盐碱地蒙古黄芪起收装置仿真设计研究
2023-03-31永生金宏亮于潇泽
永生 金宏亮 于潇泽

摘要:盐碱地蒙古黄芪收获主要采用人工起收方式,劳动强度大、作业效率低、损失率高。设计一种适于盐碱地的蒙古黄芪收获机,可一次性完成挖掘、根土破碎、分离、输送和集中堆放等作业过程,能有效提高盐碱地蒙古黄芪的收获作业质量。借助仿真模拟方法对机架与挖掘装置进行强度校核与模态分析,结果表明:机架所受最大应力为41.62 MPa,挖掘装置所受最大应力为66.73 MPa,均小于材料屈服极限220 MPa;机架模态固有振动频率最小值为38.99 Hz,最大值为99.30 Hz,挖掘装置模态固有振动频率最小值为39.97 Hz,最大值为236.11 Hz,均大于机组工作时所受的激励频率,满足设计要求。
关键词:蒙古黄芪;盐碱地;仿真分析;强度分析;模态分析
中图分类号: S225;S567 文献标识码:A 文章编号:1674-1161(2023)06-0047-03
我国是受土壤盐渍化危害最为严重的国家之一,西北、华北、东北及沿海地区各省区均有盐碱地分布,其中内蒙古自治区不同程度的盐碱化耕地和草原总面积已经超过了333.33万hm2。随着全球气候变暖、环境污染加剧、城市化进程加速及灌溉农业发展,部分地区耕地盐碱化趋势加重,已成为限制种植业发展的主要因素[1]。目前,现有国土面积中可用耕地面积为1.28亿hm2,而盐碱地总面积达1亿多hm2,其中80%的盐碱地通过有效治理可发展为耕地。因此,切实加强耕地保护,全力提升耕地质量,充分挖掘盐碱地的综合利用潜力,有助于稳步拓展农业生产空间,提高农业综合生产能力。因地制宜利用盐碱地、将“以种适地”同“以地适种”相结合、加快选育耐盐碱特色品种、大力推广盐碱地治理改良的有效做法、加强盐渍土生物治理与综合开发、提高植物耐盐性,是种植业的重大课题[2]。
部分中药植物具有较好的耐盐碱特性,同时适度的盐碱胁迫、干旱胁迫有助于提高中药材药效成分含量,蒙古黄芪就是典型代表之一。蒙古黄芪根可入药,具有补气升阳、固表止汗、利水消肿、生津养血、行滞通痹、托毒排脓、敛疮生肌的疗效。2020年初,预防新型冠状病毒肺炎所使用的诸多中药中,大多含有蒙古黄芪[3]。蒙古黄芪一般采用先育苗后移栽的种植方法,种苗在种植培育1 a后收获,第2 a春再移栽至经过粉垄耕作的盐碱地中。蒙古黄芪移栽后生长周期为2 a,收获时要深挖土壤,同时避免挖断主根或碰伤外皮,以免影响药材品质。目前为保证黄芪品质,通常采用人工起收,即农民先将地上茎秆部分割掉,借助挖掘铲将根茎刨出,去净泥土后再将根茎打捆。由于盐碱地土壤板结严重,人工起收黄芪的工作具有劳动强度大、效率低、成本高、收获损失率高、经济效益差等劣势,这也成为制约盐碱地蒙古黄芪种植产业发展的瓶颈[4]。为此,设计一种适用于盐碱地的蒙古黄芪收获机,能够一次性完成挖掘、根土破碎、分离、输送和集中堆放等作业过程,从而为有效提高盐碱地蒙古黄芪的收获机械化率提供技术支持。
1 整机结构
1.1 工作原理
蒙古黄芪收获机的结构组成如图1所示。
收获机主要由机架、传动装置、变速器、振动分离装置、曲柄连杆机构、挖掘装置、侧壁板、机架、悬挂装置等组成,可以一次性完成挖掘、起苗、根土分离、输送、集中堆放等作业。振动分离装置由动力轴、偏心轮、连杆等零件组成。挖掘工作时,动力轴与变速器连接带动偏心轮一起转动,偏心轮通过连杆与分离装置支架后端铰接,并借助曲柄连杆机构的运动特点来带动分离装置形成往复振动。机具动力由拖拉机提供,其采用三点悬挂的方式与拖拉机连接。种苗起收作业时,由拖拉机的液压悬挂装置控制入土,机组沿作业方向前进挖掘铲,土壤和黄芪的复合体在挖掘铲和机组作用下沿着挖掘铲向后相对移动,在经过振动分离装置的抖动、疏松、破碎后落入地面[5]。
1.2 蒙古黄芪收获机的参数确定
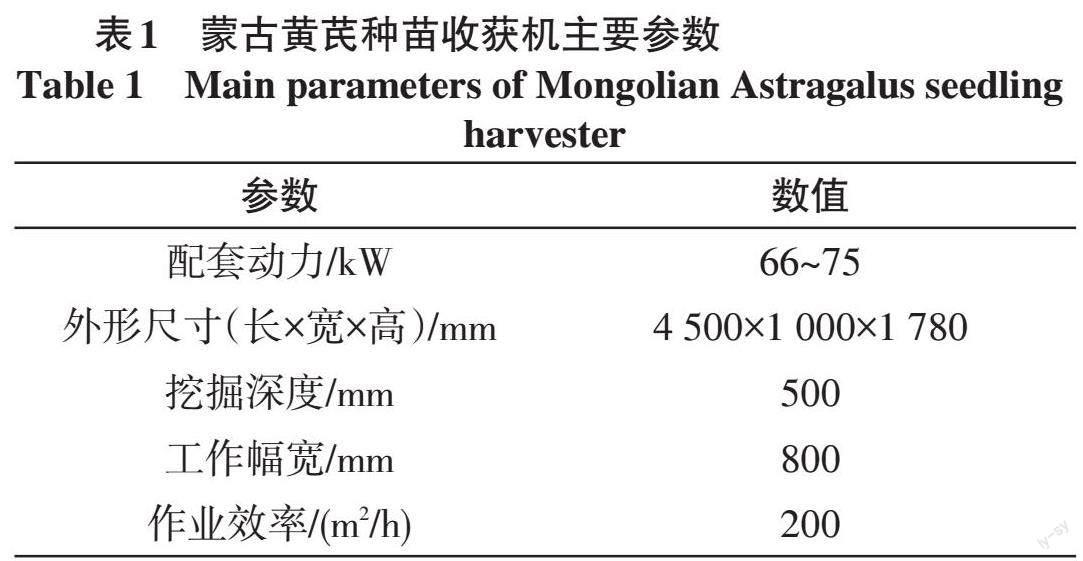
根据当地蒙古黄芪的种植农艺要求,移栽株距为20 cm×40 cm,同时设计机具作业可以一次性完成2~3行药材收获。与一般耕地作业环境相比,盐碱地内土壤硬度高、粘性大,因此为了尽可能降低机具对种苗的损伤,同时保证机组具有较高的作业效率,收获机运行速度的合适范围应设置为2 km/h≤V1≤2.5 km/h[6]。具体参数见表1。
2 机架仿真分析
2.1 静力学分析
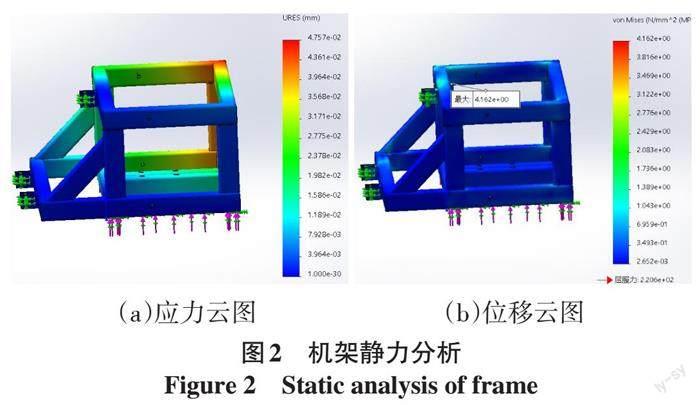
工作状态下,悬挂架固定几何体为模型約束条件。将机架和各零部件重力以及挖掘装置和振动分离装置所受的工作阻力分别加载到机架的对应位置上。仿真结果如图2所示。
由图2可知。工作状态下,机架所受最大应力为41.62 MPa,小于材料屈服极限220 MPa,危险截面安全系数2.9,满足机架的强度要求。
2.2 模态分析
利用模态分析方法,研究机架在该状态下的固有频率和相应模态下的振动形式。分析得出机架前4阶模态固有振动频率分别为38.99、43.34、74.46、99.30 Hz。对应模态振型如图3所示。
由图3可知,前4阶模态的振动分别为水平振动、上下振动、前后振动和扭转振动。此状态下,机架固有频率最小为38.99 Hz,4阶以上模态固有振动频率均大于32.56 Hz,高于机具工作时所受的激励频率,不会发生大位移形变,因此机架满足设计要求。
3 挖掘装置仿真分析
3.1 静力学分析
工作状态下,假设机组匀速运动,并认为此时的挖掘装置受力平衡。挖掘装置几何体为模型约束条件。将挖掘装置所受的工作阻力分别加载到挖掘装置的对应位置上,如图4所示。
由图4可知,挖掘装置所受最大应力为66.73 MPa,且位于挖掘装置中间附近,小于材料屈服极限220 MPa,最大合位移为3.49 mm,危险截面安全系数2.9,满足挖掘装置的强度要求。根据应力集中位置的特点,可以将中间位置处的挖掘铲进行强化处理,同时设计时可以适当增加中间位置挖掘铲的长度,从而使挖掘装置更有利于入土。
3.2 模态分析
根据挖掘装置的受力情况,对挖掘部件进行模态分析,并研究在该状态下的固有频率和相应模态下的振动形式。分析算例的模型、材料、夹具,载荷等参数设置同静力学分析一致。分析得出挖掘装置前4阶模态固有振动频率分别为39.97、115.9、122.26、236.11 Hz。对应模态振型如图5所示。
由图5可知,前4阶模态的振动分别为挖掘装置宽度方向的水平振动、竖直方向的上下振动、以挖掘装置中间位置为中心的扭转振动和行进方向的前后振动。此状态下的挖掘装置固有频率最小为39.97 Hz,4阶以上模态固有振动频率均大于32.56Hz,高于机组工作时所受的激励频率,不会发生大位移形变,且静力学分析下的挖掘装置有充足的安全系数,满足挖掘装置在田间作业状态下的设计要求。
4 结论
通过分析计算与仿真相结合的方法,设计一种蒙古黄芪种苗收获机。该机能够一次性完成蒙古黄芪种苗的挖掘、根土分离输送和集中堆放等作业,提高了收获效率。通过理论计算和软件分析的方法来对机架和挖掘装置进行强度校核,并利用SolidWorks软件来分析机架在作业状态下的振动特性。结果表明,机架所受最大应力为41.62 MPa,挖掘装置所受最大应力为66.73 MPa,均小于材料屈服极限220 MPa;机架模态固有振动频率最小值为38.99 Hz,最大值为99.30 Hz,挖掘装置模态固有振动频率最小值为39.97 Hz,最大值为236.11 Hz,均大于机组工作时所受的激励频率,满足设计要求。
参考文献
[1] 李紫岩,朱寿东,刘澜波,等.内蒙古地区道地药材蒙古黄芪生态适宜性区划研究[J].中国农业科技导报,2021,23(2):170-176.
[2] 陈学深,方贵进,黄旭楠,等.根茎类药材收获机的设计与试验[J].农机化研究,2020,42(8):61-67+73.
[3] 田亮,曹成茂,张远,等.联合式前胡收获机设计与试验[J].安徽农业大学学报,2022,49(5):815-822.
[4] MEHTAB ALAM,YUAN-JUN JIANG,MUHAMMD UMAR.Influence of drainage and root biomass on soil mechanical behavior in triaxial tests[J]. Acta Geotechnica,2021(4): 34-42.
[5] 许渊,王峰,张方圆,等.黄芪收获机分离装置的设计与仿真分析[J].林业机械与木工设备,2020,48(10):14-19.
[6] 张兆国,薛浩田,王一驰,等.基于离散元法的三七仿生挖掘铲设计与试验[J].农业机械学报,2022,53(5):100-111.
Research on Simulation Design of Mongolia Astragalus Pick-Up Device in Saline-Alkali Land
YONG Sheng1, JIN Hongliang2, YU Xiaoze1*
(1. Key Laboratory of Intelligent manufacturing technology, Inner Mongolia Minzu University, College of Engineering,Tongliao Inner Mongolia,028000,China; 2. Jiangxi Xintong Machinery Manufacturing Co., LTD., Pingxiang Jiangxi 337000, China)
Abstract: The harvest of Mongolian Astragalus in saline-alkali land mainly adopts the manual harvesting method, which has low labor intensity, low efficiency and high loss rate. A Mongolian Astragalus harvester suitable for saline-alkali soil is designed, which can complete the digging, root soil crushing, separation, transportation and centralized stacking at one time, and can effectively improve the harvesting quality of Mongolian Astragalus in saline-alkali soil. Meanwhile, the strength check and modal analysis of the frame and digging device are carried out by means of simulation. The results show that: The maximum stress of the frame is 41.62 MPa, and the maximum stress of excavating device is 66.73 MPa, both of which are less than the material yield limit of 220 MPa; The minimum modal natural vibration frequency of the frame is 38.99 Hz, the maximum is 99.30 Hz, and the minimum modal natural vibration frequency of the mining device is 39.97 Hz and the maximum is 236.11 Hz, both of which are greater than the excitation frequency of the unit during operation, and meet the design requirements.
Key words: Mongolian Astragalus; saline-alkali land; simulation analysis; strength analysis; modal analysis
收稿日期:2023-11-20
基金項目:内蒙自治区高校直属项目(GXKY22126);内蒙古自治区自然科学基金项目(2023LHMS05005)
作者简介:永 生(1990—),男,硕士,实验师,研究方向为农业机械工程。
通信作者:于潇泽(1984—),男,博士,副教授,研究方向为智慧农业及农业智能装备。