100%低地板有轨电车牵引工况下轮对导向性能研究
2021-08-28高常君王云鹏
高常君,李 华,王云鹏
(中车青岛四方车辆研究所有限公司 技术中心,山东 青岛 266031)
随着有轨电车的不断发展,形成了多种多样的有轨电车结构。美国运输研究委员会根据有轨电车转向架结构对有轨电车进行了分类,形成了近二十个系列的有轨电车类型[1]。转向架结构的改变必然带来车辆动力学性能的变化,国内外学者对各种结构形式的有轨电车进行了大量的研究[2-5]。本文将针对配装纵向耦合独立旋转车轮转向架的有轨电车,探讨其在牵引工况下动车轮对的直线对中性能。
1 纵向耦合独立旋转车轮转向架的导向机理
图1为纵向耦合独立旋转车轮转向架的一种典型结构。外侧吊挂的电动机齿轮箱结构把同侧前后车轮耦合起来,使其具有相同的转速。左右车轮之间通过曲轴连接构成轮对,具有传统轮对的作用特点,左右车轮可以同时横向偏移和摇头,但又与传统轮对不同,左右车轮因分别受到左右电动机的驱动作用,完全独立旋转,根据控制策略,旋转速度可以不同。

图1 带曲轴的纵向耦合独立旋转车轮转向架
图2为纵向耦合独立旋转车轮转向架在线路上运行时轮对1和轮对2所处的任意位置。
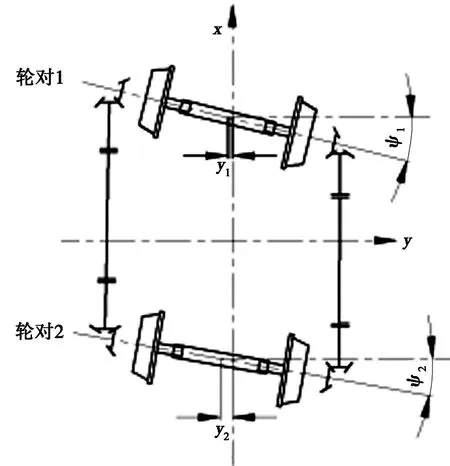
图2 纵向耦合独立旋转车轮转向架轮对的位置
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
纵向耦合独立旋转车轮转向架由于同侧前后车轮相耦合,前后轮对不同的横移量和摇头角导致耦合侧前后车轮轮轨接触点位置不同,即产生轮轨接触点滚动圆半径差,从而产生纵向、横向蠕滑力,使转向架具有了导向能力。由式(1)~式(8)可知:
(1) 若1、2位轮对的横移量不同或者摇头角速度不同,则车轮在轮轨接触点处就会产生纵向蠕滑力。
(2) 由曲轴相连接左右独立旋转车轮,则同传统轮对一样,只要存在横移量或摇头角,左右车轮在轮轨接触点处就会产生横向蠕滑力,并且左右车轮的横向蠕滑力大小相等,方向相同。
(3) 若1、2位轮对的横移量和摇头角速度相同,则车轮在轮轨接触点处便没有纵向蠕滑力。
2 纵向耦合独立旋转车轮有轨电车牵引工况下的导向性能
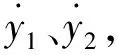
某项目有轨电车的编组如图3所示,由2个车组构成,每个车组由一动车和一拖车构成,其中动车为头车,动车转向架为带曲轴的纵向耦合独立旋转车轮转向架,拖车转向架与动车转向架主结构一致,取消了电动机和齿轮箱,即取消了纵向耦合作用。因列车头尾对称,故取其中的1个车组为研究对象,建立如图4所示的纵向耦合独立旋转车轮有轨电车动力学模型,计算不同牵引工况下有轨电车在线路上运行时轮对的对中性。

图3 某项目有轨电车的编组
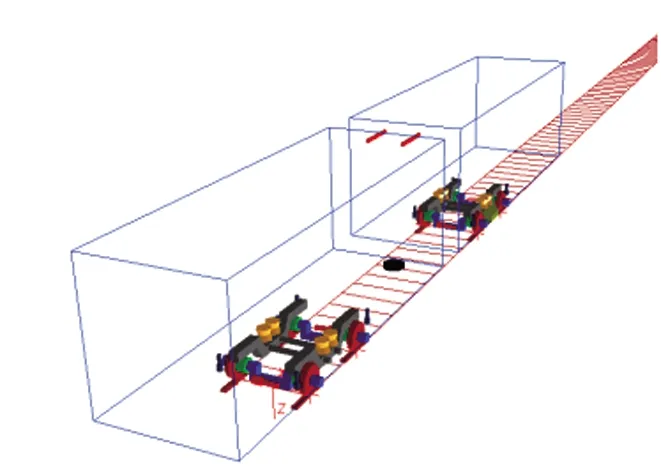
图4 100%低地板有轨电车动力学模型(一动一拖)
2.1 左右车轮标称牵引扭矩作用下的轮对对中性计算
动车转向架各车轮输入标称牵引扭矩,如图5所示,有轨电车从初速度1 km/h开始启动,运行速度如图6所示。动车2条轮对横移量随牵引扭矩的变化而变化,见图7。牵引加速阶段,轮对向一侧偏移;牵引力切除阶段,轮对恢复到线路中心并围绕线路中心线左右振荡;之后施加反向牵引扭矩,轮对向线路另一侧偏移。由此可见,在标称牵引扭矩作用下,轮对具有对中性。
图5 动车车轮施加的标称牵引扭矩曲线
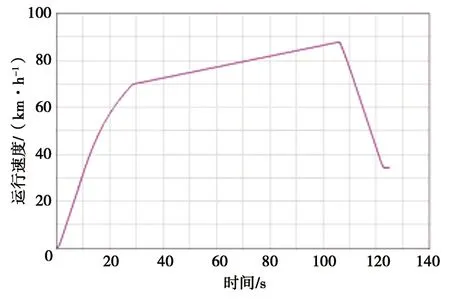
图6 有轨电车运行速度曲线
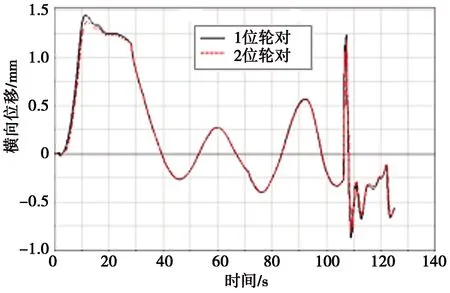
图7 动车转向架轮对横移量
2.2 左右车轮牵引扭矩有偏差情况下的对中性计算
有轨电车牵引运行过程中,左右电动机输出的牵引扭矩会存在一定的偏差。特殊情况下,一侧的牵引扭矩在整个牵引过程中始终大于另一侧的牵引扭矩。考虑带偏差的左右牵引扭矩如图8所示,有轨电车从初速度1 km/h牵引启动,动车轮对随牵引扭矩的加载向一侧横移,如图9所示。在降功区牵引扭矩降低,轮对慢慢向中心位置偏移,牵引扭矩切除时轮对没有回到对中位置,之后的整个牵引扭矩切除时间段内,轮对以略大于1 mm的横移位置为中心左右振荡,也没有恢复到对中位置。反向施加牵引扭矩,轮对越过对中位置向另一侧横移。即整个牵引过程中,轮对失去了对中性。
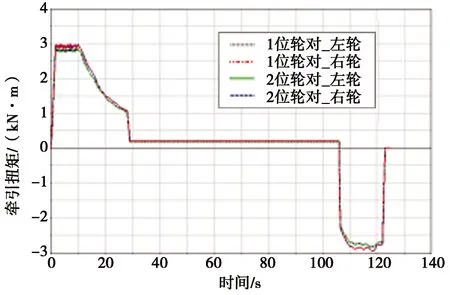
图8 动车左右车轮施加的牵引扭矩(有偏差)
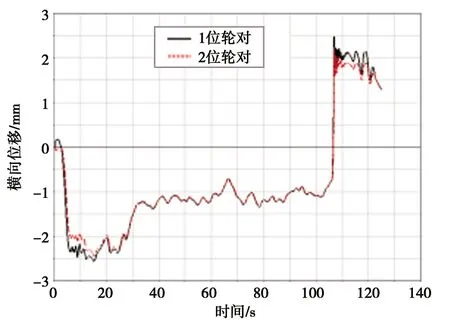
图9 动车转向架轮对横移量(有偏差)
动车轮对的纵向、横向蠕滑力如图10、图11所示,摇头角如图12所示。在牵引扭矩切除后,轮对横移量不大,几乎没有摇头角,故纵向、横向蠕滑力很小且相对稳定,轮对左右横向蠕滑力的和很小,横向蠕滑力和重力复原力不足以使轮对恢复到对中位置。可见,在动车轮对横移量和摇头角较小的情况下,纵向耦合独立旋转车轮转向架的导向能力不足。
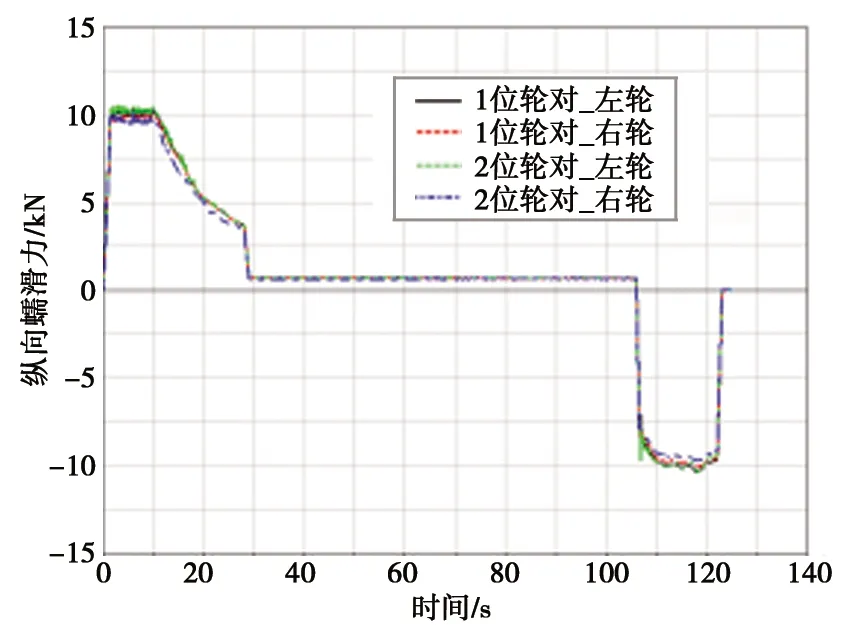
图10 动车各车轮纵向蠕滑力
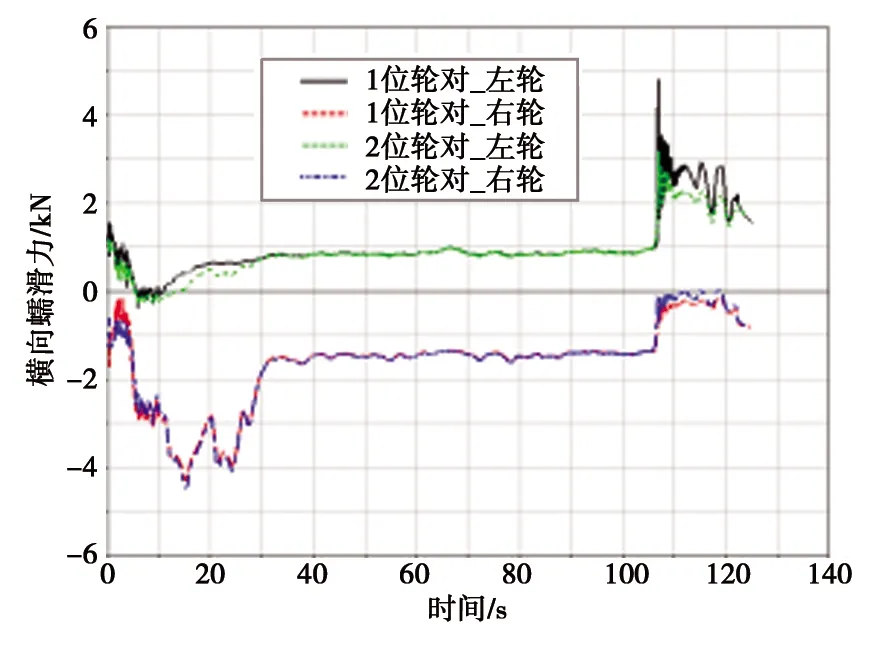
图11 动车各车轮横向蠕滑力
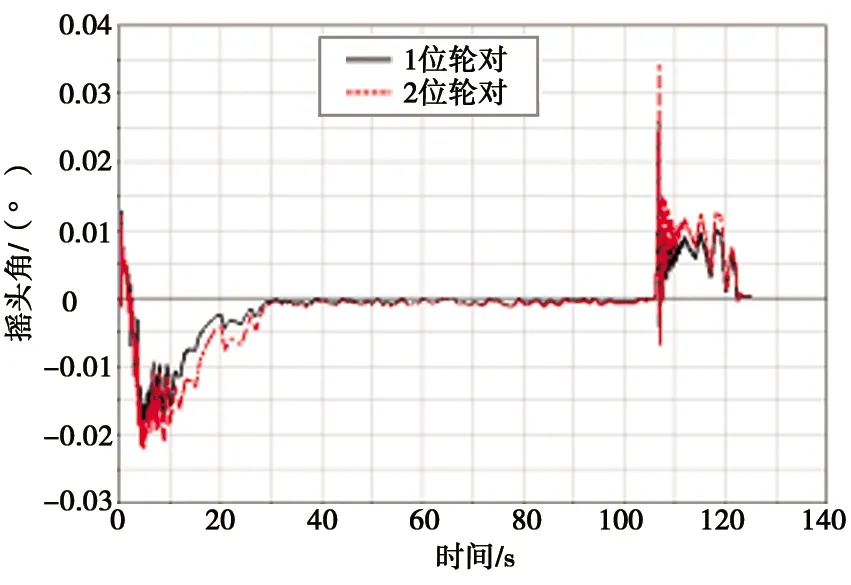
图12 动车转向架轮对摇头角
2.3 轮径差导致牵引扭矩偏差作用下的对中性计算
众所周知,转向架各车轮在制造或者运营磨耗后不可避免地存在轮径差,此时给定标称牵引力,输出牵引扭矩也会不同。考虑图13所示的牵引扭矩,取左右车轮轮径差为3 mm,有轨电车在直线上从1 km/h初速度牵引启动,动车轮对的横移量如图14所示。可以看出,在牵引扭矩切除后,动车轮对的横移量维持在2 mm左右,没有恢复到中心位置,轮对失去对中性。同样,在牵引扭矩切除后,轮对也无法恢复到对中位置,与2.2节结果类似。

图13 轮径差3 mm时牵引启动过程中 动车各车轮施加的牵引扭矩
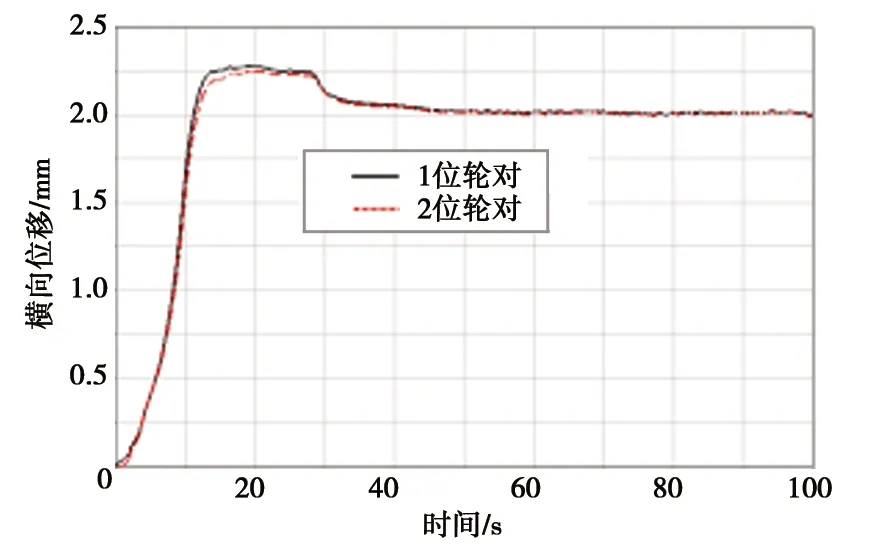
图14 轮径差3 mm时牵引启动过程中动车轮对横移量
图15为左右车轮轮径差1 mm时牵引启动过程中动车轮对的横移量。可以看出,牵引扭矩切除后,轮对横移量维持在0.9 mm左右,同样没有恢复到对中位置,但相比轮径差3 mm条件下的轮对横移量减小了一半。故从保证轮对的对中性而言,纵向耦合独立旋转车轮转向架应控制左右车轮的轮径差。
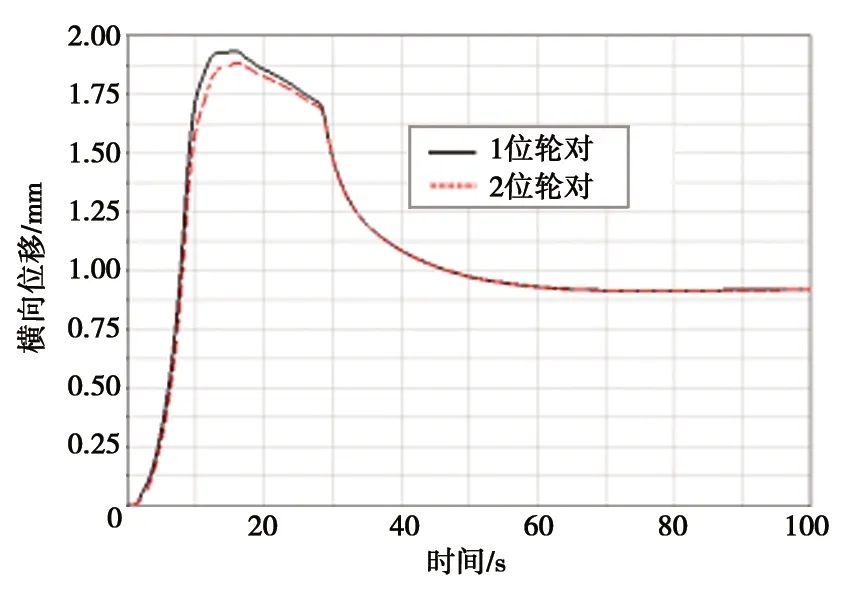
图15 轮径差1 mm时牵引启动过程中动车轮对横移量
2.4 实际牵引扭矩作用下直线运行时的对中性计算
有轨电车运行过程中动车转向架左右车轮实际的牵引扭矩呈振荡变化状态,如图16所示。图17给出了该牵引扭矩作用下,有轨电车牵引启动运行时动车轮对的横移量计算结果。可以看出,轮对在轨道中心位置左右振荡,轮对具有对中性。分别考虑动车转向架轮对左右车轮存在3 mm、1 mm的轮径差,牵引启动过程中,在电动机实际牵引扭矩驱动下,牵引扭矩切除后,轮径差为3 mm的有轨电车动车轮对横移量在2 mm处左右振荡,失去了对中性;而轮径差为1 mm的有轨电车,动车轮对在轨道中心位置左右振荡,具有对中性。动车轮对的轮径差对轮对的对中性影响很大,为保证轮对的对中性,应控制左右车轮的轮径差。
2.5 实际牵引扭矩作用下曲线通过时的对中性计算
对有轨电车以10 km/h速度通过R25 m小曲线之后在直线上牵引加速的运行工况进行仿真计算。车轮直径取标称轮径。有轨电车通过曲线后牵引加速运行,运行速度-时间历程图见图18。通过曲线后施加的牵引扭矩同图16。由计算结果可知,在通过曲线后牵引加速阶段,动车车体及轮对振荡后在横移量1.5 mm左右的位置小幅振荡,而拖车轮对和车体在通过曲线后的偏移量约为4 mm。该计算工况下,动车轮对、拖车轮对均失去对中性。
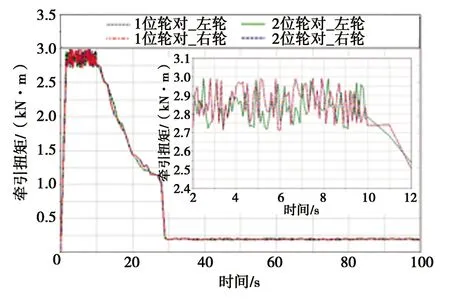
图16 实际运行时动车各车轮施加的牵引扭矩
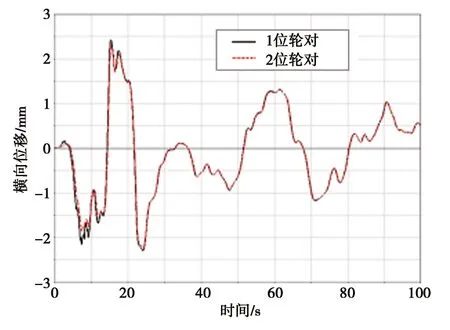
图17 实际运行时动车轮对横移量
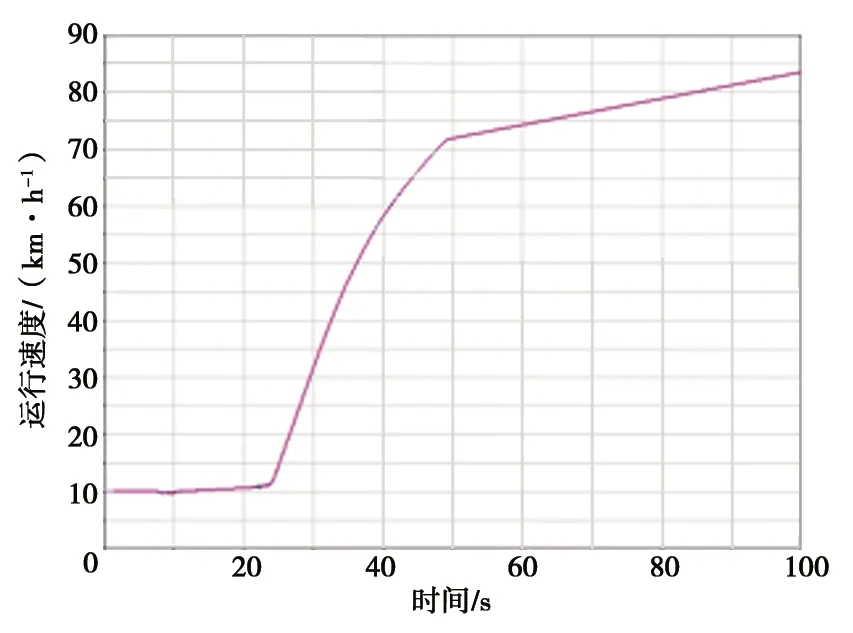
图18 曲线区段有轨电车的运行速度-时间历程
去掉拖车,仅对单节动车通过R25 m小曲线的性能进行计算,计算中牵引扭矩减半。由计算结果可知,动车轮对、车体在通过曲线后牵引加速过程中,振荡恢复到轨道的中心位置。该计算条件下,动车轮对具有对中性。
上述结果的差异性是拖车轮对、车体等的不对中性通过动车、拖车之间的上下铰接致使动车轮对、车体不对中。拖车轮对没有纵向耦合作用,左右车轮转速可以不同,没有纵向蠕滑力,不能产生摇头,也就不能产生横向蠕滑力,仅靠重力复原力横向复位。在轮对横移量不是很大时,复位能力很弱,故拖车轮对通过曲线后失去对中性,连带动车轮对也失去了对中性。即有轨电车运行过程中,动车轮对的对中性与拖车有关,与有轨电车的车辆结构配置有关。
3 结论及建议
有轨电车采用独立旋转车轮实现低地板结构的同时带来了不同于传统轮对的动力学问题,即轮对的导向问题。从本文的分析可以得出如下结论:
(1) 有轨电车动车轮对的对中性受多种因素影响,如牵引扭矩、轮径差、有轨电车结构配置等。
(2) 在轮对小的横移量和摇头角的情况下,纵向耦合独立旋转车轮转向架的导向能力不足。
(3) 从保证动车轮对对中性的角度而言,应控制动车转向架左右侧电动机输出牵引扭矩的偏差、车轮制造及运营过程中的轮径差。
国外也报道过拖车转向架运营中出现的问题,比如Trevor Griffin研究团队在研究报告中曾论及中间拖车独立旋转车轮转向架过大的轮轨磨耗、噪声以及脱轨问题[6],这与轮对导向问题紧密关联。建议100%低地板有轨电车在运营过程中要关注拖车转向架的性能,或者采取一定的措施改善拖车的运营性能,从而改善整列有轨电车的对中性能。
