基于深度学习的实时点云修补算法
2023-06-10乔瑶瑶张兰兰
乔瑶瑶, 张兰兰
(黄河交通学院智能工程学院, 河南 焦作 454950)
1 引言(Introduction)
修补是点云预处理中的重要环节和基础,其主要是通过一定的先验信息对缺失点云进行修补。传统修补方法的先验信息为物体的基础结构信息,比如对称性信息和语义类信息等,因此传统方法在处理结构特征不明显的点云时效果不佳,而基于深度学习的方法在三维点云处理方面取得显著成效。PointNet[1]首次将深度学习方法应用到非结构化点云上;王春香等[2]利用GA-BP遗传算法优化神经网络对三维点云进行修补;吕富强等[3]利用随机森林算法对地表点云空洞进行修补;张艺真等[4]通过训练RBF神经网络对点云数据进行修补。然而,上述方法仅从单一的全局形状表征预测整个点云,大多面临着结构细节信息丢失的问题。为解决这一问题,本文采用基于深度学习的RL-GAN网络对缺失点云进行修补。RL-GAN网络是一种基于强化学习(Reinforcement Learning, RL)控制的生成对抗网络(Generative Adversarial Networks,GAN),可以从不完整点云数据中预测完整点云信息。利用强化学习实现点云修补,可以节约时间,实现点云的实时修补,并且对于大区域的缺失具有鲁棒性。
2 基于深度学习的实时点云修补方法(Real-time point cloud repair method based on deep learning)
基于深度学习的实时空洞修补算法的网络,它由三个基本模块组成,包括自编码器(Autoencoder, AE)、GAN和强化学习模块。每一个模块都是一个深度神经网络,需要单独训练。第一阶段,自编码器使用完整点云作为数据集进行训练,经过训练的编码器用于提取训练集中的每个点云的全局特征向量(Global Feature Vector, GFV)。第二阶段,使用提取到的GFV训练GAN。第三阶段,将强化学习模块中的强化学习智能体(Reinforcement Learning-agent, RL-agent)与预先训练好的自编码器和GAN进行联合训练,训练后的RL-agent 将为GAN的生成器选择合适的种子向量,使得生成器可以快速生成完整点云的GFV。该网络的前向传播如图1所示。
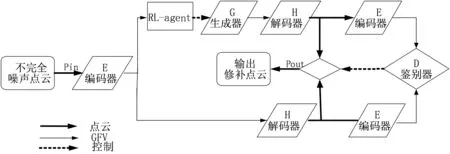
图1 网络的前向传播Fig.1 Forward propagation of the network
2.1 自动编码器
自编码器由编码器和解码器组成。编码器将复杂的输入转换为潜在空间表征,解码器将潜在空间表征还原到原始维度。自编码器是通过反向传播减少输入和输出点云之间的距离进行的训练。这里的点云距离可以采用推土机距离(Earth Mover′s Distance, EMD)[5],也可以采用倒角距离(Chamfer Distance,CD)。EMD用于衡量在某一特征空间下两个多维分布之间的不同。这里使用EMD作为损失函数,它是基于两个点云S1和S2之间的距离表示的:
其中,φ是S1到S2的双映射。
2.2 GAN
GAN网络主要由生成器和鉴别器构成,生成器将一个噪声包装成一个逼真的样本,鉴别器判断送入的样本是否为真实样本,在这个不断迭代的过程中,鉴别器对样本的判别能力不断上升,生成器的生成能力也不断上升,最终两者的能力达到平衡。生成器的期望是将所生成的数据送入鉴别器后,鉴别器能将其判别为真实数据,鉴别器的期望是能将所有的生成数据和原始数据区分开,二者在博弈的过程中共同提升性能。
GAN的训练模式一般会先固定生成器,迭代多次训练鉴别器,然后固定鉴别器训练生成器,两者依次交替,使用梯度下降的方法进行更新。GAN的训练可能表现出发散、不稳定性和模式崩溃等现象。为了解决这些问题,ACHLIOPTAS等[6]提出在潜在空间表征上训练GAN,他们的研究也表明在潜在空间表征上训练GAN比在原始点云上训练得到的结果更加稳定。GURUMURTHY等[7]也采用了该方法训练GAN网络。因此,本文采用该方法在GFV上训练GAN网络。
本文使用的生成器和鉴别器是SAGAN[8]网络的生成器和鉴别器,SAGAN的损失函数借鉴的是WGAN-GP[9]的损失函数。为了解决原始GAN网络训练困难、生成样本缺乏多样性及损失函数无法引导训练过程等问题,对改进的生成对抗网络(Wasserstein Generative Adversarial Networks-Gradient Penalty, WGAN-GP)做了一些更改,对于生成器和鉴别器的损失函数不再取对数,并且为鉴别器损失函数加上梯度惩罚项。鉴别器和生成器的损失函数分别如下:
LD=Ex~pdataD(x)-Ez~pzD(G(z))+d_gp
LG=-Ez~pzD(G(z))
其中,pdata是输入点云经过编码器编码生成的GFV的样本分布,D(x)是以x为输入和输出的鉴别器,并且x是在[0,1]之间的标量。G(x)是生成器,能够将噪声z包装成一个逼真的样本。d_gp是梯度惩罚项。
2.3 强化学习
在典型的强化学习框架中,智能体与环境一直处于互动状态,智能体发送动作至环境,环境返回状态和奖励。在每个时刻,智能体会接收到来自环境的状态,基于这个状态,智能体会依据一定的策略做出相应的动作,然后环境会依据一定的状态转移概率转移到下一个状态,与此同时,环境会根据此时状态的好坏反馈给智能体一个奖励。智能体可以根据环境的反馈调整其策略,然后继续在环境中探索,最终学习到一个能够获得最多奖励的最优策略。
这里训练一个基于演员-评论家的强化学习网络,该网络可以从连续的动作空间中学习到策略,然后使用学习到的策略控制GAN完成点云修补工作。基于演员-评论家的网络架构由智能体和环境组成,通过动作和奖励完成智能体和环境的交互。这里的环境是一个由自编码器和GAN组成的点云修补框架,动作是GAN生成器的输入,观测到的状态就是从不完整点云中编码获得的全局特征向量。假设环境具有马尔可夫性,并且是完全可预测的,也就是说最近的观测结果足以定义状态。智能体采取行动为生成器选择正确的种子,然后合成的全局特征向量通过解码器获得完整的点云形状。强化学习控制的生成对抗网络(A Reinforcement Learning Agent Controlled GAN Network, RL-GAN-NET[10])用到的是值优化和策略优化相结合的深度确定性策略梯度(DDPG)算法。本文采用双延迟深度确定性策略梯度算法(Twin Delayed Deep Deterministic Policy Gradient Algorithm, TD3)作为强化学习框架。
训练强化学习智能体的一个主要任务是建立正确的奖励函数。奖励函数通过对损失函数取相反数获得,也就是说,最大化奖励函数就等价于最小化损失函数,奖励函数re由re_emd、re_D、re_G构成,分别如下:
re_emd=-dEMD,re_D=-LD,re_G=-LG
re=α1re_emd+α2re_D+α3re_G
其中,α1、α2、α3是每个损失函数的权重,dEMD、LD、LG分别是自编码器AE、鉴别器D、生成器G的损失函数。
3 实验(Experiment)
3.1 实验数据集和网络实现细节
(1)数据集。使用ShapeNet数据集作为实验的数据集,每个类别包含不同的模型网格。所有的模型被平移至以原点为中心的位置,并且将模型进行缩放,使得其边框对角线的长度为单位长度。之后对模型进行均匀采样,生成包含16 384个点的点云数据作为完整点用于训练自编码器,并且通过自编码器编码的全局特征变量用于训练GAN网络。为了使输入的分布更接近真实世界的传感器数据,使用反向投影的深度图像作为不完整点云,得到的不完整点云作为测试集,并在完整点云数据集上训练强化学习智能体。
(2)网络实现细节。自编码器由编码器和解码器组成。编码器将输入点云转化成全局特征向量,解码器将全局特征向量转换成点云模型。编码器由5个一维卷积层组成,分别为64、128、128、256、128通道;解码器由3个全连接层组成,分别为256、256、6 144通道。每一层后面都跟着ReLu激活单元。通过减小输入点云与输出点云之间的EMD距离训练自编码器。
GAN网络是由自编码器的编码器、生成器和鉴别器构成。采用的是自注意的生成对抗网络的主要结构。生成器和鉴别器均由4个卷积层、1个一维转换卷积层及1个自注意机制网络组成。使用WGAN-GP对抗损失函数训练GAN网络,生成器每更新1次,则鉴别器更新5次。使用Adam作为优化器,其中生成器和鉴别器的学习率均设置为0.000 01,批处理设置为50。
强化学习模块由智能体和环境构成。使用基于演员-评论家的体系结构实现对GAN的连续控制,并且使用TD3算法训练。演员网络由3个全连接层组成,前两层使用ReLu激活,最后一层使用tanh激活。评论家网络由3层全连接层组成,前两层使用ReLu激活。
3.2 实验结果
使用来自ShapeNet的数据集测试所改进算法的有效性。实验网络输入的是缺失点云,期望得到的是高质量和高分辨率的补全点云。图2展示了本文方法在ShapeNet数据集上的修补结果,展示的分别是飞机、橱柜、汽车、椅子、灯具、沙发、桌子和船舶类缺失点云的修补结果。从图2可以看到,修补后的结果和实际点云可能不是每个细节都是对齐的,但是在语义上是合理的,并且不存在明显可见的空洞,修补结果达到了预期。图3展示的是桌子点云缺失不同部位和缺失程度不同的点云修补结果,修补结果良好,语义合理,没有明显可见的空洞。
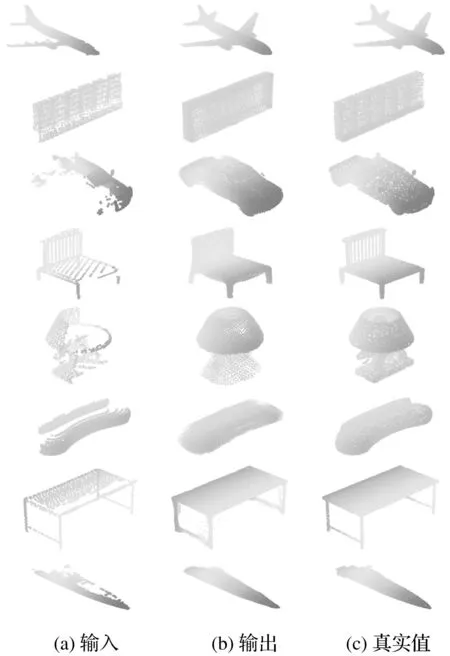
图2 ShapeNet数据集实验结果Fig.2 Experimental results of ShapeNet dataset

图3 不同缺失程度的点云修补结果Fig.3 Point cloud repair results with different missing degrees
3.3 实验分析
(1)修补时间。在ShapeNet数据集上测试点云修补完成的时间。使用训练好的模型进行点云修补测试,输入缺失点云,输出完整的点云。每一类修补所需要的平均时间如表1所示。从表1中可以看出,本文所提方法可以做到实时的点云修补。

表 1 点云修补完成时间Tab.1 Completion time of point cloud repair
(2)相似性度量。点云修补的一个挑战是如何与真实数据进行比较。现有的相似性度量主要包括倒角距离CD和推土机距离EMD,使用这两个度量作为评估指标。对于两个点云,CD测量一个点云中每个点到另一个点云中最近的点之间的平均距离,EMD要求两个点云的大小一致。
将本文方法与以下方法进行比较。3D编码器预测网络(3D-Encoder Predictor Network, 3D-EPN[11])是大型合成数据集端到端的训练,是体素修补方法的代表。为了进行比较,将3D-EPN的距离场输出转换为点云,提取等值面,在生成的网格上均匀采样16 384个点。融合卷积自编码器(Fusion Convolutional Autoencoder, FCAE)使用直观的自编码器,编码器与PointNet中的相似,解码器是一个全连接层,使用倒角距离作为该方法的损失函数。三维形状曲面深度学习生成网络(AtlasNet[12])使用类似的编码器,每次前向传播能输出2 500个点,将多次传递的生成点进行组合。点云补全网络(Point Completion Network, PCN)也使用自编码器完成点云的修补,它使用PointNet的改进版本作为编码器,并以由粗到细的方式生成点云,从中随机抽取16 384个点进行比较。
定量结果见表2和表3,从中可以看出,本文方法在CD和EMD两个方面都优于3D-EPN、FCAE、AtlasNet和PCN方法。EMD在点云比较方面更具有判别性和说服力。在所有类别中,本文方法的EMD是最低的,表明了该方法的优越性。EMD在不同的对象类别中是不同的,这表明完成不同类别的困难是不同的。具体来说,在数据集中有更多数量的飞机和汽车,由于它们的结构相对简单和稳定,因此它们更容易完成。相比之下,在数据集中的各种灯是相对孤立的,因此更难完成。就CD而言,不同方法和对象类别之间的差异相对较小。虽然本文方法使用EMD作为损失函数,但是在CD方面也是优于其他方法的。
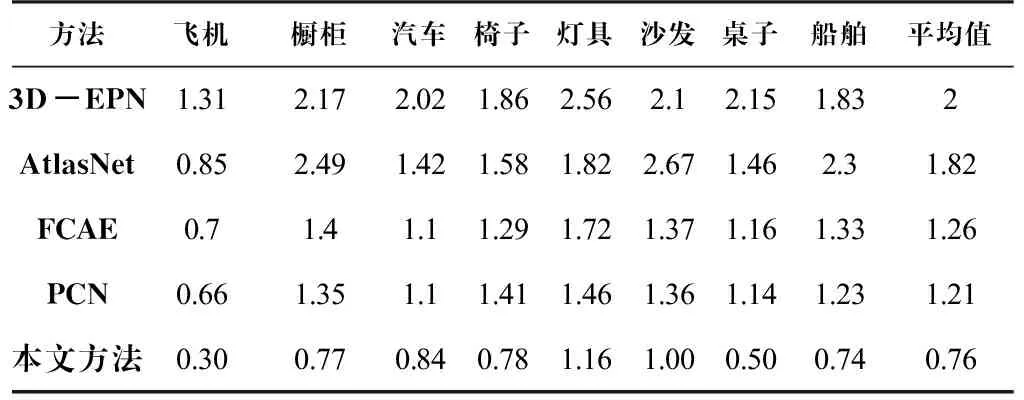
表 2 ShapeNet数据集结果定量比较:CD×100Tab.2 Quantitative comparison of ShapeNet dataset results: CD×100
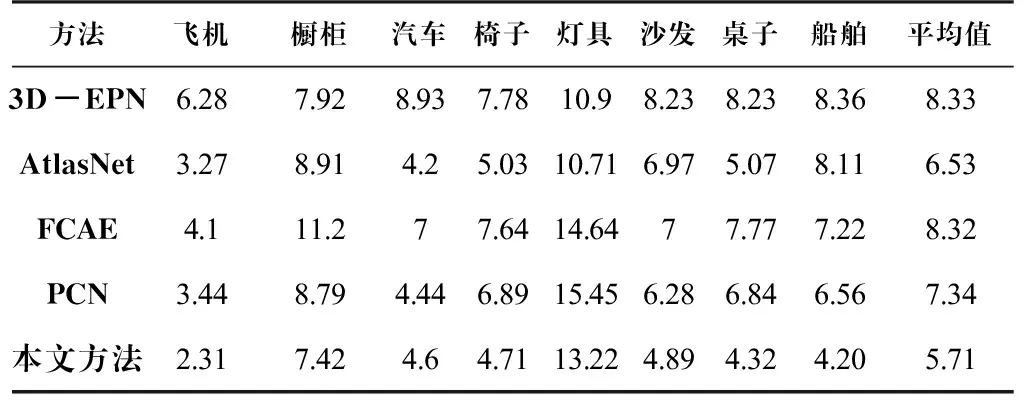
表 3 ShapeNet数据集结果定量比较: EMD×100Tab.3 Quantitative comparison of ShapeNet dataset results: EMD×100
4 结论(Conclusion)
本文提出一种基于深度学习的实时点云修补算法,其主要目的是从不完整点云中生成完整点云,实现对不完整点云的实时修补,其中强化学习可以为GAN网络提供快速而稳定的控制,通过控制GAN将输入点云数据转换为具有高保真度的完整点云。为了能够实现实时的点云修补,一方面使用强化学习智能体控制生成器,另一方面该网络删除了成本高且复杂的优化过程,将损失函数转化为奖励函数。该网络可以较为稳定地补全含有大面积缺失区域的点云。在数据集ShapeNet上进行实验,实验表明本文所提方法在点云修补上可以实现不完整点云的实时修补,可以将部分点云数据转换成符合语义的完整点云。