基于涡旋光与平面波干涉的微位移测量
2022-09-17韩世泽杨栋胡晓宁杨忠明庄新港刘兆军
韩世泽,杨栋,胡晓宁,杨忠明*,庄新港,刘兆军
(1.山东大学 信息科学与工程学院,山东 青岛 266237;2.山东大学 激光与红外系统集成技术教育部重点实验室,山东 青岛 266237;3.中国电子科技集团公司第四十一研究所,山东 青岛 266555)
1 引言
涡旋光束是一种波前结构呈螺旋状、中心处光场复振幅为零且光强呈环形分布的新型光束。19世纪人们观测到光涡旋现象后,随激光技术及涡旋光理论的发展,人们不断对这种新型光束进行探 索。1994年,Allen等 基 于Hermite-Gauss光束制成Laguerre-Gaussian光束[1]。1995年,He等直接观察了角动量向吸收粒子的转移并形成具有相 位 奇 点 的激 光 束 的过 程[2]。2002年,Mac-Donald等研究了三维光阱结构的产生和操纵方法[3]。2005年,Shvedov等人利用介质楔产生了高阶光学涡旋[4]。2008年,Milne等利用一种可调谐流体锥形透镜,产生了涡旋光束[5]。2015年,Vaity等利用贝塞尔光束的傅里叶变换制备了完美的涡旋光[6]。2020年,Ding等基于低频外差干涉测量方法,利用CCD相机观测到涡旋光的相位分布[7]。2022年,本课题组提出了一种共形映射-空间相移干涉测量方法,测量和解调了拓扑荷为1,2,4和6的OAM模式螺旋波前,进一步推动了涡旋光的波前解调与应用[8]。
随着现代精密加工及检测精度要求的不断提高,精度已进入纳米量级,为满足现代测量需求,人们通过改良测量原理、光路设计和编码算法等不断提高测量系统的精度与分辨力[9]。涡旋光因具有角动量自由度,干涉图信息量较多,在干涉测量技术中的应用受到了越来越多的关注。2011年,Fujimoto等讨论了涡旋光束与多种光束在旋转及位移测量中的应用[10]。2017年,Olivier等基于共轭涡旋光干涉在理论上将高精度微位移测量推进到皮米级[11]。2019年,Yadav等利用共轭涡旋光设计了一种高精度干涉装置,测量精度达到皮米级[12]。同年,Sirenko等将太赫兹涡旋光束用做磁激励光谱探针,展示了涡旋光束在磁学探测中的优异表现[13]。2020年,Emile等研究了共轭涡旋光的旋转多普勒频移,讨论了共轭涡旋光干涉在物体旋转定位和检测的前景应用[14]。2014年,孙平等对涡旋光的干涉特性及它在测量变形物体离面位移的应用进行了系统研究[15]。2020年,赵冬娥等基于涡旋光与球面波干涉,采用计算切线角度的方法得到中心螺旋条纹旋转角度计算位移[16]。同年,夏豪杰等基于正负共轭涡旋光干涉,以质心定位判断干涉图的旋转角度并计算了位移[17]。2022年,Lu等基于共轭涡旋光干涉,通过拟合相位变化曲线得到图像旋转角度计算位移[18]。同年,本课题组提出了基于双波长光学涡旋的共相误差相移干涉测量方法,对共相误差中位移误差的测量精度达到约4.04 nm[19]。
为了进一步提高微位移测量精度,本文设计了一种基于涡旋光与平面波干涉的位移测量系统,建立并验证了花瓣状干涉图旋转角度与位移的线性关系。以改进的马赫-曾德干涉仪结构为基础,结合涡旋光束干涉光路,搭建了高分辨率精密位移测量系统。基于模型干涉图的特殊性质提出一种高精度数据处理方法,显著降低了测量误差与偶然性。对比实验结果表明,基于涡旋光与平面波干涉的微位移测量技术具有原理新颖、结构简单和测量准确等优点。
2 系统设计与仿真分析
2.1 系统设计
本文设计的测量方案是以涡旋光与平面波干涉模型为基础,平面波为测试光,涡旋光为参考光,将待测物体的位移变化转化为测试光的光程变化。由于两光束干涉产生的花瓣状干涉图在待测物体位移过程中产生旋转,根据建立的干涉图旋转角度与位移的线性关系,通过检测干涉图的旋转角度计算被测位移。光路设计如图1所示,器件参数见表1。He-Ne激光器出射光经BS1分束,平面参考光经SPP变为涡旋参考光射入BS2。平面测试光经BS3打在平面反射镜M后回射依次进入BS3,BS4,最终与参考光经BS2合束后干涉,成像在CMOS的光敏面上。位移台PECP承载平面反射镜M以作阶梯位移,由CMOS采集得到位移前后花瓣状干涉图。

图1 基于涡旋光与平面波干涉的微位移测量光学系统Fig.1 Optical system of micro-displacement measurement based on interference of vortex beams and plane wave
由于两光束的初始光强仅影响干涉图的对比度,为简化运算,令两光束的初始光强均为1。
平面测试光的电场强度EP为:

拓扑荷m=4的涡旋光作为参考光,可简写为:

其中:xv为光程,φv为涡旋光初相位。
两束光在BS2处干涉,此时CMOS相机上的干涉光强为:

当待测物体产生位移S=vt,其中v为平面反射镜的运动速度,t为平面反射镜的运动时间。由于光路往返,测试光的光程变化为二倍的平面反射镜位移,测试光光程变化为:ΔxP=2S,相位变化为Δφ,故CMOS相机上的干涉光强为:

取光强I最大时:

移项将位移量与旋转量分离,整理得到:2kS+kxP-kxv+(φP-φv)+Δφ=mθ。求 导得:

式(6)表明,干涉图旋转角度与微位移的变化量呈简单的线性关系,通过测量花瓣状干涉图的旋转角度可以计算出微位移量。激光波长为632.8 nm时,干涉图旋转1°对应的位移为3.52nm。
2.2 系统仿真与验证
为了验证2.1节提出的微位移测量系统模型,如图2所示,在Zemax光学设计与仿真软件中仿真了涡旋光与平面波干涉微位移测量系统。点光源出射的波长为633 nm的激光束经透镜准直为一束平面波,经BS1后分为两束。参考光通过SPP变为拓扑荷为4的涡旋光束进入BS2。测试光经BS3后,经反射镜M反射依次进入BS3,BS4,与参考光于BS2合束。

图2 微位移测量仿真光路Fig.2 Optical path simulation of micro-displacement measurement

图3 位移前后干涉图仿真结果Fig.3 Interference intensity before and after micro-displacement in simulation
最终探测器D采集到的花瓣状干涉图如图3所示。当平面反射镜M在x轴方向产生微小位移时,花瓣状干涉图发生旋转。
如图4(a)所示,干涉图的中心坐标为原点(0,0),另 取 任 意 一 点 坐 标P(x1,y1),由θ=计算该点与中心坐标连线与横轴的夹角,由计算采样点到中心坐标的距离。继续提取距离圆心距离为r的圆周区域,以rsinθ=acos(brcosθ+c)+d的 基 本 公 式 进 行余弦拟合,r为采样点到圆心的距离,θ为采样点到圆心连线与横轴的夹角。

图4 数据采集示意图Fig.4 Schematic diagram of data acquisition
如图4(b)所示,逐步改变提取区域到中心坐标的距离r,多次采样计算相位变化取均值计算位移量。
3 实验
3.1 实验系统与算法分析
为了验证本文提出的微位移测量模型及数据处理算法,搭建的实验验证系统如图6所示。该系统由光源及光源扩束系统、干涉测量系统和位移反馈反射镜构成。其中,干涉测量系统采用改进马赫-曾德干涉仪光路结构,包括分光镜、螺旋相位板以及CMOS相机等。以高精密压电纳米位移台承载平面反射镜作为位移发生装置,测量系统器件参数见表1。在测量实验中,波长为632.8 nm的激光光束经扩束后进入分光镜BS1,参考光依次经SPP,BS2。测试光经过BS3入射到位移系统中待测平面镜M上并反射,依次经BS3,BS4后进入BS2与参考光干涉。平面反射镜M位移为100.0 nm,步长为10.0 nm,由CMOS采集位移过程中的干涉图。

图5 数据处理流程Fig.5 Flow chart of data processing

表1 微位移测量系统的器件参数Tab.1 Components parameters of micro-displacement measurement system
数据处理流程如图5所示,首先根据参考光背景确定光束中心。如图7所示,通过对比度调节,边缘检测,联通区筛选等步骤以及图形中心计算得到涡旋光背景的中心坐标。
确定中心坐标后,在花瓣状干涉图中以中心坐标为圆心,提取距离圆心为r的圆周区域。改变r的大小多次提取图像信息,采用rsinθ=acos(brcosθ+c)+d进行余弦拟合。如图8所示,r为采样点到圆心的距离,θ为采样点与圆心连线与横轴夹角。
从拟合曲线中提取各自的相位数据,即可得到每一幅位移图像的像素曲线。通过采集位移前后图像的像素曲线,计算出相位变化的均值,即可得出旋转角度。根据已建立的旋转角度与位移变化的对应关系,可计算出实际位移。

图6 微位移测量实验装置Fig.6 Experimental devices for micro-displacement measurement

图7 光束中心坐标提取Fig.7 Extraction of beam center coordinate

图8 干涉图数据处理坐标示意图Fig.8 Schematic diagram of interferogram coordinate data processing

图9 实验采集的干涉图Fig.9 Interferogram collected in experiment

图10 位移数据曲线Fig.10 Curves of displacement data
实验结果如图9所示,平面反射镜位移后,花瓣状干涉图产生明显的旋转。实验采集到的花瓣状干涉图与仿真结果一致。数据处理结果如图10所示,拟合结果RMSE=0.150 2,拟合效果较好。由于光路往返,系统的实际位移应为200.0 nm。由图10(b)可知,平面反射镜以20.0nm步长进行位移,经计算位移量为196.3 nm,与实际位移相比误差为3.7 nm,误差百分比为1.9%。
设置位移为200.0 nm,每10次实验为一组,共计10组重复实验,结果如图11和表2所示。平均测量误差约为±2.9 nm,平均误差百分比为1.5%。实验误差主要受三个方面因素的影响:首先是环境因素,包括实验环境的温度、湿度、气压等参数变化引起的折射率与波长变化;其次是实验系统硬件,包括激光器频率漂移,输出光束的稳定性,压电位移台在启动、停止过程中的微振动,CMOS相机采样速率与分辨率,电子噪声以及系统光学元件的质量,如螺旋相位板的均匀性、分光镜的加工质量等;最后是系统优化及算法的有效实现程度,包括测量过程中干涉图中心定位的准确程度,数据采集结果的有效性,相位曲线拟合结果与实际采集数据的一致性等。
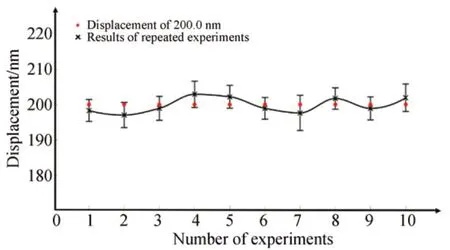
图11 重复实验结果Fig.11 Experimental results of repeated experiments

表2 重复实验结果Tab.2 Experimental results of repeated experiments(nm)
如图12(a)所示,在测量连续微位移时,采集到的相位数据出现包裹相位,位移曲线出现相位包裹现象。若在一个连续的相位区间末端检测到相位大幅度变化(与相位包裹区间相当),将处于新相位区间的部分整体提高一个包裹区间,得到连续无包裹相位的实验数据曲线。解包裹后的相位变化曲线如图12(b)所示。

图12 相位变化曲线Fig.12 Curves of phase changing
控制位移台进行不同行程的位移测量,实验结果如图13和表3所示。

图13 不同位移的测量结果Fig.13 Measurement results of different displacements

表3 不同位移的测量结果Tab.3 Measurement results of different displacements(nm)
改变涡旋光拓扑荷进行位移测量(100.0,200.0,300.0,400.0,500.0 nm),实验结果如图14所示。选用拓扑荷过大的涡旋光,其干涉图中花瓣状亮斑数量多、体积小,延伸的叶状干涉图排布过于密集。虽然相位拟合过程中可提取的波峰组数多,但每组波峰可供提取的像素点较少,拟合较为困难,测量精度较低。选用拓扑荷过小的涡旋光,花瓣状亮斑数量过少,虽然每组波峰可供提取的像素点较多,但可提取的波峰组数较少,拟合结果偶然性大。选用拓扑荷为4的涡旋光,测量精度最高。

图14 不同拓扑荷的涡旋光实验测量结果Fig.14 Measurement results of vortex beams with different topological charges
3.2 对比实验
为了验证本文提出的涡旋光与平面波干涉微位移测量方法的优越性,将本测量系统与共轭涡旋光干涉[18]、基于涡旋光与球面波干涉[16]等方法进行对比实验。搭建了涡旋光与平面波干涉、涡旋光与球面波干涉、涡旋光与共轭涡旋光干涉3组实验。如图15(a)所示,在涡旋光与平面波干涉实验中,采集方法为对花瓣状干涉图进行多次圆周采样并拟合得出相位变化均值、旋转角度。如图15(b)所示,在涡旋光与共轭涡旋光干涉实验中,采集方法为对小花瓣状干涉图进行一次圆周采样拟合相位。如图15(c)所示,在涡旋光与球面波干涉实验中,采集方法为拟合位移螺旋条纹的中心切线计算角度变化。
涡旋光与平面波干涉方法的花瓣状干涉图从暗核附近的4个花瓣状亮斑开始,呈叶状向外延伸,特征点更多;一次采样即可提取4组波峰进行计算,对图片的边缘质量要求不高,可供采样区域多,便于实现多次采样重复计算,计算结果更加精确。相比之下,共轭涡旋光干涉图的主要特征区域集中在暗核结构附近的花瓣状亮斑,位移增大,干涉图中心暗核面积增大,花瓣状亮斑排布过于密集,圆周采样时明暗条纹较窄,可采集的数据量少,拟合较为困难,图像分辨率要求较高。涡旋光与球面波干涉图需要精确提取中心螺旋条纹的切线角度,对中心螺旋条纹边缘的图像质量要求高,当干涉图分辨率较低时,测量误差较大,且在连续实时测量中难以精确提取,可供采样的条纹区域较模糊,多次采样的实现难度较大。共进行5组对比实验,结果见表4。

图15 三种干涉图及数据处理方法对比Fig.15 Comparison of three interferograms and calculation methods

表4 三种测量方式结果对比Tab.4 Comparison of results of three measurement methods
4 结论
本文基于涡旋光与平面波的干涉模型,研究了干涉图变化与位移变化的对应关系,建立并验证了花瓣状干涉图旋转角度与位移的线性关系,提出了一种微位移测量方法。搭建了位移实验系统,测量实验得到的计算位移量为196.3 nm,与系统实际位移200.0 nm相比,误差为3.7 nm。与球面波干涉和共轭涡旋光干涉的对比实验表明,基于涡旋光与平面波的干涉测量方法在测量精度及可靠性方面具有显著的优势。基于涡旋光与平面波干涉的微位移测量方法是一种高精度、高灵敏度、更为简单实用的测量方法。
