多率量测下随机跳变系统迁移交互多模型估计
2023-01-16栾小丽赵顺毅
高 爽 栾小丽 赵顺毅 刘 飞
由于测量手段的不同,导致量测数据具有不同 的特征,如常规传感器量测数据与在线分析仪数据相比,虽然采样速率高,但数据精度较低[1-3];对于飞航导弹而言,高采样速率的惯导数据短期动态品质好,而双星定位系统在较长的时间内,可以提供精度较高的位置信息[4].因此,为了获得更精确的状态估计值,在立足常规量测值时,如何更好地利用辅助量测数据引起了国内外学者的广泛关注.其中,融合策略是一种常见的方法,如航迹融合方法[5](Track to track fusion,TTF) 利用相关性对不同滤波器的估计值进行融合,并广泛应用于信息融合领域.后来,各种延伸的融合估计方法被陆续提出[6].然而,上述融合策略局限于各类传感器采样周期一致的情况,当采样速率不同时,估计策略往往在常规量测的基础上,利用额外的量测数据对其进行修正.换言之,额外量测值仅仅是锦上添花.鉴于此,学者们提出了不同额外信息利用策略来提升状态估计效果[7-9].如文献[10]提出当慢速率数据可获得时,利用数据融合的方法将不同量测数据下获得的估计值进行融合.进一步,最优融合策略[11]也被用来处理不同量测数据下卡尔曼滤波器获得的估计值,针对最优求解困难的问题,文献[12-13]从智能学习的角度提出了新的优化策略.在此基础上,文献[14]考虑到噪声参数的不确定性,利用修正后的卡尔曼滤波器估计值进行融合,并分析了其收敛性.另一方面,考虑到多率量测信息之间噪声的相关性,文献[15]采用矩阵加权的方法,提出了最小方差意义下的分布式融合估计策略.进一步,文献[16]将噪声信息从高斯分布推广到 t 分布以增强估计性能的鲁棒性.
除了上述针对单一模态系统在多率量测下的状态估计,近年来,随机多模态系统在多率量测下的状态估计也取得了很大进展.文献[17]将TTF 融合方法从单一模态系统拓展到跳变系统,然而,其融合权重依赖于协方差矩阵.后来,文献[18-19]利用一致性理论,在多模型框架下提出了分布式融合策略.文献[20]则提出了一种基于融合预测的交互多模型算法,通过修改交互多模型算法 (The interacting multiple model,IMM)融合预测来最小化噪声和低数据率的影响.文献[21]在高斯混合概率假设的滤波框架下,提出了多级协同的融合方法.针对多个局部无序量测数据,基于最优线性无偏估计,文献[22]提出了一种具有多个任意阶跃滞后的最优集中估计算法.文献[23]提出了一种连续多速率采样数据融合方法设计网络滤波器,解决多传感器异步采样难题.另一方面,基于H∞策略的鲁棒交互式多模型算法也陆续被提出[24-26],这些文献采用最优信息融合准则实现不同量测信息下的融合.另外一种可行的思路是借鉴变结构多模型估计思想[27-28],将慢速率量测的估计值作为一种新的模态嵌入到多模型框架中.虽然上述融合策略可以借助于额外信息,从不同角度为多率量测下的状态估计提供了可能,但其本质是对估计结果的折衷与加权,即额外信息的利用并没有改变状态估计器的本质结构,更无法量化慢速率辅助量测信息对估计精度的影响.
因此,本文针对具有多率量测信息的随机跳变系统,从迁移学习的角度设计一种新的交互多模型估计器.该方法利用源域滤波器处理缓慢、不规则采样且不易获得的高精度辅助量测数据,而通过目标域滤波器处理快速、规则采样和无延迟的常规量测数据.同时,利用平滑策略实现源域慢速率辅助量测信息到目标域快速率数据的知识迁移.然后,通过定义利用常规量测数据获得的待估计状态的后验概率与引入高精度辅助量测数据获得的待估计状态的后验概率之间差异性度量方法,求解最优的贝叶斯迁移估计器,实现辅助信息的充分利用,提高了估计精度.本文的创新点和贡献主要体现在以下4 个方面:1) 不同于融合策略,在迁移估计器的结构中,嵌入了迁移平滑步,实现辅助量测信息有效利用的同时,解决多率量测下的贝叶斯估计难题;2) 利用平滑策略不仅架起了源域滤波器与目标域滤波器之间知识传递的桥梁,也将贝叶斯迁移学习拓展到多率量测下的状态估计领域;3) 设计的迁移滤波器能同时学习源域和目标域中包含的知识,可以提高估计精度;4) 构建了辅助量测数据与估计性能之间的解析关系,可以定量评价源域数据的引入对估计性能的影响.
1 问题描述
考虑如下马尔科夫跳变系统,并假设系统可以获得多种量测数据,以图1 中的两种为例.

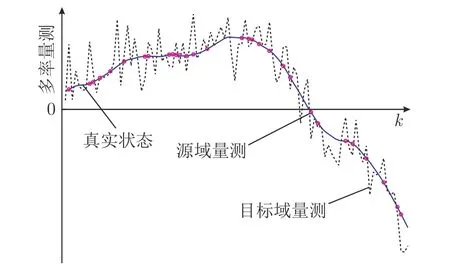
图1 多率量测过程 (实线表示真实状态,虚线表示目标域量测 (在线快速率数据),点表示源域量测 (离线化验数据),其采样时间可能不规律)Fig.1 Multiple source measurements of the process with different sampling rates (Solid lines are true states,and dashed lines represent target measurements.Dots denote source measurements,whose sample time may be irregular)

本文的任务是在快速率、规则但不精确的量测情况下,辅以慢速率、不规则但更精确的源域数据,设计迁移贝叶斯估计器,对系统 (1)~(3) 的状态进行估计.假设源域滤波器处理慢速率辅助量测数据,目标域滤波器处理常规快速率量测数据,由于源域数据yS,k比目标域量测数据yk更加精确,故源域噪声方差RS,k比目标域噪声方差Rk小.同时,通过迁移估计,将源域滤波器提取的知识迁移到目标贝叶斯滤波器,实现估计精度的提升.
在贝叶斯估计中,后验概率密度函数 (Probability density function,PDF) 提供了状态变量的完整描述[29],因此根据系统的量测数据Yk={y0,···,yk},贝叶斯估计的任务是计算后验概率函数p(xk,rk|Yk). 基于此,本文利用概率分布FS刻画从源域滤波器迁移的知识,因此,任务转变成求解给定源域知识下的后验分布,即
2 迁移估计器的设计
根据贝叶斯公式,条件后验分布计算如下

其中,∝表示正比符号,本文假设迁移知识的形式为源域滤波器中量测边缘分布,即约束似然函数为

因此,知识迁移后的后验分布为
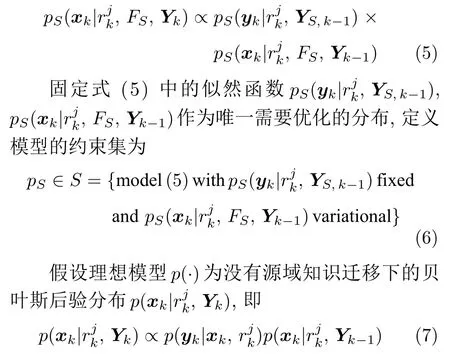
利用KL (Kullback-Leibler) 散度量化引入源域数据的修正分布与贝叶斯后验分布之间的距离[30-31],即在知识约束的集合内对滤波分布进行优化求解

2.1 迁移平滑策略
从式 (9) 的迁移修正步可以看出,贝叶斯迁移中知识迁移的形式为迁移源域滤波器中量测边缘分布而非源域量测数据,可用下式计算
由于慢速率源域量测数据稀疏,式 (11) 中上一时刻的源域滤波器后验分布难以获得.且直接利用上一时刻目标域的估计值代替并不能获得满意的结果.因此,如何近似求解源域一步滞后估计值是实现迁移的关键.本文利用平滑策略结合源域当前时刻可获得估计值与目标域上一时刻的估计值,即用平滑分布近似代替源域滤波器后验分布进一步推导可得

注1.不同于传统处理当前与未来量测值的平滑策略,本文所提平滑策略结合源域与目标域滤波器的估计值,获取待迁移的估计值.
2.2 迁移交互多模型算法
基于上述分析,面对多率量测信息时,针对马尔科夫跳变系统,可设计如图2 所示的迁移估计器结构,混合交互步与IMM 形式一致,即

图2 迁移交互多模型估计器结构图Fig.2 Basic operation diagram of the transfer interacting multiple model state estimator


2.3 估计性能评价
为了定量分析源域数据的引入对估计性能的影响,本节利用影响力函数[32-33]来刻画源域数据迁移对估计性能的影响,量化源域数据的引入对估计精度影响的程度.定义损失函数如下
根据附录D 提供的推导,源域数据对估计精度的影响力值可由下式计算得到
图3 展示了源域数据的引入对迁移估计器的影响力函数 (Influence function,IF) 曲线和均方根误差 (Root mean square errors,RMSEs) 曲线,可以看出IF 曲线变化趋势与RMSEs 趋势一致,即影响力函数可以有效地用于量化源域数据引入后对估计精度的影响,在对估计性能进行定量分析的同时,也为源域数据质量的评价提供了新的手段,可以有效避免负迁移.

图3 源域数据对迁移估计器的影响力曲线Fig.3 The influence function of source measurements on the transfer state estimator
3 结果与分析
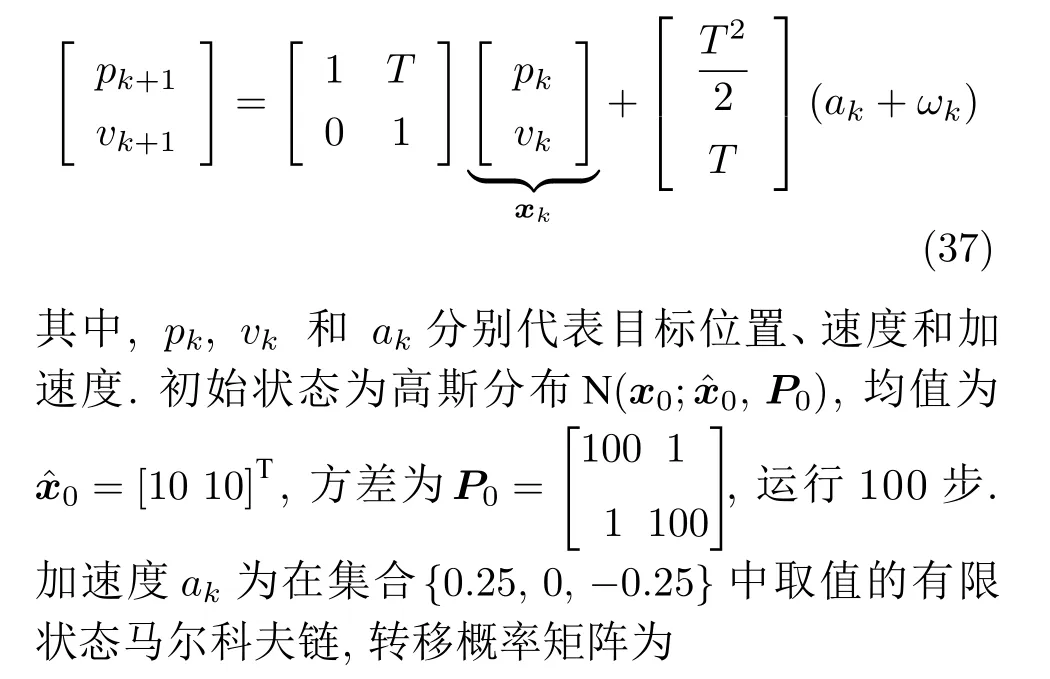
本节利用运动目标跟踪例子来说明所提迁移交互多模型估计算法 (Transfer interacting multiple model state estimator,IMM-TF) 的有效性,并与如下3 种方法进行对比:1) 交互多模型算法 (Interacting multiple model,IMM),该算法没有源域数据迁移,在这里作为基准;2) 交互多模型融合算法(Interacting multiple model fusion,IMM-FU),该算法是多模型下的TTF 常规融合方法;3) 变结构交互多模型算法[34](Variable structure interacting multiple model,VSIMM),该方法把利用源域数据得到的估计值作为新的模态嵌入到IMM 结构中.基于蒙特卡洛采样计算的RMSEs作为估计性能指标.假设目标的加速度根据有限状态马尔科夫链演化,动力学方程可描述为
在仿真中,源域量测数据与目标域量测数据的比例为3:5.基于400 次蒙特卡洛仿真,图4 给出了不同算法下的均方根误差,可以看出,IMM-TF 估计性能明显优于IMM、IMM-FU和VSIMM 算法.

图4 不同算法在运动目标跟踪中的均方根误差Fig.4 RMSEs of different algorithms for the moving target tracking
此外,本文分析了源域数据数量和质量对估计性能的影响,表1 展示了估计精度随着源域数据比重的增加而增加,说明该方法具有正迁移特性.在图5 中,本文用不同的量测噪声方差RS刻画源域数据质量,让RS从{0.1,1,10,100,1 000}中取值,分别对应5 种情况,图中以位置估计效果为例,可以看出当RS<R时,即源域数据质量高于目标域数据质量时,源域数据质量越高,迁移效果越好,当源域数据质量低于目标域数据质量时,迁移效果甚至不如IMM.图6 进一步展示了利用本文所提的基于影响力值的迁移估计器算法 (Influence function transfer state estimator,IF-TF) 可以有效避免负迁移的产生,当源域数据质量较差时,该算法根据影响力值自动滤除该源域数据,提高算法的鲁棒性.
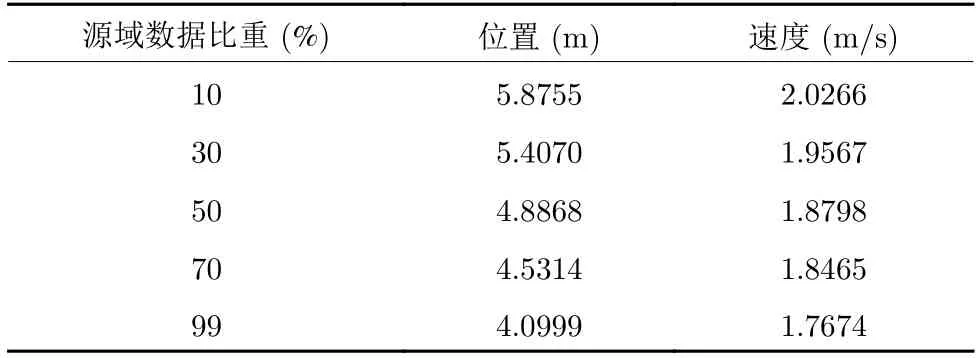
表1 不同数量的源域数据迁移后的 RMSEsTable 1 Average RMSEs (per sample) of IMM-TF in the presence of different amount source measurements
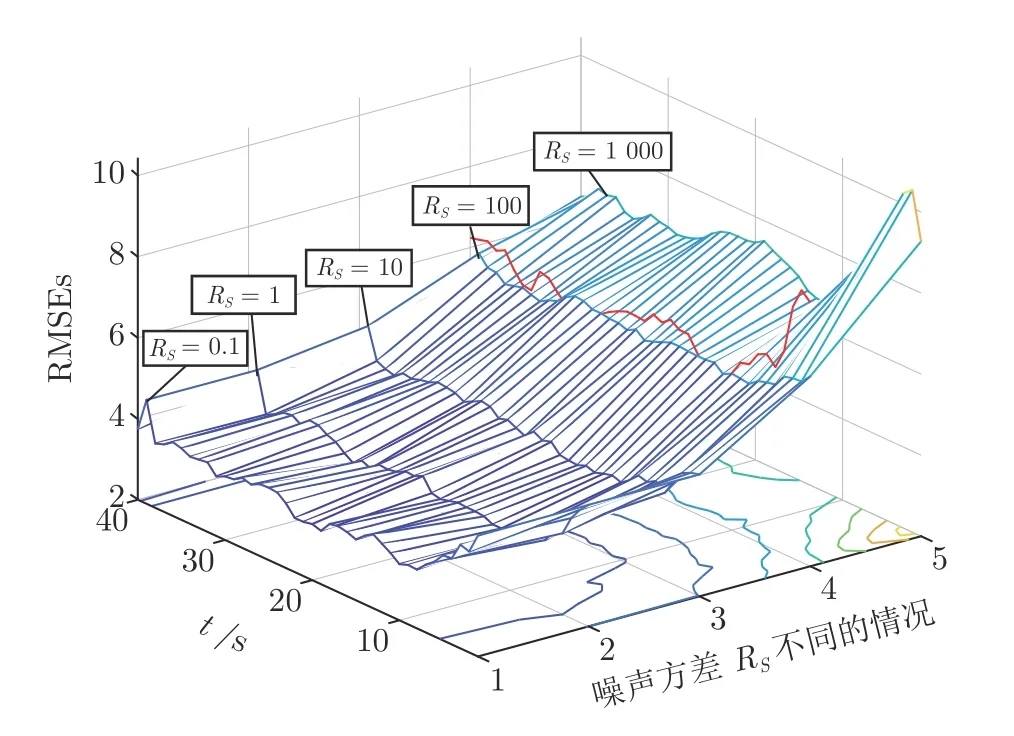
图5 源域数据质量对迁移估计器算法性能的影响Fig.5 Demonstration of the performance of IMM-TF in the presence of source measurements of different quality

图6 基于影响力值的迁移估计器算法性能Fig.6 Demonstration of the performance of IF-TF
4 结论
针对多率量测背景下跳变系统的状态估计问题,本文提出了一种迁移交互多模型估计算法,并利用平滑策略推导了知识迁移的形式,设计了迁移平滑估计器结构,实现了对辅助源域数据的有效利用.同时,通过构建源域量测数据与估计性能之间的解析关系,定量分析了源域量测数据的引入对估计性能的影响.仿真结果表明,本文所提出的迁移估计器IMM-TF 优于VSIMM、IMM和IMM-FU,同时避免了负迁移的产生.由于从源域到目标域的可迁移性和可迁移程度对估计性能起着重要的作用,因此在该框架下如何定义和设计可迁移程度仍然是开放问题.
附录A.推导式(9)
将式 ( 5)和式 ( 7) 代入式 ( 8) 得到

附录B.推导式(13)、式(14)


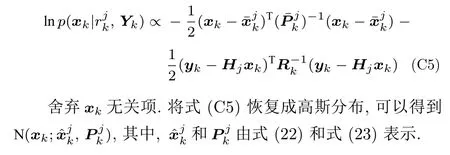
附录C.推导式(20)~式(23)

附录D.推导式(33)
根据影响力函数式 (30),进一步推导如下