基于无人机平台的迭代时差定位方法
2021-07-21苏若龙郑先宝
苏若龙 白 昊 郑先宝
(西安电子工程研究所 西安 710100)
0 引言
由于时差定位具有定位精度高、定位速度快等优点,因此时差定位已成为高精度定位技术所采用的主要技术方案[1]。时差定位实质上是利用辐射源到各定位站时间差(TDOA)解算辐射源位置信息的过程,因此得到正确的时差是时差定位的基础。然而随着雷达技术的不断发展越来越多的新体制雷达使用了高重频信号,这就导致脉冲配对过程中出现模糊从而出现多个定位结果,因此如何避免脉冲配对模糊已经成为时差定位亟待解决的问题[2]。针对这一问题文献[3]利用雷达解距离模糊的原理提出一种算法来解高重频模糊,但是此方法在辐射源信号重频出现公倍数时则仍会模糊。文献[4]、文献[5]提出测向与时差相结合的解模糊算法,通过测向结果将定位区划分为不同的区域以达到解模糊的目的。这种方法需要增加额外的测角设备,提升了系统复杂度不适用于无人机平台。此外文献[6]还提出一种统计直方图峰值检测的方法解模糊,但是这种方法需要较长时间的累积,不能达到快速定位的要求。上述文献都是通过辅助信息剔除模糊解得到真实辐射源位置信息,本文从时差定位原理出发结合无人机载平台的特点提出一种迭代时差定位方法,在脉冲配对过程中直接解决高重频模糊问题。
1 无人机载时差定位系统分析
无人机载时差定位系统的大致工作流程如图1所示,各定位站对辐射源信号进行测量得到侦察数据,并将测量得到的侦察数据送入定位主站。主站对侦察数据进行分选以及辐射源库匹配,根据匹配结果进行对TOA进行脉冲配对及时差配对得到时差信息。最终利用时差定位算法解算出目标位置信息,并根据滤波算法对定位结果进行滤波跟踪。本文主要研究脉冲配对以及目标定位两部分,对其余部分不做赘述。

图1 无人机载时差定位处理流程图
1.1 脉冲配对原理及脉冲配对模糊
图2是一种典型的无人机三站时差定位场景。
由图2中的位置关系可知,辐射源与三个定位站之间的距离分别为R0、R1、R2,主站与两辅助站的距离分别为d1、d2。以定位主站与辅助站1为例,根据三角形的基本定理满足公式(1)。
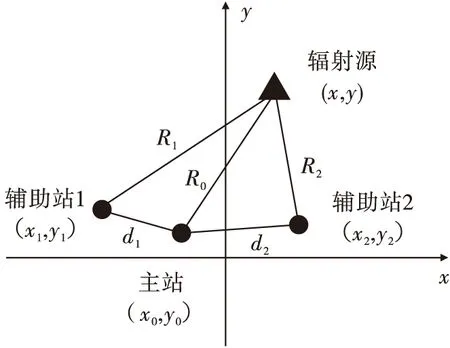
图2 无人机载三站时差定位场景
d1≥|R1-R0|
(1)
由式(1)可知主站与辅助站1之间的时差Δt1的范围为
(2)
其中,c为光速。
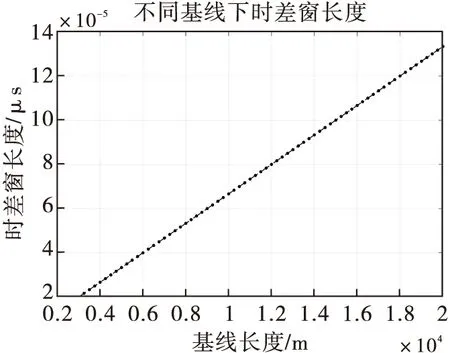
脉冲配对即以主站接收脉冲的到达时间为基准,在[-d1/c,d1/c]内寻找与之配对的辅助站脉冲(w1=2d1/c为时差窗长度)。当辐射源发射信号的重复周期PRI≥w1时,时差窗内只存在一个脉冲,此时脉冲配对结果唯一如图3(a)所示。当PRI 图3 脉冲配对示意图 根据式(2)定义可知时差窗的大小与基线的长短呈线性关系,如图4所示。 图4 不同基线下时差窗长度 本文所使用的时差定位算法为Chan算法,定位站与辐射源位置如图2所示。辐射源到主站及两个辅助站之间的距离为 (3) 辐射源到主站与两个辅助站的距离差为 ΔRi=Ri-R0i=1,2 (4) 将式(3)带入式(4)中并将其写为矩阵形式为 AX=F (5) 式(5)中 (6) 则通过对矩阵A求逆(A无逆时可求伪逆),可以得到 (7) 令A-1=[aij]i=1,2;j=1,2对式(7)进行化简可得 (8) 式(8)中,mi=ai1k1+ai2k2,ni=ai1ΔR1+ai2ΔR2(i=1,2)。 将式(8)带入式(3)中R0的表达式,可得 (9) 式(9)中, (10) 通过式(9)的一元二次方程可以解出R0,将解出的R0带入式(8)中即可解得辐射源的位置信息。 时差定位的定位精度通常使用GDOP (Geometrical Dilution Of Precision)表示,其值越小则定位精度越高,反之则定位精度越差。其表达式为 (11) 其中,σx,σy为定位误差在x,y方向上的方差。 通过对式(4)求微分并将微分结果写为矩阵形式可得 dΔR=F·dR+dS (12) 其中dΔR为各个定位站之间时间测量误差引起的定位误差;F为辐射源与各定位站之间的方向余弦,与定位站与辐射源的位置有关;dR为定位误差;dS为定位站的站址误差。 则通过计算可得到定位误差值为 dR=(FTF)-1FT(dΔR-dS) (13) 从式(13)中可知定位误差与站址误差以及时差测量误差有关。假定时差测量误差在修正后为零均值,站址误差在测量过程中不变且各站之间的站址误差之间互不相关,则可以得到定位的协方差矩阵为 P=E[dR·dRT]=C{E[dΔR·dΔRT]+ (14) 令[eij]=E[dΔR·dΔRT]+E[dS·dST]: (15) 其中,σΔRi为时差测量引起的第i站与主站的距离差的标准差,ηij为dΔRi与dΔRj的相关系数,σs为站址误差的方差。令C=[cij],P=[pij],则有 (16) 则根据GDOP的定义可得 (17) 令定位主站为坐标原点,主站与两辅助站之间基线之间的夹角为60°且基线相同,时差测量误差20ns,站址误差30m,辐射源位于(-2000m,30000m)处,定位区域位为X轴(-10000m,10000m)Y轴(0,40000m)。在上述场景下对定位基线3km到20km进行仿真,得到整个定位区域的定位精度(GDOP)如图5所示,辐射源位置处的定位精度(GDOP)如图6所示。图5中三角形为定位站,*为目标辐射源所在位置。从仿真结果可以看出基线越短定位精度越差,随着基线的不断拉升定位精度逐渐提高最终收敛至零附近。 图5 定位区域定位精度仿真结果 图6 不同基线下辐射源位置处定位精度 经过第一节分析发现系统的抗高重频模糊能力与定位精度均与定位基线有关,将图4、图6中的数据列入表1中。结合表1中数据以及第一节分析,如果需要提高系统抗高重频能力,就需要将缩短定位基线但定位基线的缩短会导致定位精度变差。针对这一问题本文提出一种新的迭代定位方法,通过改进脉冲配对算法解决这一矛盾,使系统在具备较高定位精度的同时具备较好的抗高重频能力。 表1 不同基线下精度及时差窗长度 传统脉冲配对方法以主站脉冲到达时间t0作为基准进行配对,辅助站中与该脉冲对应的匹配脉冲出现在t0+Δt处(Δt由辐射源与主站和辅助站距离差决定)处。在脉冲配对的过程中如果能得到Δt,则可直接与t0+Δt处脉冲进行配对,无需按照时差窗进行搜索。然而根据1.2节的分析在实际定位过程会存在一些误差导致由定位结果计算得到时差Δt′≠Δt,因此根据定位精度的概念将GDOP的值σR放大λ(λ>1)倍作为时差窗长度进行脉冲配对,如图7所示。 图7 迭代法脉冲配对示意图 初次定位时没有先验信息来计算时差Δt′,因此初次定位时仍可使用传统方法。初次定位得到定位结果后,后续每次定位可使用前一次定位结果计算Δt′进行脉冲配对。在表2的仿真场景下,分别对传统方法的定位方法以及本文的时差定位时差窗长度进行仿真,仿真结果如图8所示。 表2 仿真参数表 图8 传统算法与本文算法时差窗对比 图中圆圈为传统算法时差窗长度,三角形为本文算法的时差窗长度,可看出首次定位时由于缺乏相应的先验信息两种算法时差窗长度相同。随着基线的不断拉长,传统算法的时差窗长度随着基线不断变长而本文算法的时差窗长度逐渐收敛至零。在定位基线小于4km时由于基线过短定位精度较差本文算法的时差长度大于传统算法的时差窗长度即抗高重频能力较差。当基线大于4km时随着定位精度的提升,本文提出的算法得到的时差窗长度逐渐减小并小于传统算法。 针对上述仿真发现的问题使用以下方法对算法进行改进。在短基线下将本文算法与传统算法的时差窗进行比较选择较短的作为脉冲配对时差窗;现实情况中由于其他因素影响定位参数存在抖动,因此会出现多个定位结果。使用卡尔曼滤波对结果进行滤波使用滤波结果作为最终的定位结果,可以一定程度上消除参数抖动引起误差;并且当定位精度达到要求时,不再迭代更新时差窗长度,防止因时差窗过小导致脉冲配对失败。改进后的算法步骤如下所示: 1)测量辐射源到各定位站的TOA(初次定位基线可根据辐射源的PRI灵活选取),若为初次定位则执行2)否则执行3); 2)使用传统方法进行脉冲配对并计算时差; 3)对比当前基线下本文算法与传统法时差窗长度,选择时差窗较短的方法进行脉冲配对; 4)根据配对结果进行定位并对定位结果进行滤波,计算定位精度GDOP的值σR; 5)判断定位精度是否能达到所需要求,如精度未达到要求则拉升定位基线d进行下一次定位,否则保持基线不变对辐射源进行持续定位; 6)根据需要改变基线d,并执行1)。 在表2所示的仿真场景中使用改进后的算法进行仿真得到时差窗长度与定位精度(当定位精度高于3%R认为定位精度达到要求),得到的仿真结果如图9,图10所示。 图9 改善后时差窗长度 从图9中可看出当定位基线小于4km时定位精度较差,此时使用传统脉冲配对法此时时差窗长度为2L/c。当定位基线大于4km时,由于基线的提升定位精度逐渐变高,此时使用本文算法进行脉冲配对时差窗长度为λσR。当定位基线为6km时相对定位精度为2.9%R达到要求(3%R),因此在6km基线下对目标进行持续定位不再提升定位基线。对比表1中的数据,如果使用传统方法进行定位则定位系统的最小不模糊PRI为40μs,而使用本文算法定位系统的最小不模糊PRI仅为26.4μs,相较传统算法本文提出的算法将系统的抗高重频模糊能力提升约了一倍。并且从仿真结果可以看出本文提出的方法,在提高了系统抗高重频模糊的能力的同时将系统抗高重频模糊能力与定位精度有机结合,做到在较长基线下既有较高的定位精度又有较好抗高重频干扰能力。 随着电子战在现代战争中地位以及作用的不断提高,时差定位也扮演者越来越重要的角色,然而如何抗高重频模糊一直是困扰时差定位发展的难题之一。本文以无人机时差定位作为应用场景,从时差定位的原理、定位精度以及脉冲匹配的原理出发,通过分析定位精度与脉冲配对时差窗之间的关系,提出一种迭代的定位方法。并分别对该方法以及传统方法进行了仿真实验,通过对比仿真结果发现该方法将定位基线与定位精度及时差窗长度有机结合,解决了系统定位精度与抗高重频模糊能力随基线变化的矛盾,在时差定位系统抗高重频模糊的能力的同时也具备较高的定位精度。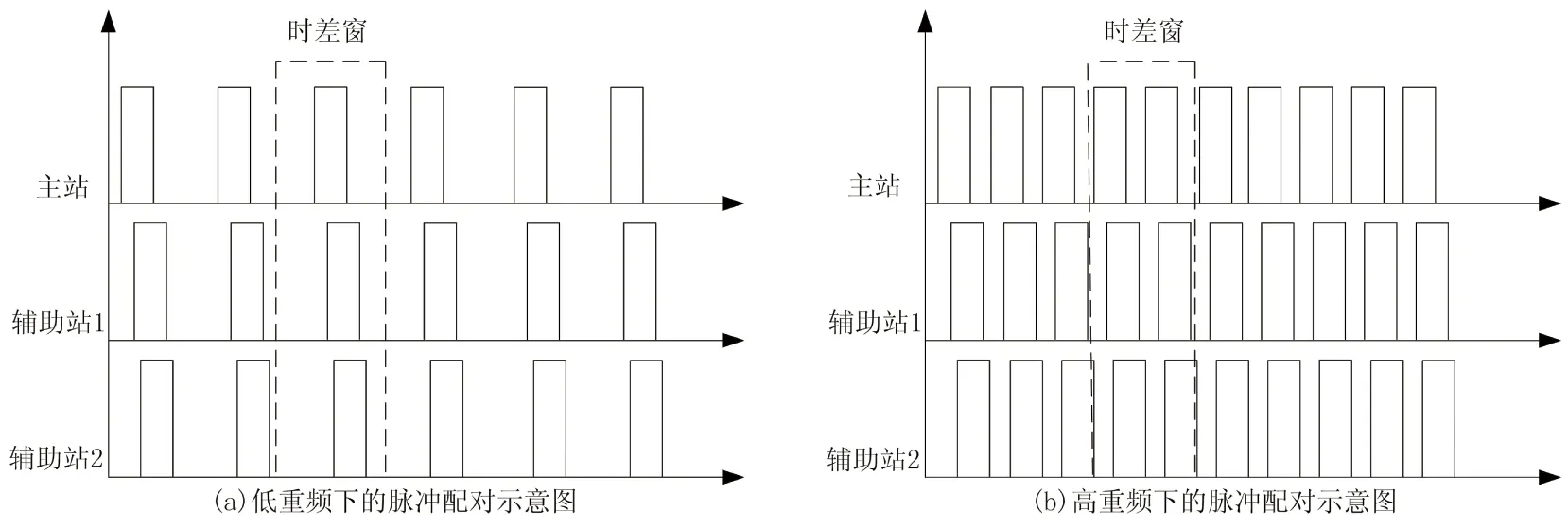
1.2 定位算法及误差分析[8-9]
E[dS·dST]}CT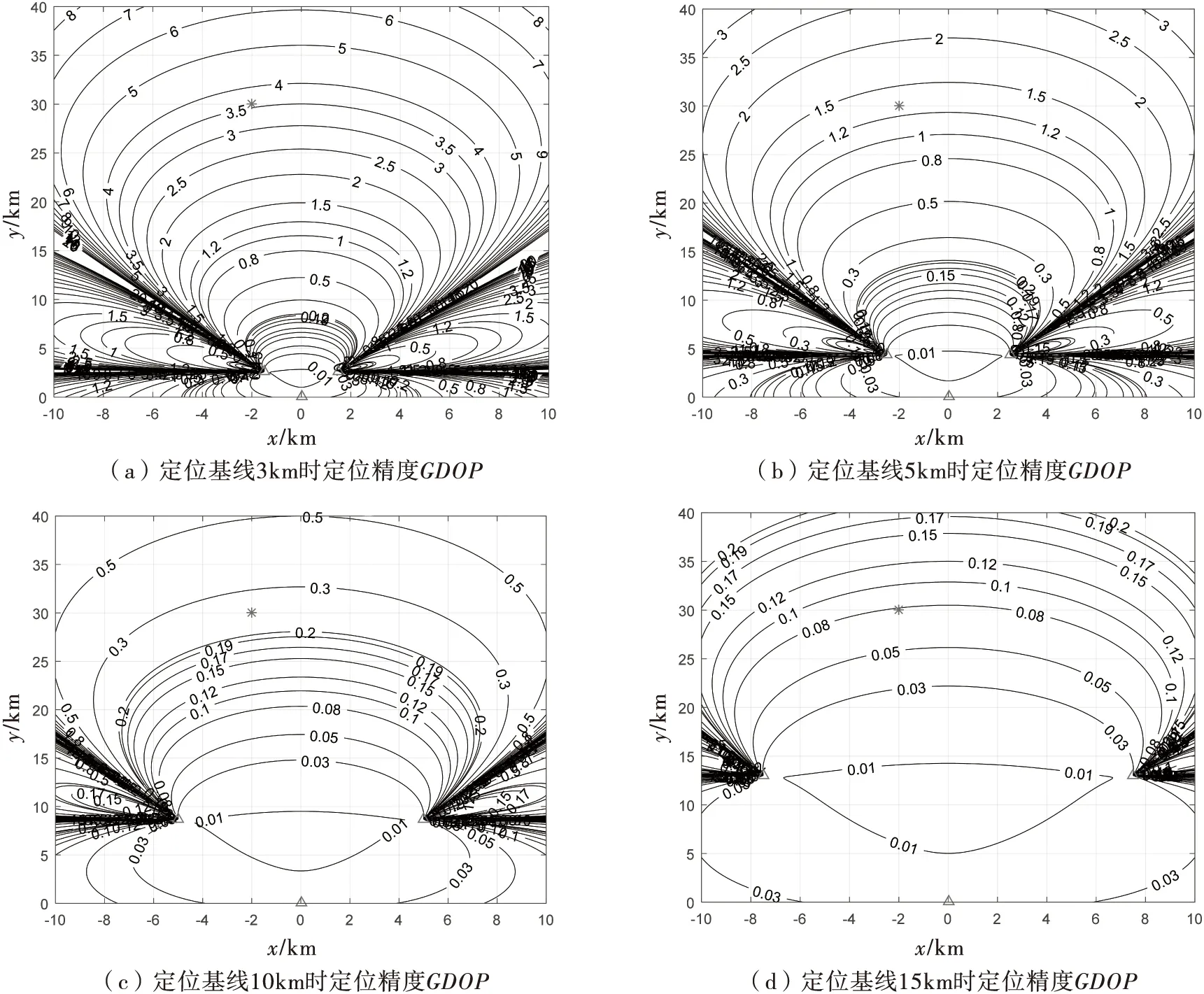
2 迭代时差定位方法


3 结束语
