)
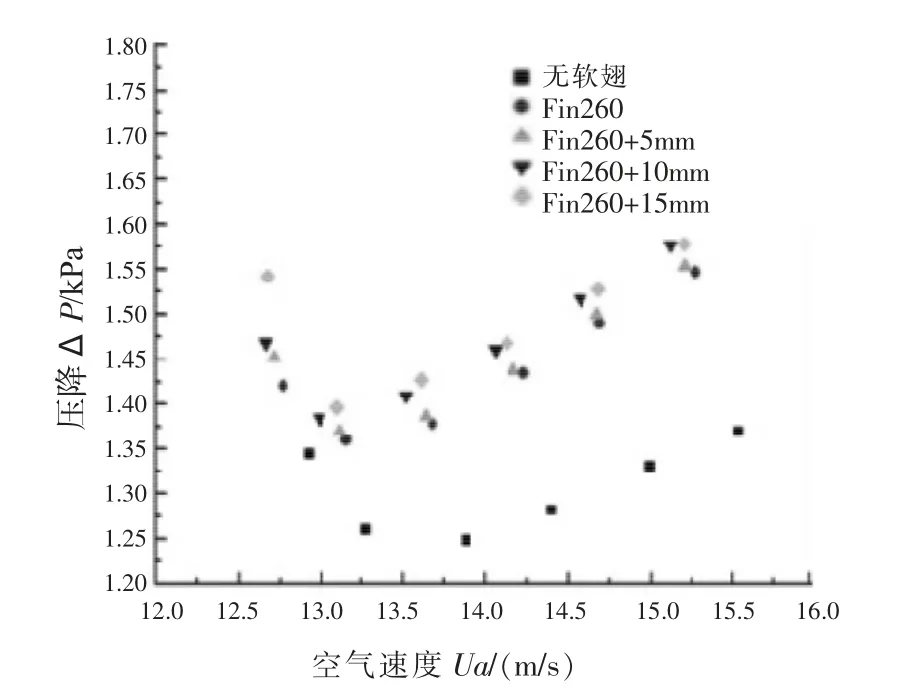
图11 各种方形柱体支撑器与软翅组合压降和空气速度之间的关系(Gs= 0.47 kg/s)Fig.11 Pressure drops of various square cylinder models with non-uniform fins versus the gas velocities(Gs=0.47 kg/s)
从图9、10 和11 显示,各模型下压降△P 随着气体速度的降低先减小,然后在达到最小压降后增加.Fin260 和Fin260+各个方形柱体支撑器与正常运输(无软翅)相比,在横轴(空气速度)的所有范围内压降都会增加.而且空气速度越大,正常输送的压降和安装了翅片等的压降之间的差异越大.
另一方面,当关注最小传输速度时,可以看出,在所有的颗粒质量流速的情况下,有翅片模型运输比正常传输(无翅片)低约0.8~1.0 m/s.其中Fin260+10 mm 的方形柱体支撑器的组合有着最小的输送速度.当Gs=0.10 kg/s、0.25 kg/s 和0.47 kg/s 时,使用Fin260+10 mm 的方形柱体支撑器的组合的最小输送速度降低率分别为6.54%、6.25%和6.41%.在各种颗粒质量流量的情况下,最小输送速度降低率差异不大.
由于软翅在空气的吹动下翅片发生振动,在颗粒进料口附近产生较大垂直气体速度分量的振荡尾迹,通过安装方形柱体支撑器,进一步增强气流的振荡,气体速度产生较高的垂直分量,测试的颗粒容易悬浮,从而避免了随着气体速度的降低颗粒沉积在管底.软翅和方形柱体支撑器的组合表现出良好的适应性,其中Fin260+10 mm 的方形柱体支撑器的组合的效率最高.
为了评估气力输送系统的能量损失,通常用功率消耗系数E 来描述水平气固流动的功耗.我们使用压降(△P)、气体体积流量(Q)、固体质量流量(Gs)和管道长度或输送距离(L)来计算该系数,如式(2)所示
式(2)中:g 代表重力加速度.图12、13 和14 分别显示了在颗粒质量流速Gs=0.10 kg/s、0.25 kg/s 和0.47 kg/s 的情况下,正常(无翅片)、Fin260 和Fin260+各方柱支撑器运输试验中的功率消耗系数和空气速度变化.
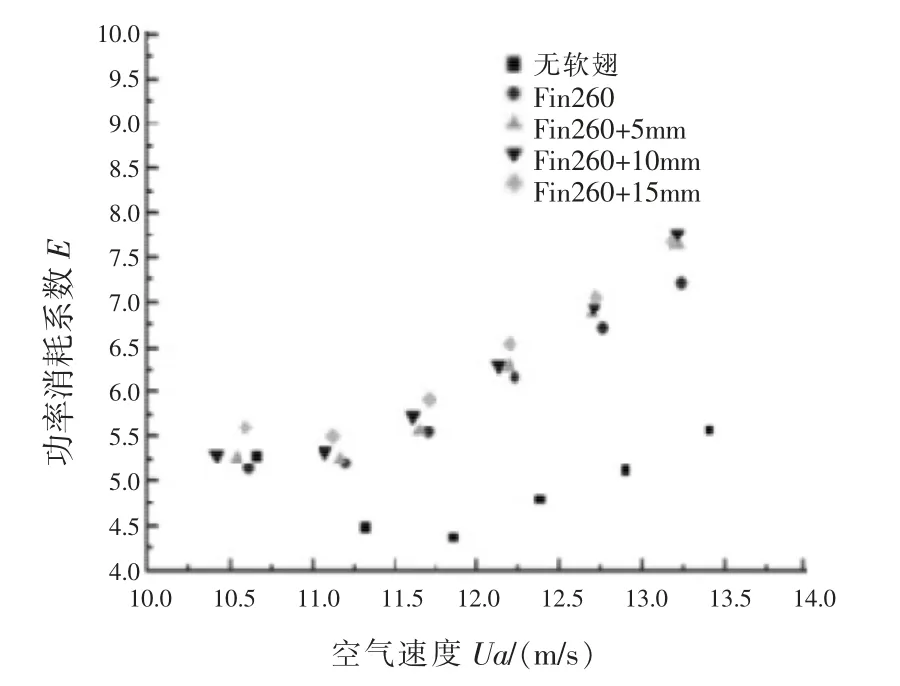
图12 方形柱体支撑器和软翅组合和传统运输之间功率消耗系数与空气速度的关系(Gs= 0.10 kg/s)Fig.12 Comparison of power consumptions between the square circular cylinder model with Fin260 and conventional(non-model)model(Gs=0.10 kg/s)
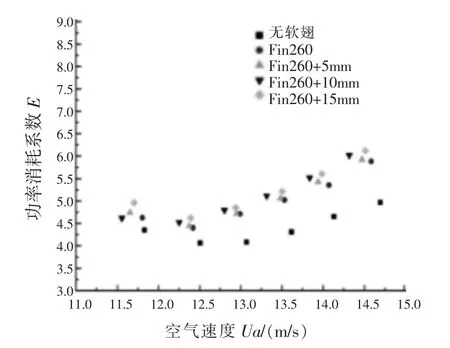
图13 方形柱体支撑器和软翅组合和传统运输之间功率消耗系数与空气速度的关系(Gs= 0.25 kg/s)Fig.13 Comparison of power consumptions between the square circular cylinder model with Fin260 and conventional(non-model)model(Gs=0.25 kg/s)
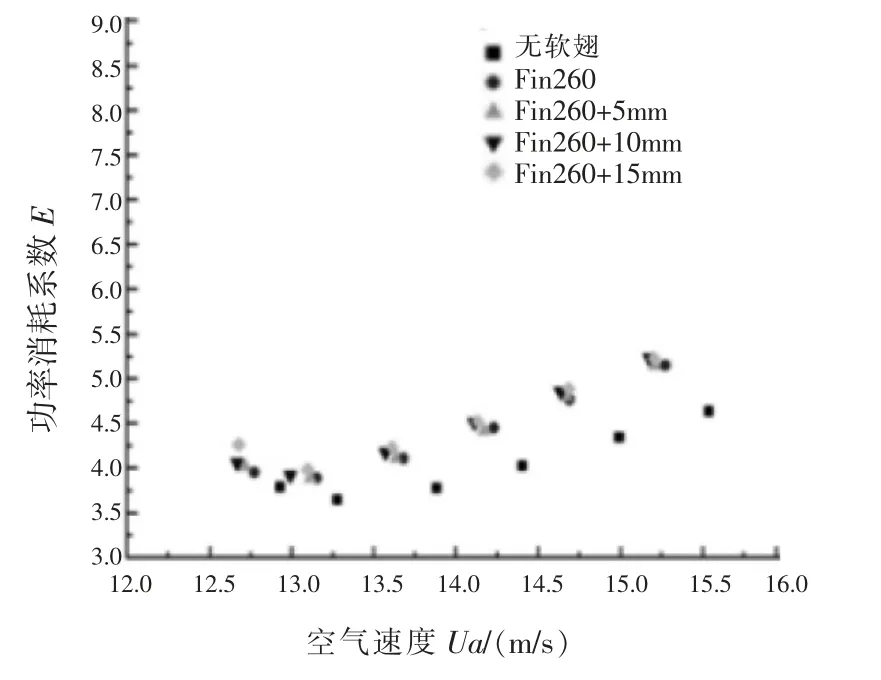
图14 方形柱体支撑器和软翅组合和传统运输之间功率消耗系数与空气速度的关系(Gs= 0.47 kg/s)Fig.14 Comparison of power consumptions between the square circular cylinder model with Fin260 and conventional(non-model)model(Gs=0.47 kg/s)
从图12、13 和14 中显示,与正常运输相比,在较低的空气速度范围内,有翅片模型时功率消耗系数与正常运输时的功率消耗系数无明显差异.但随着空气速度的增加,有翅片模型时功率系数大于正常运输时的功率消耗系数.然而,随着颗粒质量流量的增加,不同模型之间功率消耗的差异变小.将Fin260 与Fin260+各个方形柱体支撑器进行比较,随着方形柱体直径的增加,功率消耗系数值趋于增加.
2.2 气力输送系统速度的讨论
2.2.1 X 方向上平均速度的分布 为了研究振荡流对颗粒速度分布的影响,试验测量分析不同粒子质量流量下的速度分布.试验是在各个模型的最小输送速度下进行的.图15 和16 显示了在粒子质量流量Gs=0.25 kg/s,0.47 kg/s 下正常传输(无翅片)、Fin260 和Fin260+方形柱体支撑器时的粒子速度分布.纵轴是管的高度和内径(80 mm)相对于管底的无量纲数,横轴是粒子速度和各最小输送速度的无量纲数.
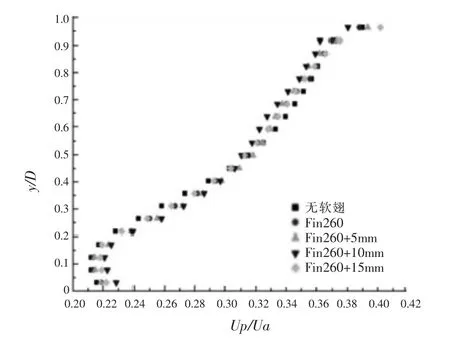
图15 粒子速度分布(Gs=0.25 kg/s)Fig.15 Particle velocity distribution(Gs=0.25 kg/s)
图15 和16 显示,分别在管道顶部和底部附近观察到最大和最小轴向颗粒速度.这是由于在最小输送速度下,管道顶部的颗粒浓度较低,而管道底部的颗粒浓度较高.
从图15 显示,对比软翅方形柱体支撑器组合模型和软翅模型以及正常运输模型,在y/D=0 到0.4 时粒子速度值较大,这一结果表明,模型产生了更有效的振荡流和更大的气体速度水平分量,颗粒在管道底部附近容易加速,从而证明了模型在气固流动中的有效性.而y/D=0.4 到1.0 时粒子速度值较小,这也减小了粒子高速区域颗粒之间的碰撞.图16 显示,对比所有模型,y/D=0~0.6 时,带翅片的颗粒速度值较大,而y/D=0.6~1.0 时则较小,因为与Gs=0.25 相比,颗粒质量流速增加了约0.2 kg/s,管道底部的低粒子速度的区域更大.
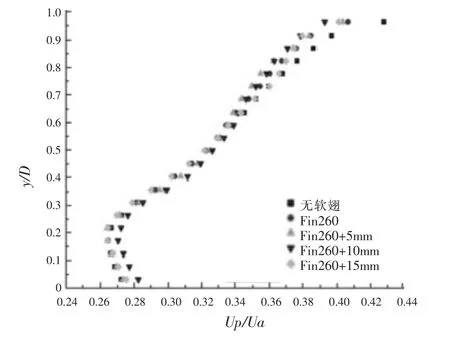
图16 粒子速度分布(Gs=0.47 kg/s)Fig.16 Particle velocity distribution(Gs=0.47 kg/s)
2.2.2 X 方向上速度波动分布的比较 在本研究中,粒子速度波动的强度,即粒子的局部均方速度波动,被用来评估模型对粒子波动能量的影响.
图17 和18 显示了在颗粒质量流速Gs=0.25 kg/s 和0.47 kg/s 的情况下,正常传输(无翅片)、Fin260和Fin260+方形柱体支撑器模型下的颗粒速度波动在x 方向的分布.纵轴为高度和管内径(80mm)相对于管底的无量纲数,横轴为x 方向波动强度和各最小输送速度的无量纲数.
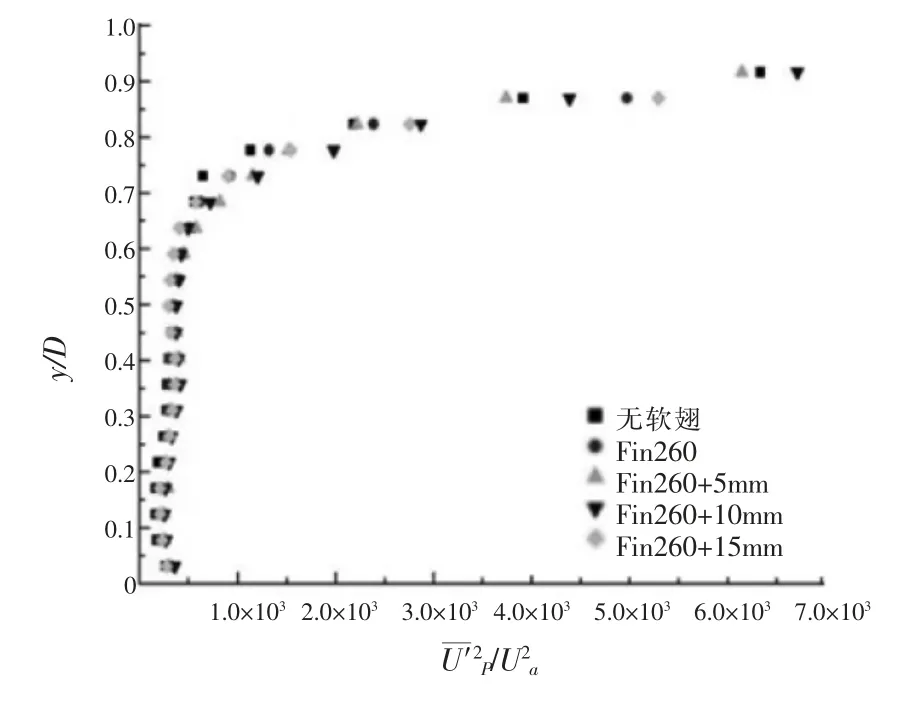
图17 X 方向的粒子速度变化分布(Gs=0.25 kg/s)Fig.17 Particle velocity variation distribution in X direction(Gs=0.25 kg/s)
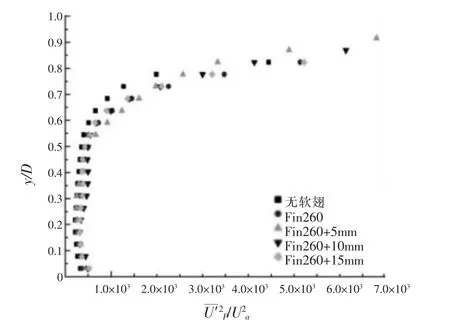
图18 X 方向的粒子速度变化分布(Gs=0.47 kg/s)Fig.18 Particle velocity variation distribution in X direction(Gs=0.47 kg/s)
从图17 和18 可以确认,在所有条件下,X 方向的速度波动强度从y/D=0.6~0.7 增加.比较正常运输和带翅片的情况,可以看出,带翅片的情况在所有范围内(y/D=0~1.0)都比无翅片的情况略高.这是由于翅片的振荡使颗粒产生了较高的波动能量,其中Fin260+10 mm 方形柱体支撑器组合的轴向速度波动最大,这说明了在这种模型下颗粒更容易被加速.说明合理的软翅和方形柱体支撑器的搭配更有利于粒子的运输,这也是Fin260+10 mm 方形柱体支撑器模型得到最低的压降和最小的输送速度的重要原因.
2.2.3 Y 方向上速度波动分布的比较 图19 和20 显示了在颗粒质量流速Gs=0.25 kg/s 和0.47 kg/s 的情况下,正常输送(无翅片)、Fin260 和Fin260+各个方形柱体支撑器装置在Y 方向上的颗粒速度波动分布.纵轴是高度和管子内径(80 mm)相对于管子底部的无量纲数,横轴是Y 轴变化强度和各最小输送速度的无量纲数,颗粒的垂直速度波动强度表示颗粒的悬浮能力.
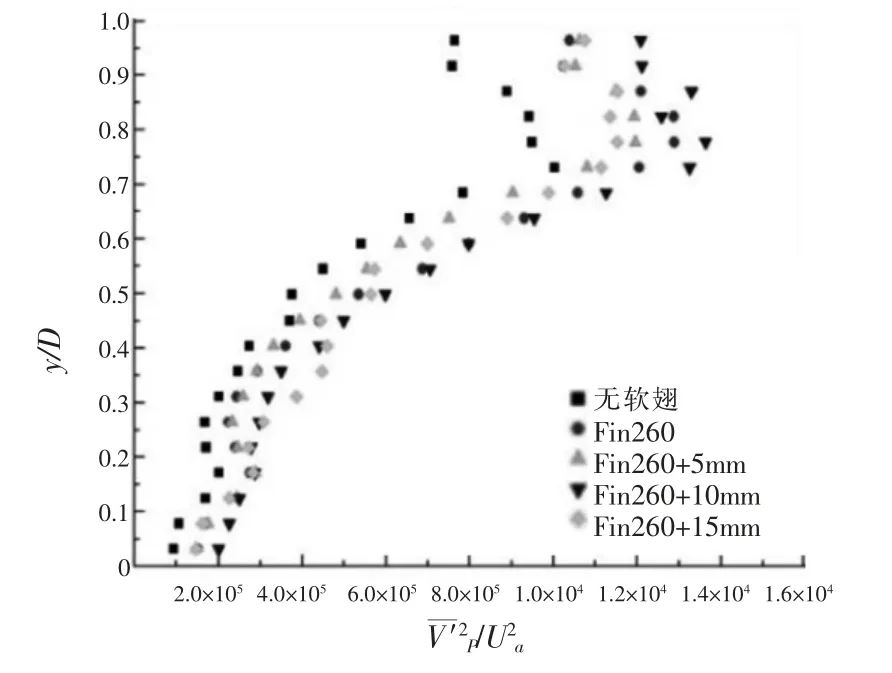
图19 Y 方向的粒子速度波动分布(Gs=0.25kg/s)Fig.19 Particle velocity variation distribution in Y direction(Gs=0.25kg/s)
图19 显示,对比所有条件,所有范围内(y/D=0~1.0)装有软翅片的Y 方向波动强度都比较大.这表明由模型引起的振荡流产生了更高的垂直波动速度,这有利于粒子的悬浮,对比装有方形柱体支撑器模型下颗粒速度波动强度,Fin260+10 mm 方形柱体支撑器组合的颗粒垂直速度波动最大,该模型下颗粒更有利于悬浮.图20 显示,在所有范围内,与Gs=0.25 kg/s 的情况相同,比较正常运输和安装了翅片等的情况,装有翅片的情况下的Y 方向波动强度更高.还可以看出,管道上部(y/D<0.7)的Y 方向波动强度比Gs=0.25 kg/s 的情况要小.对于Gs=0.47 kg/s,颗粒在管道中浓度更高,这可能是管道顶部的Y 方向波动强度略小的原因.
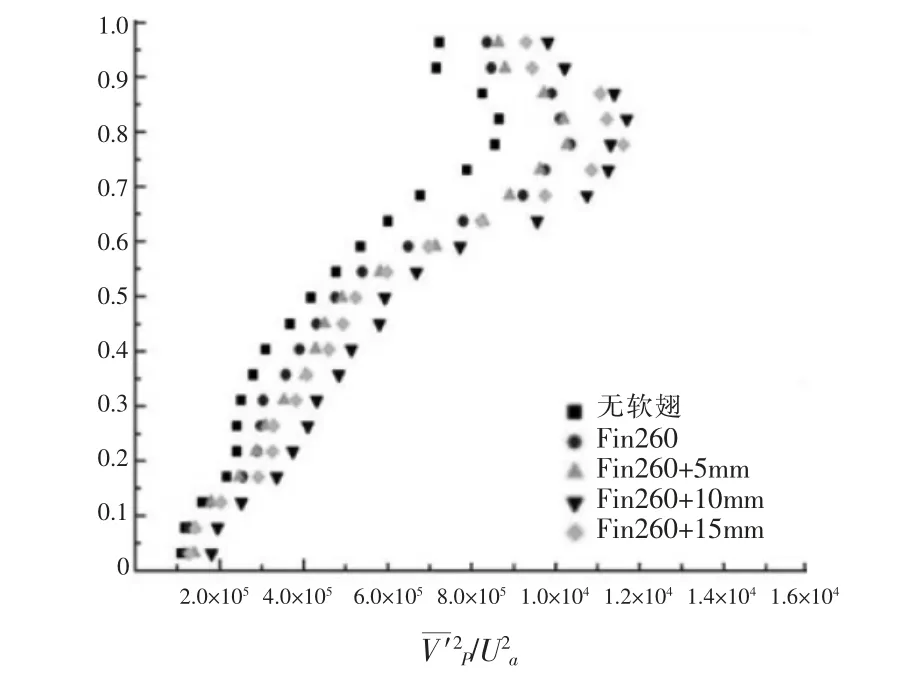
图20 Y 方向的粒子速度波动分布(Gs=0.47kg/s)Fig.20 Particle velocity variation distribution in Y direction(Gs=0.47kg/s)
基于上述结果,证明了安装在进气口水平面上的软翅能有效地引起振荡流,方形柱体支撑器的存在有效地增加了气流振荡,使颗粒悬浮在气固两相流中.这在加速区域有效地加速和悬浮粒子,颗粒在尾流的振荡中容易分散,因此可以防止管道的堵塞.
3 结论
本文提出了一种改进的软翅加上不同尺寸的方形柱体支撑器的组合, 将这些模型安装在颗粒进口前的水平面上可以有效地降低气体输送速度和功率消耗.通过对不同组合模型的气固流动进行比较,获得的主要结果如下:
(1)在低气速范围内,采用软翅片和方形柱体支撑器组合使用可以进一步降低压降、最小运输速度、功耗.
(2)Fin+10mm 方形柱体支撑器模型在最小输送速度附近产生最低的压降.在Gs=0.10 kg/s、0.25 kg/s和0.47 kg/s 时,使用该模型的最小输送速度的降低率分别达到6.54%、6.25%和6.41%.
(3)在气固两相流中,对比各个模型下X 方向颗粒速度波动,在任何情况下,有软翅的模型的颗粒速度波动均大于正常运输的颗粒速度波动,说明振荡流更利于加速颗粒水平方向上运输.
(4)无论采用何种组合模型,在管道的任何部位,带有软翅片模型的垂直速度波动均大于正常运输的垂直速度波动,其中Fin+10 mm 方形柱体支撑器模型在Gs=0.47 kg/s 的情况下,表现出最高的垂直速度波动.
(5)在气力输送系统中,软翅片和方形柱体支撑器模型的组合比单独的翅片能更强的悬浮和加速颗粒,还可以防止颗粒在管道中的沉积,这样就能以较低的速度进行运输,并能防止被运输的材料和管道的磨损.
