基于PLC的智能洗浴机器人控制系统设计
2022-07-06崔丹丹王海龙
曾 艳, 崔丹丹,戴 琨, 王海龙
(唐山工业职业技术学院,河北 唐山 063299)
0 引言
据统计,至 2050 年,中国老年人口将会达到全国总人口的30%以上。随着老年人数量不断增长,越来越多的老人需要照顾,但由于社会压力,子女无法实时陪伴。随着科技进步,国家提出了一系列“智慧养老”政策,提出了很多方案,并开发出很多辅助老年人生活的产品。经调查,多数老年人生活中遇到的较大困难为洗澡难,及多数意外伤害也发生在洗澡过程中,市场上虽然老年助浴产品比例在不断增高,但远远不能达到所需[1]。最早研究助浴产品的国家为日本,1970年就设计出了全自动超声波的洗澡机。经过不断地迭代更新,2015年日本推出了自动洗澡机,可实现自动清洗、自动汗蒸、自动清洁和消毒[2]。之后,Kim 等人设计出跷跷板浴缸[3],主要助力于残疾人洗浴。松下、海尔等公司也相继设计出淋浴产品。2017年,美国一家公司推出了多功能的“步入式”浴缸。在国内,也有大量学者对此方面展开研究,其中陈军华等人在2014年研制了一种自动搓背机器人系统[4]。之后,尚振东等人采用弹性钢板和粘贴应变式力传感器设计了一种自动搓背装置[5]。2017年,辅助沐浴移动床[6]被设计出,随后,老人沐浴椅也被推出[7],以防止老人洗浴过程意外摔倒。2021年,杜露露等人推出一款老人智能洗浴装置原型[8],理论上可实现全身清洗。由此可见,国内出现的很多款主流洗浴设备大多数都结构简单,不智能,而国外较多产品又非常昂贵,大多数改变了传统的洗浴方式,因此,亟待开发一种老人智能洗浴设备,使其更智能、更舒适,成本更低。
基于此,项目团队近两年一直致力于智能洗浴机器人的研究,旨在解决老人洗浴中的3个难题:1)自主搓洗的困难;2)水流调节不便的问题;3)易滑倒、摔伤的安全问题。设计了智能洗浴机器人[9]的机械结构、水路和水电分离、安全防护部分,在此基础上,本文重点对智能洗浴机器人的电气控制系统进行研究并设计,使其能够实现自动开启、自动搓洗、自动喷水、智能按摩的功能,满足老年人的需求。
1 控制系统设计
1.1 设备功能分析
本项目团队所开发的智能洗浴机器人可支持站姿和坐姿洗浴,整体外观模型图和水路设计如图1和图2所示。根据市场需求确定设备的所需功能为:1)可初始化,可自动检测人体位置,整个搓洗过程可模拟人体真实洗澡过程;2)搓澡仪可上下移动1.6 m,具有反复移动功能,满足全身清洗,移动速度可调节;3)搓澡仪可自动识别并调整搓洗角度,可适应人体凹凸不平曲线;4)设备可实现自动喷水和喷沐浴液;5)设备具有断电保护功能,并具有安全可靠的防水、防潮措施,保证安全洗浴。

图1 外观模型图

图2 水路设计图
1.2 设计思路
根据产品机械结构及所需功能,可将整个电气控制系统分为4个部分:启停控制、水路控制、搓澡仪角度控制、搓澡仪移动控制。考虑到现场使用信号抗干扰的问题,本系统采用可编程控制器(Programmable Logic Controller,PLC)作为控制核心。各部分的设计思路如下。
1)启停控制。在启动控制中,将搓澡仪上部安装一对漫反射传感器,当人在指定位置时,按下启动按钮,搓澡仪自动上升,检测到人体肩部后停止运行。停止时,搓澡仪角度复原,回到系统定义原点。
2)水路控制。在水路控制中,设备背面通过3个电磁阀和三通的巧妙设计变“一进水”为“四出水”,当总控电磁阀和控水电磁阀工作时,水从入水口进入1号喷水花洒和2号喷水花洒。当总控电磁阀和控沐浴液电磁阀工作时,则水经过沐浴液箱进入1号喷沐浴露花洒和1号喷沐浴露花洒。
3)搓澡仪角度控制。搓澡仪旁边安装有2对对射传感器,4个角点位置安装有电动推杆,可实时检查人体曲线,根据检测人体曲线可控制上面和下面的电动推杆伸出的距离,从而可使搓澡仪与人体紧密贴合。
4)搓澡仪移动控制。该设备机械设计中采用丝杠螺母运动副实现竖直移动,电气控制中使用步进电机控制丝杠运动,从而带动搓澡仪进行上下移动。
2 硬件的选型
1)电机选型。通过与不同类型电机对比,最终从动力和转矩以及成本上,选择了86EBP111轴径14 mm的 DC60 V步进电机。电机与传动机构采用轴连接方式,具有能耗低、震动小、噪音小的特点。
2)传感器。本设计选用2对通用PNP常开型对射光电传感器(DC6~36 V),以满足人体背部曲线检测需要;选用2个NPN常开型的接近开关,以满足上下限位检测需要;选用1对可任意调整NPN型红外传感器,以满足人体肩部检测需要。
3)电磁阀。通过分析水路压力及喷水路、喷沐浴液路互相配合的问题,对水路部分进行“三通三阀”设计,并选择DC24 V 常开式(通电关闭、断电打开)DN10(内径15 mm)电磁阀进行控制。
4)电动推杆。根据设备运行过程的推出距离,本 设 计 选 用 4 个 DC12 V 、推力60 N、推程50 mm、长度142 mm、防水等级IP65级的电动推杆。将4个电动推杆设定在矩形的4个角点位置,以实现搓澡仪推力及推程大、噪音小、防水等级高、效率高等特点。
3 硬件设计
3.1 系统I/O分配
根据上述设备功能和具体硬件选型,确定系统的输入、输出如表1所示。输入信号共8个,输出信号为10个,因此,所用CPU的型号为CPU1215C,电源类型为DC/DC/DC。
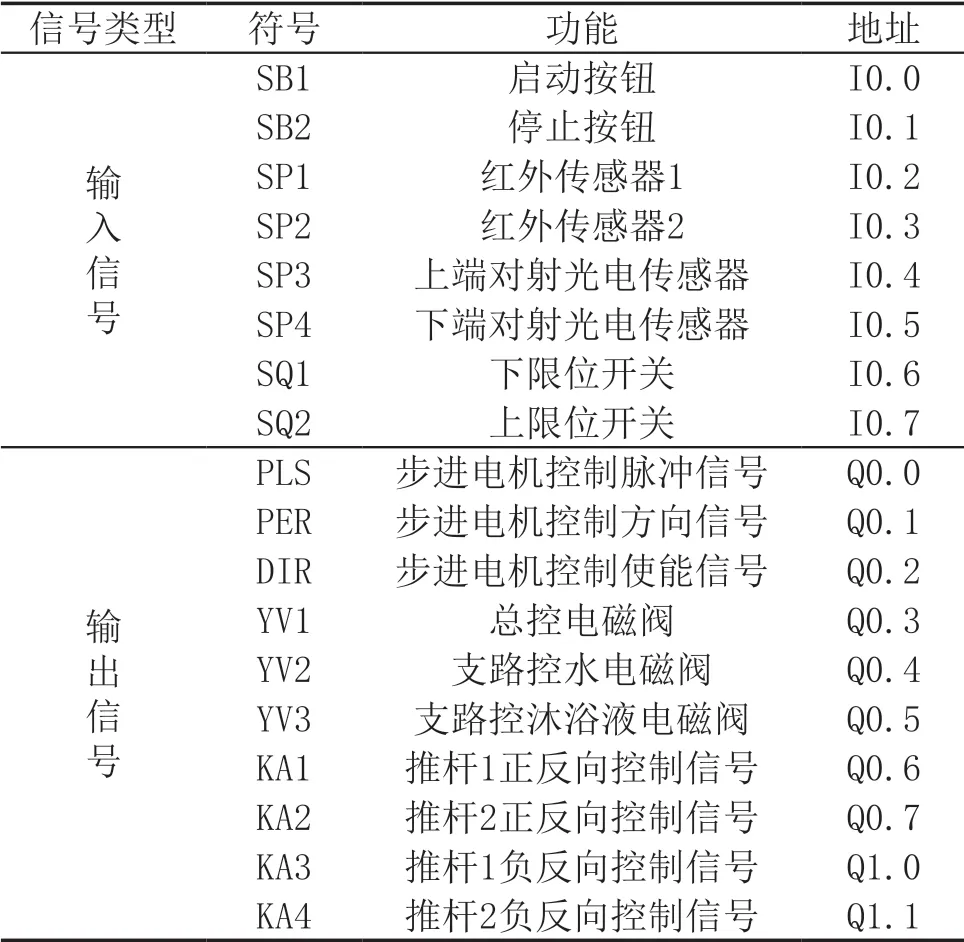
表1 系统I/O分配表
3.2 系统硬件结构图
所设计的控制系统主要包括启停控制、水路控制、搓澡仪角度控制、搓澡仪移动控制,各部分控制中信号流向如图3所示。

图3 系统硬件结构图
4 软件设计
根据控制要求,本设备实现一次自动清洗的流程为:启动程序上电自动复位,等待传感器检测人体后进行启动。按下启动按钮,设记录人体曲线轨迹,通过红外传感器自动找到肩部位置,开始清洗。先喷水2 min,之后在洗澡过程中每隔5 s喷水3 s,搓澡仪在丝杠螺母运动副的带动下,重复着“下降50 mm,停留0.5 s,上升40 mm,停留0.5 s”的循环过程,期间,如果遇到身体曲线变化,上下两对对射式光电传感器信号发生变化,从而控制上面和下面的电动推杆伸出不同距离,使搓澡仪与人体紧密贴合,搓洗完毕后,搓澡仪返回到肩部位置,同时喷洒沐浴液20 s,搓澡仪再重复上述过程,最后喷水30 s,洗澡结束。系统控制程序采用LAD语言编写,程序框架为一个主程序和一个搓澡仪角度调整的子程序,各部分程序的具体流程如图4和图5所示。

图4 主流程图
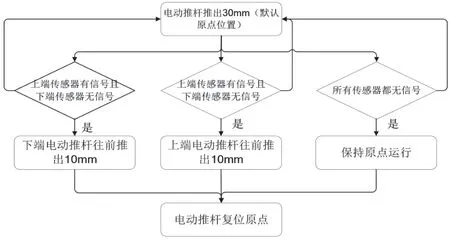
图5 搓澡仪搓洗流程图
5 结论与讨论
本项目团队在已开发智能洗浴机器人机械结构基础上对设备的电气控制系统进行了设计,通过对设备的软硬件设计、软硬件模拟调试及设备的综合调试,所设计的控制系统基本可完成所要求的自动喷水、模拟搓洗等功能,可实现了设备的智能化运行,为“智慧养老”服务。但是,在该设备的控制系统中,安全防护设计需进一步改善,即不仅仅在机械结构上实现水电隔离,以及只做短路保护、漏电保护等措施,在运行过程中需专门开发电气保护的措施。
