一种基于R-函数的自适应线搜索信赖域算法
2021-09-12李德华芮绍平
李德华,芮绍平
(淮北师范大学 数学科学学院,安徽 淮北235000)
0 引言
信赖域方法最早由Powell[1]提出,具有较为理想的全局收敛性和稳定性.传统信赖域算法通常利用二次模型连续逼近目标函数,以期获得理想最优值.算法构建信赖域子问题

确定迭代步dk.其中:gk=∇f(xk);Bk为Hesse矩阵∇2f(xk)的近似;Δk为信赖域半径;‖‖·是Euclidean范数.
信赖域方法就是通过这一比值ρk来衡量二次模型与目标函数的拟合程度.若ρk趋近于1,则表明目标函数的实际降幅与估计降幅接近,当前迭代效果好,需要考虑扩大下次迭代的信赖域半径;若ρk的值趋近于0或者小于0,表明迭代效果较差,试探步不可接受,需要缩小下次迭代的信赖域半径.
传统的信赖域方法根据比值ρk的大小放缩信任区域半径Δk,一般是原信任区域半径Δk常数倍增减,很大程度上依赖以往的经验来确定.为了克服这种缺陷,学者们引入自适应技术.Sartenaer[2]构造一类自动确定初始信赖域半径的ITTR算法.Zhang[3]等借鉴这一思想,把这种自适应策略应用到整个信赖域半径更新规则上.Hei[4]提出当前迭代的信赖域半径是关于比值ρk的R-函数与搜索步长‖ ‖dk-1的乘积.文献[3]给出信赖域半径的更新与Bk的关系.为了避免在每次迭代过程中计算矩阵Bk的逆,李改弟[5]提出新的信赖域半径更新规则,即,这里yk-1=gk-gk-1.在此基础上,文献[6-12]提出一些改进的自适应信赖域算法.
本文在基于李改弟[5]和Hei[4]的信赖域半径自动更新策略的基础上,把两者的更新策略结合起来,基于R-函数得到一个改进的信赖域半径自动更新策略.具体行文如下,在第2部分给出新算法,在第3部分证明新算法的收敛性,最后通过数据实验验证算法的稳定性与有效性.
1 算法
本节中,借助于R-函数,给出一个新的信赖域半径自动更新策略,并设计新算法.R-函数定义如下[4]:
定义1Rλ(t)定义在(-∞,+∞)上,参数λ∈(0,1),C是一个常数集,R-函数Rλ(t)满足以下条件:
①Rλ(t)在(-∞,+∞)上是非减的;
③Rλ(t)≤1-r1(∀t∈λ,r1∈( 0,1-ζ)且r1∈C);
④Rλ(λ)≤1+r2(r2∈( 0,+∞)且r2∈C);
显然上述R-函数Rλ(t)(λ∈(0,1))满足:
(i)0<ζ≤Rλ(t)≤1-r1<1,∀t∈(-∞,λ);
(ii)1<1+r2≤Rλ(t)≤M<+∞,∀t∈[λ,+∞).
基于李[5]和Hei[4]的信赖域半径自动更新策略,本文提出一个改进的信赖域半径更新规则如下:

其中Rλ(ρk)是一个关于比值ρk的R-函数.新策略把Rλ(ρk)作为调节信赖域半径的依据,使得信赖域半径的变化取决于自身,基于此更新策略,设计算法1.
算法1(自适应线搜索信赖域算法)
步聚0取初始点x0∈Rn,对称阵B0∈Rn×Rn,ε>0,0<u<1,Δ0=‖g0‖,0<ζ<1,0<r1<1-ζ,r2>0,M>1+r2,k:=0.
步骤1如果‖gk‖≤ε,则停止.否则转步聚2.
步骤2求解子问题(1)得到dk.
步骤3计算ρk的值.若ρk≥u,则令xk+1=xk+dk;否则求αk,使其满足Armijo准则,令xk+1=xk+αkdk,转步聚4.
步骤5更新矩阵Bk到Bk+1,令k:=k+1,转步聚1.
2 算法的收敛性分析
为证明算法收敛性,本文所需假设条件A如下:
(i)水平集L(x0)={x∈Rn|f(x)≤f(x0)}有界.
(ii)序列{Bk}一致有界,即∃M1>0使得∀k有‖Bk‖≤M1.
引理1若当前迭代点xk是由算法1生成的,那么其中Mk=‖Bk‖
证明根据算法1步骤4所定义的信赖域半径,当前Δk满足关系式因此,根据是式(1)的一个可行解,则

引理得证.
引理2[13]若试探步dk是子问题(1)的解,则有

定理1若假设A成立,算法1有限终止或迭代点列{xk}满足

证明由假设(i)可知,序列有下界.用反证法,假设定理1不成立.故存在εˉ>0和一个无限子列满足.定义集合
根据引理1和算法1步骤3有

根据假设条件A可知,对任意的ki,一定存在M1>0,使得Mki≤M1,且{f(xk)}有下界.故由式(5)可得到

也就是说,当ki(∈G)→+∞时,有为了不失一般性,假设对所有的ki∈G,都有着其中pki是前一次迭代到当前可接受的迭代间信赖域子问题计算的次数,所以对ζ都满足依据ζ的定义对应于下面的信赖域子问题不能接受


另一方面,根据引理2有

利用G的定义、假设A(ii)以及{f(xk)}单调递减有下界,可以得到Δki→0(ki∈G).又

因此,对于充分大的ki∈G,

令ki→∞,有,这与式(7)矛盾.故假设错误,定理成立.
3 数据结果
本节给出算法1的数值实验,并和传统的牛顿型信赖域算法进行比较.为行文方便,把新算法和传统的信赖域算法分别记为ALG1和NTTR.ALG1中所取的R-函数为

其中参数取值为:γ1=γ2=0.01,ζ=0.1,u=0.25,M=5.两种算法都取相同初始信赖域半径Δ0=1,精度为ε=10-6.两种算法中测试函数均来自于文献[14].

算法在Matlab9.0中编程实现,实验数据如下表:
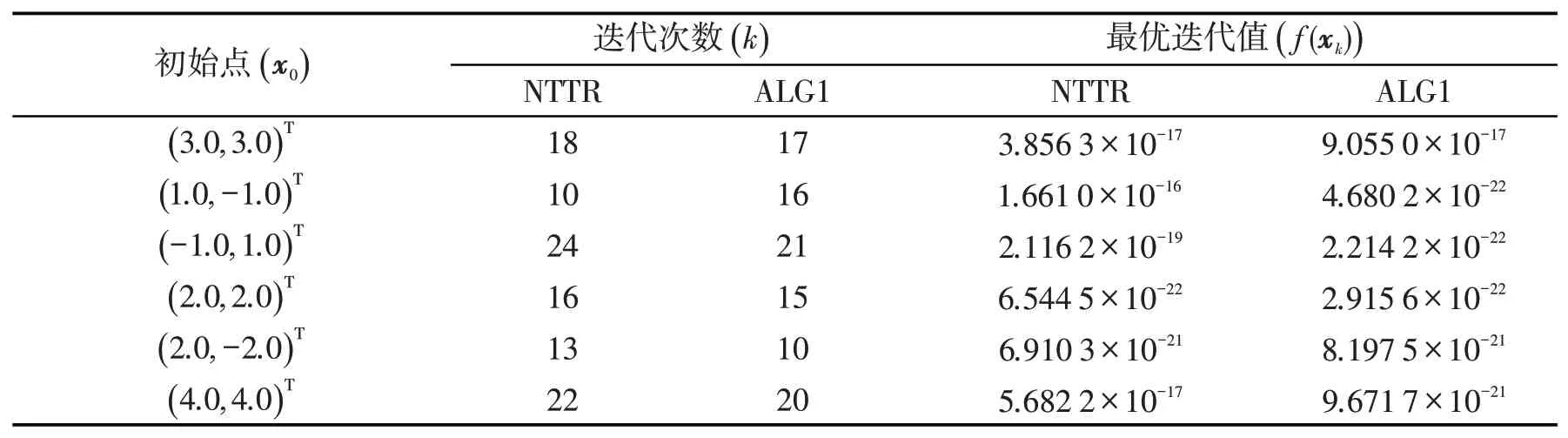
表1 数值结果
从数值结果可以看出,对于相同的初始点,算法1所需迭代次数比传统算法小,目标函数值下降的快,这表明算法1稳定有效.
