77G汽车防撞雷达角度测量算法研究
2021-07-21郑建超
郑建超
(中国电子科技集团公司第三十八研究所 合肥 230088)
0 引言
随着科技的进步,智能汽车已经成为未来汽车发展的必然趋势。车载雷达作为智能汽车的关键传感器之一,愈来愈得到重视。在常见的车载雷达中,毫米波雷达相比于激光雷达具有独特的优势,在汽车防撞系统中更是不可或缺。为了提高车载毫米波雷达的探测性能,除了不断增强雷达系统的硬件性能外,信号处理算法的研究一直以来也是备受关注[1]。在雷达系统中,测角精度是衡量目标定位、跟踪能力的一个重要指标[2]。
目前与雷达天线定向有关的目标角度估计方法有两种:一种是在多个天线相位中心采用相位测量方法,本质上是相位干涉法;另一种在天线波束控制或者波瓣转换的过程中使用多个幅度测量[3]。比相单脉冲测角技术[4-5]与和差比幅单脉冲测角类似,二者的目的皆是为了提取其角度坐标信息。主要的区别为比幅单脉冲测角生成的信号都是相位相同而幅度不同;比相单脉冲测角正和好与之相反,信号幅度相同而相位不同。 由于本雷达系统中相位信息相比信号幅度信息稳定,因此更加适合应用比相单脉冲测角方法,比相单脉冲测角是将接收端天线阵列划分为N个子天线阵,通过两两子阵接收到的回波信号间的相位差可以获得目标角度信息[6]。在测角的过程中会存在角度模糊和奇异值的问题,本文提出了长短基线解角度模糊算法和基线3判2去角度奇异值算法,均获得了较好的效果。
1 基于相位的角度测量原理


图1 平面波对等距线阵的影响
0≤…n≤…N-1
(1)
当t=t0时,在每个相位中心测得的N组电压样本,并将样本排成一个列矢量y,即

(2)
y=[y[0],y[1],…,y[N-1]]T
(3)
空间相位历程矢量y称为到达阵列信号的空间快拍。定义归一化空间频率kθ=2πdsinθ/λ,其中,kθ是空间频率(单位rad/m)投影到阵列平面的分量((2π/λ)sinθ)乘以阵列采样间隔(阵元间距d),则空间快拍变为
(4)
式(4)为快拍时对具有归一化弧度空间频率-kθ的复正弦信号的采样。
假设雷达工作波长λ和相位中心间距d已知,测到kθ,则可以得到入射角。
2 长短基线解角度模糊算法
77G汽车防撞雷达采用线性调频连续波雷达,三发四收,四路接收通道两两组成一组测角基线,相邻接收通道组成三组短基线,通道1、3和通道2、4组成两组中基线,通道1、4组成1组长基线。
1)基线越长测角精度越高;
2)短基线没有测角模糊,长基线和中等基线有测角模糊;
3)长短基线解模糊算法:用短基线解长基线和中等基线的测角模糊。

下面比较长基线测角精度和两个中基线与一个长基线平均测角精度。
如图2、图3所示,应用平均后的测角方法测角精度显著提高,在±40°(雷达测角范围内)以内精度为±0.5°,满足测角精度要求。
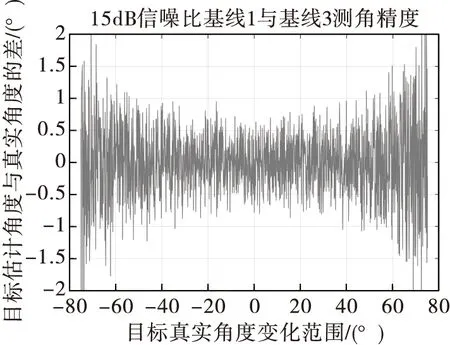
图2 15dB信噪比 长基线测角精度

图3 15dB信噪比 两个中基线与一个长基线平均测角精度
3 基线3判2去角度奇异值算法
由于相位差周期性原因,测量的角度在正负90°的边缘处会产生测角奇异值,提出以下解决方法。
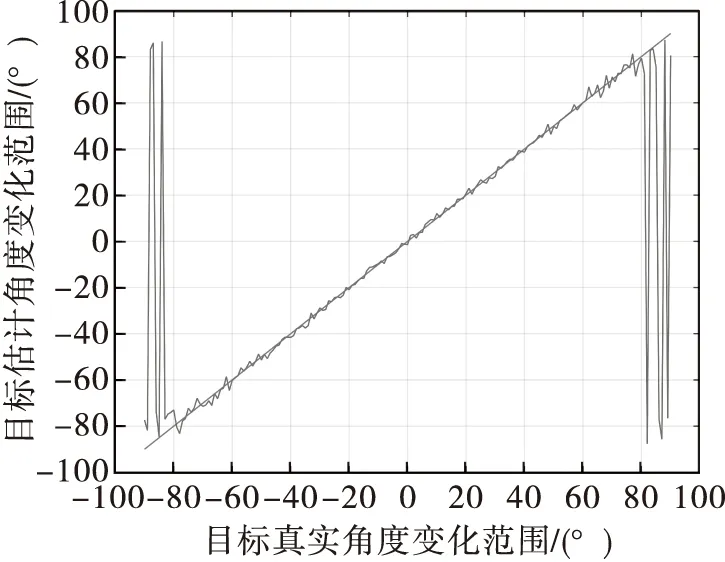
图4 3短判2:其中一个短基线未修正情况
3判2去奇异值算法:长基线和短基线端点会产生奇异值,可选择三个短基线3判2去除奇异值,也可选择两个短基线和一个长基线3判2去除奇异值,加入一个长基线进行判定可以减少一个短基线的计算量。

图5 3短判2:三个短基线修正后结果

图6 2短1长未修正情况

图7 2短1长3判2去奇异值结果
最终可以看出选择两个短基线和一个长基线3判2去除奇异值效果更佳。由于相位差周期性原因,测量的角度在±90°的边缘处会产生测角奇异值,本文提出的基线3判2去角度奇异值算法,获得了较好的效果。
4 结束语
在77G汽车防撞雷达系统中,本文提出了长短基线解角度模糊算法和基线3判2去角度奇异值算法。长短基线解角度模糊算法可以准确地解决角度模糊问题,通过对短基线角度估计值与模糊的三个角度估计值进行比较来解模糊,计算效率显著提高。
基线3判2去角度奇异值算法,解决了测量的角度在±90°的边缘处会产生测角奇异值的问题,获得了较好的效果。
