直升机多源信息融合仿真系统设计
2021-07-21强静雅
王 琳 强静雅 黄 海
(陆军航空兵学院陆军航空兵研究所 北京 101121)
0 引言
武装直升机是低空超低空战场上重要的突击力量,主要用于对地面装甲、轻装甲、步兵战车目标以及低空范围内直升机、无人机目标实施攻击。获取精确一致的目标信息是实施火力打击的前提。目前,武装直升机主要通过火控雷达、光电系统、数据链、地理信息系统等获得目标信息。其中,火控雷达作用距离远,搜索效率高,具备多目标跟踪能力,但同时存在长时间开机易于暴露,目标识别能力相对较低等不足;光电系统探测识别精度高,隐蔽性好,但由于视场范围有限,目标搜索效率相对较低;数据链和地理信息系统等外部数据难以直接用于机载火控系统进行目标瞄准,需要完成坐标转换、时间对准等数据处理,才能实现与火控雷达、光电系统等配合使用。
多传感器信息融合与管理控制是提高直升机综合探测能力和战场感知能力的有效手段。利用多传感器信息融合技术,可以弥补单一传感器在探测识别目标能力上的不足,为直升机平台提供精确一致的目标数据。利用多传感器管理控制技术,可实现火控雷达、光电系统等传感器的协同配合,提高复杂环境下目标探测识别效率,缩短OODA作战反应时间。
国内有关学者在机载多源信息融合和传感器管理控制方面开展了大量研究,文献[1]结合航电系统传感器数据特点及信息融合需求,提出了基于修正JDL模型和数据融合树的体系结构设计思想。文献[2]围绕机载信息融合的典型需求和应用现状,提出了适合未来作战飞机的动态信息融合体系机构,研究了时间空间配准及目标状态估计的方法。文献[3]提出了一种复杂战场环境下机载雷达/红外融合探测控制与跟踪方法,给出了协同探测传感器控制策略。以上成果为直升机多源信息融合研究提供了宝贵经验,开拓了研究思路。
本文针对直升机载多传感器的性能特点和作战过程低截获的要求,设计了一种信息融合仿真系统,给出了传感器协同探测的方法。该系统在融合处理火控雷达、数据链、地理信息系统等数据的基础上,利用融合后的目标信息引导光电系统进行协同探测,实现对目标的快速精确瞄准。该方法可提高直升机多源信息利用效率,降低火控雷达探测照射时间,获得优良的低截获性能。
1 直升机多源信息融合仿真系统
1.1 仿真系统组成和功能
直升机多源信息融合仿真系统由火控雷达数据模拟分系统、数据链数据模拟分系统、地理信息系统数据模拟分系统、直升机多源信息融合分系统、载机平台数据模拟分系统、光电系统数据解算分系统和显示模拟分系统等组成,如图1所示。
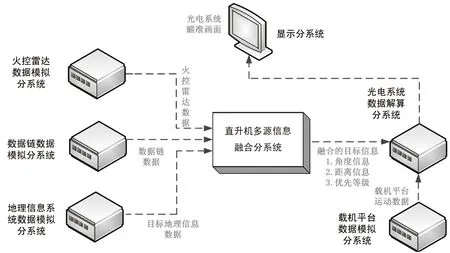
图1 直升机多源信息融合仿真系统组成
直升机多源信息融合分系统用于目标信息融合处理、多目标威胁分析等。火控雷达数据模拟分系统用于生成雷达目标信息。数据链数据模拟分系统用于生成数据链的目标信息。地理信息系统数据模拟分系统用于生成目标的地理位置信息。光电系统数据解算分系统用于目标瞄准信息解算,计算目标瞄准线中心位置,并根据瞄准线偏差确定光学系统探测视场。载机平台模拟分系统用于生成直升机运动数据。显示分系统用于生成光电系统的目标探测与瞄准画面。
1.2 仿真系统软件框架
直升机多源信息融合仿真系统由仿真系统总控模块、数据生成模块、数据融合模块、数据解算模块、数据显示模块以及通信网络等组成,如图2所示。
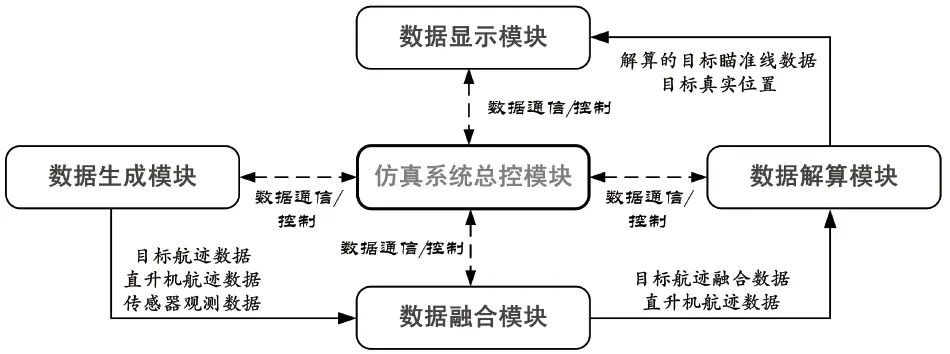
图2 仿真系统软件框架
仿真系统软件采用模块化设计方法,建立软件设计规范和约定,制订接口控制协议,划分软件项目,分解软件模块,完成编码、单元测试和仿真系统软件综合。根据直升机多源信息融合的需求,独立开发数据生成模块、数据融合模块、数据解算模块和数据显示模块,各模块之间通过内存共享技术进行数据通信。在系统软件设计开发过程中,全面描述各模块的功能与接口要求、模型和算法、运行时序、输入/输出要求等。
系统总控模块是仿真系统的“总控台”,它管理控制整个仿真系统的运行,启动仿真流程,调用其它各模块。系统总控模块的主要功能有:
1)提供仿真系统统一的时钟,同步处理软件模块的初始化;全系统流程控制,启动仿真流程,调用其他各个模块。
2)协调整个仿真系统的运作,完成数据生成模块与数据融合模块之间的通信控制,完成各个模块运行的时序排列、输入/输出要求。
3)提供仿真系统人机交互界面,包括选择与显示仿真场景,设置火控雷达、数据链、地理信息系统、直升机状态、目标数量/状态等参数,设置仿真次数,设定传感器组合,启动仿真运行,显示仿真结果。
1.3 仿真系统运行流程
仿真系统采用VisualC++6.0和Matlab混合编程实现,运行环境为win7系统,总体运行流程如图3所示。仿真系统为分布式系统,数据生成模块模拟出目标数据后,将数据依次传输至融合模块和解算模块。数据通信基于TCP/IP协议,利用网络套接字Socket实现,并通过VisualC++6.0提供的CSocket类完成通信处理。
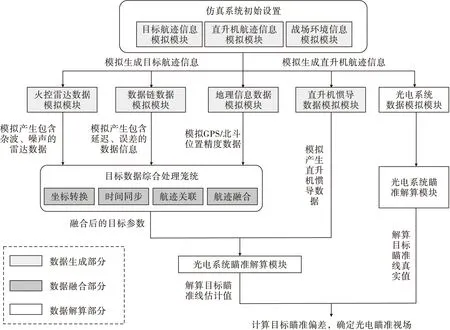
图3 仿真系统运行流程
仿真系统在软件设计时充分考虑了用户接口。其中,在数据生成模块设计时,预留了各传感器的数据接口,实现了模块的通用性。传感器的性能参数通过可编辑的属性页实现,并根据需要选择和输入参数,赋予合理的默认值。传感器的目标航迹信息可以进行中断设定,包括航迹中断起止时间、航迹中断可恢复最大间隔时间等。显示设定通过可选择复合框和可编辑对话框实现。在数据融合模块设计时,根据多目标的优先级顺序,利用通信网络将目标融合数据传送至数据处理和显示模块。
2 数据生成模块
数据生成模块主要包括目标数据模拟、直升机数据模拟和传感器数据模拟。
2.1 目标数据模拟
目标数据模拟模块用于生成每个目标的航迹数据(包括目标位置、速度、加速度),根据设置的典型仿真场景,模拟目标的运动轨迹。每个目标参数相互独立,目标航迹可以预先独立设定,形成航路点文件保存,也可对其进行实时操作。
目标数据生成模块由系统总控模块调用,该模块的输入是目标数量、目标运动参数和仿真时间。目标运动模型主要有:匀速模型、匀加速模型、交互式多模型、当前统计运动模型等。模块输出是目标在每个仿真时刻的运动参数。
2.2 直升机数据模拟
1)直升机航迹信息模拟模块
直升机航迹信息模拟模块用于生成直升机的空间航迹数据(包括直升机位置、速度、加速度),模拟直升机的运动轨迹。直升机航迹可任意设定,或采用预定航路点文件给出。
该模块的输入是直升机平台的机动性能参数和仿真时间。直升机运动模型主要包括匀速模型、匀加速模型、圆周运动模型、交互式多模型、当前统计运动模型等。模块输出为直升机在每个仿真时刻的运动参数。
2)直升机惯导数据模拟模块
直升机惯导数据模拟模块是以生成的直升机航迹信息为基础,综合考虑惯导系统的位置误差和角度误差,叠加生成直升机的惯导数据,包括直升机位置(经度、纬度、高度)、速度矢量、飞行姿态(方位角、俯仰角、滚转角)数据等。
2.3 传感器数据模拟
根据系统总控模块选定的仿真场景,以及设置的传感器参数进行加噪加杂处理,实现火控雷达、光电系统、数据链的目标数据模拟。
1)火控雷达数据模拟模块
火控雷达数据模拟模块用于生成雷达测量数据;该模块的输入是目标数据模拟模块生成的目标数据,输出是每个时刻目标在火控雷达坐标系中的距离、角度(方位角、俯仰角)、速度等参数。该模块中加入了正态分布和瑞利分布噪声来模拟雷达探测目标的随机噪声,以此提高数据仿真的逼真度。
2)数据链数据模拟模块
数据链数据模拟模块用于生成数据链提供的信息,该信息包含了数据率和传输延迟,暂不考虑数据丢包。其中,数据链的精度和数据率由提供目标数据的平台和通信网络决定;传输延迟由数据包发送和到达时间确定。
3)地理信息数据模拟模块
地理信息数据模拟模块用于生成目标在大地坐标系统下的参数信息,包括目标的经度、纬度、高度。
3 数据融合模块
数据融合模块是仿真系统的核心,它接收火控雷达、数据链和地理信息系统等目标数据,先进行坐标转换、时间对准等数据预处理,再进行航迹融合。
3.1 数据预处理
数据预处理是多源信息融合的基础,直升机平台不仅要融合机载传感器的数据,还要融合其它平台利用数据链等传输的数据。这些数据具有不同的采样间隔、数据格式、观测坐标系,需要对其进行坐标转换、时间对准、延迟外推等预处理。
1)坐标转换
直升机载火控雷达、光电系统、数据链系统等都是基于各自的观测坐标系。实现信息融合前,必须将不同坐标系的观测值转换到统一参考坐标系。仿真系统中采用的坐标转换关系如图4所示,坐标转换采用齐次坐标转换方法进行,先坐标系转换,后坐标平移。
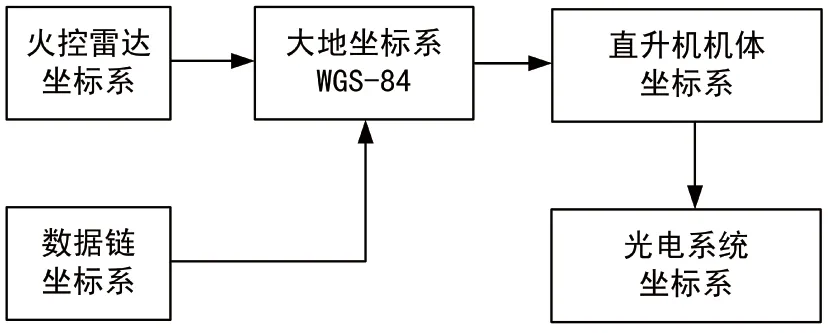
图4 坐标转换示意图
2)时间对准
由于各传感器上报数据的起始时间及数据率不同,在数据融合前,仿真系统主要采用最小二乘、内插外推、拉格朗日二次插值等[4]方法,将不同时刻的传感器数据进行时间对准。
3)状态延迟外推
由于通信传输原因,数据链的目标数据存在延迟,仿真系统采用“目标观测补偿”的方法,虚拟产生目标量测值,在卡尔曼滤波算法的基础上,实现对数据链传输延迟的外推补偿。设数据链传输延迟时间为td,虚拟产生的目标量测补偿值为
(1)
其中,xk+1为目标状态,zk+1|k为k+1时刻的目标观测值,zk+td|k为延迟外推后的目标观测值。
3.2 航迹融合
直升机多源信息融合采用分布式融合结构,首先由各传感器形成目标的航迹信息,在航迹关联基础上,对分布式航迹数据进行融合。根据各传感器的目标航迹信息是否同步,分为航迹同步融合和航迹异步融合[5]。
1)航迹同步融合
航迹同步融合是以火控雷达、数据链、地理信息系统等传感器的局部状态估计为基础,统一进行数据融合处理。由于在相同的战场环境下,火控雷达、数据链等多传感器之间的量测噪声存在相关性,从而对航迹融合精度产生影响,因此在仿真系统的软件算法设计中,重点引入噪声不相关和噪声相关两种融合算法[6]。这两种方法均等价于集中式融合算法,航迹融合估计的结果是最小均方根意义下的。其中,噪声相关的融合算法可适用于噪声相关程度高的作战环境,能够提高火控雷达、数据链等数据的融合精度。
2)航迹异步融合
由于火控雷达、数据链、地理信息系统等传感器数据不同步,以及数据链传输延迟等问题,无法进行航迹同步融合。为此,在仿真系统的软件算法设计中,引入可应用于工程实践的航迹异步融合算法,并采用集中式、分布式、实时更新的三种异步融合策略[7]来解决各传感器不同采样速率和数据处理周期的问题。
4 数据处理与显示模块
4.1 数据处理模块
数据处理模块主要用于接收数据融合模块的信息,进行目标瞄准线解算,然后将计算的目标瞄准线与真实目标线进行对比,以此确定目标瞄准线方位和俯仰角度偏差[8],如图5所示。模块输入是目标位置、直升机位置和姿态参数,模块输出是光电系统目标瞄准线的方位角和俯仰角。
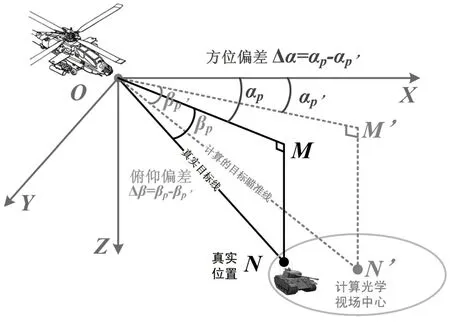
图5 目标瞄准线角度偏差示意图
光电系统目标瞄准线角度偏差计算方法如下:
步骤1:目标瞄准线计算。根据融合后的目标数据与直升机的空间位置关系,计算光电系统目标瞄准线的方位角和俯仰角。
步骤2:目标瞄准线偏差计算。将计算的目标瞄准线与真实目标线进行对比,分别计算方位角和俯仰角的目标瞄准线偏差。
步骤3:迭代计算。仿真系统设置了随机误差,采用蒙特卡洛统计试验法,计算目标瞄准线偏差均值。
4.2 数据显示模块
数据显示模块主要用于显示光电系统的目标瞄准线和探测视场,以及目标的显示位置。根据计算目标瞄准线与真实目标瞄准线的偏差大小,存在四类典型情形:一是目标位于光学系统小视场内;二是目标位于光学系统中视场内;三是目标位于在光学系统大视场内;四是目标位于在光学系统大视场外。光电系统需要根据计算的目标瞄准线偏差,合理确定视场中心和视场范围,实现对目标的快速精确瞄准。
5 结束语
本文针对直升机多源信息融合的需求,设计了一种信息融合仿真系统,并给出了传感器协同探测的方法。该系统在融合处理火控雷达、数据链、地理信息系统等数据的基础上,利用融合后的目标信息,引导光电系统进行协同探测,实现对目标的快速精确瞄准。利用提出的方法可以提高直升机多源信息利用效率,降低火控雷达探测照射时间,获得优良的低截获性能,研究成果可为开展直升机多源信息融合技术研究提供参考。由于火控雷达作用距离远,在协同探测时还要考虑雷达以及数据链提供数据与光电系统探测距离匹配性的问题。
