面向设计状态递进转换的零件多域视图模型
2021-07-13刘彦超李金萍高常青
马 宁,杨 波,刘彦超,李金萍,高常青
(济南大学机械工程学院,山东 济南 250022)
产品建模包括零件建模和装配建模两方面[1]。目前,零件建模主要采用基于特征的方法,即基于CSG(constructive solid geometry,实体模型)、B-Rep(boundary representation,线框模型)等表示方法从几何结构和几何形状的角度对零件进行描述。在零件建模过程中,一些隐含的表达几何形状特征的内在设计知识无法直接传递到模型中。零件模型应是一个具有过程性、动态性和层次性的对象定义模型,它的合理构建有利于设计知识的有效传递以及系列产品间零件的有效借用,这在一定程度上有助于提高设计效率和精度。
零件的设计方法主要有基于功能的设计方法和基于结构的设计方法两种。
基于功能的设计方法主要通过将目标功能转化为零件之间的配合结构和配合行为,继而转化为零件的形状特征,来完成零件主要功能结构的设计。例如:通过装配接口和装配语义元定义零件的几何特征信息[2];通过“使定表面”和“定位表面”等功能表面的几何形状约束实现功能的传递[3-4];通过装配特征偶的构建,实现设计意图的传递,进而使得零件建模和装配建模得到更好的集成[5-6]。
基于结构的设计方法主要从几何结构构成的角度研究零件模型的构建及结构优化。例如零件结构布局的设计方法[7-8]、基于几何结构单元变异及重用的零件变异设计方法[9-11]和基于力学性能的零件结构拓扑优化设计方法[12-13]。此外,学者也提出了在产品设计阶段进行零件表面形貌建模的方法[14-15]、功能梯度材料零件的建模方法[16]和零件的再制造设计方法[17-19]。
上述研究主要聚焦于零件功能、行为与结构之间的映射表达及结构组织等,而对模型本身的辅助设计关注较少。零件模型应是体现自身不同形态、不同设计阶段领域知识的载体,兼具描述零件几何尺度信息的狭义特性,同时也应涵盖功能要求、功能结构过渡信息、结构演化时序信息等顶层抽象特性。在自顶向下的设计过程中,随着功能、结构等领域知识的引入,零件结构呈现不断递进转换的设计状态。在方案构思阶段,处理的主要是抽象的功能及语义知识,通过概念设计方案反映零件的功能实现机理;在详细结构设计阶段,通过概念设计方案的实例化处理,构建零件几何结构模型,这一阶段处理的是几何特征知识。两者因处理对象的不同而存在脱节。如何将方案构思融入几何模型,实现知识的有效传递,对于实现功能设计与结构设计的有效集成,进而实现设计自动化具有重要意义。
为此,笔者基于对零件模型拓扑结构和功能的解析,通过对零件构成单元几何结构、形位和进化时序的分析,建立了基于功能与结构约束的零件约束模型;在此基础上,基于零件设计过程中的状态递进转换特性,将抽象语义知识进行结构化处理,构建由功能视图模型、功能结构过渡视图模型、结构约简视图模型和结构视图模型组成的自顶向下的多层次零件视图模型;提出了基于多域视图模型的零件设计方法。基于多域视图模型,可形成产品结构的多重解释,在功能驱动下实现零件结构的系列化设计,形成“方案产生—语义向知识转化—结构设计”的设计知识有效传递过程,实现概念设计与详细设计的初步集成。
1 零件建模过程和零件设计状态演化过程解析
1.1 零件建模过程解析
产品设计是一个约束满足问题,即:在给定设计要求的基础上,通过拟定抽象化的功能结构,在功能满足的条件下,充分考虑各种设计约束并形成诸多约束的有效组合,产生设计方案[20]。
而对于产品的基本组成单元——零件,其建模过程可解析为状态转换过程,如图1所示。

图1 零件建模过程解析Fig.1 Analysis of part modeling process
零件建模过程为:首先,基于已有的设计知识,通过多元冲突消解进行功能规划,产生零件的功能模型;然后,对功能规划方案进行基于知识扩展的层级演化,得到满足功能要求的结构设计方案。即:首先,建立满足基本功能要求的零件符号模型,并将其转化为功能表面及其名义特征模型(即构成几何要素的基本单元,如点、线、面,如图1(a)所示),实现设计空间的初次约简与构建;其次,根据零件符号模型中所隐含的功能和制造信息,将抽象的功能表面映射为结构实例单元(如图1(b)所示),建立零件的标准模型;最后,将结构单元之间的几何、形位等的约束信息进行扩展,建立实际的零件扩展结构模型(如图1(c)所示),获得符合约束要求的零件实例。
1.2 零件设计状态演化过程解析
零件设计就是将设计意图F映射成具有一定功能的几何结构,并按照一定的规则合并成最终的几何形态。零件设计的最终结果体现为几何特征G与约束关系特征C的组合,用数学模型可表示为:

在零件设计过程中,零件设计状态为一递进的演化过程(如图2所示),并具有以下特征:
1)在最初的问题状态,零件设计状态为抽象的功能信息。
2)在概念设计阶段,通过初始功能信息的传递,零件的设计要求可符号化地表示为功能知识,通过对功能区域的操作形成零件的最初解状态。
3)在从功能到结构的转化过程中,零件将历经多个状态的转变。其间功能知识演化为零件各构成单元的结构信息以及各单元间的拓扑约束关系、形位约束关系,并在功能信息的约束下形成多个中间解状态。
4)在详细结构设计阶段,基于几何及约束的可行性,零件的初始结构信息以及各单元间的关联约束信息不断扩展,零件结构设计呈现为一个渐进的、结构信息不断丰富并具有时序特征的扩展过程,并形成最终解。

图2 零件设计状态演化过程解析Fig.2 Analysis of evolution process of part design status
零件功能的实现依赖于其几何特征及其之间的有序关联。从模型构成的角度看,零件模型除了其外在几何特征的表现,还应蕴含功能、拓扑以及形位等关联约束信息。在设计过程中,通过功能的分解和重构,形成对几何特征、关联约束的定义;在此基础上,几何特征和关联约束不断分解、重构与演化,最终形成零件实体的结构模型。因此,广义上的零件模型应包括结构维度、关联约束维度和功能维度三方面的信息,如图3所示。
2 零件关联约束模型
产品功能在宏观上通过装配结构设计得以实现,在微观上则依赖于零件自身几何特征的性质和特征之间的约束关系。零件可被视为具有内部相互作用关系的装配结构通过几何特征面对间的相互作用、有序装配,在空间及形位等几何约束下实现功能要求。其设计约束除功能约束外,一般还包括为满足功能目标而设定的结构、配合和设计序列等约束。因此,零件约束模型应从功能、进化序列、拓扑和形位关系等多个角度加以描述。
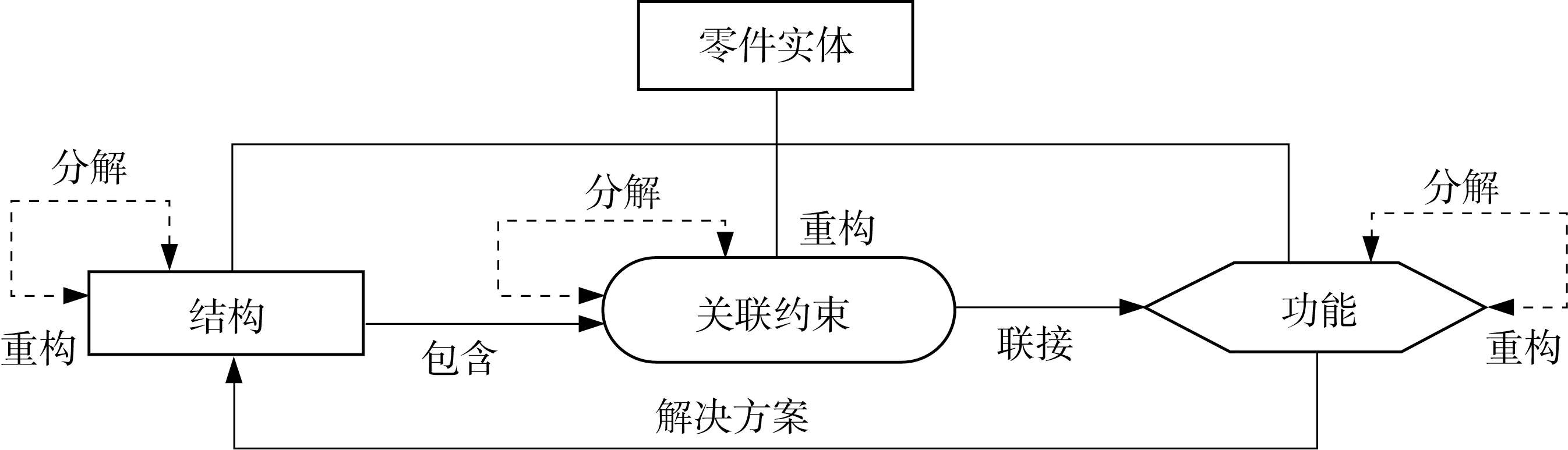
图3 零件模型的信息构成Fig.3 Information composition of part model
2.1 功能约束模型
2.1.1 功能约束关系
构成零件的功能单元在相互结合形成总功能的过程中,存在着时序关系和逻辑关系。
1)时序约束关系。
零件功能的实现并非是无序的,而是按照其目标功能实现的规律或路线存在着进化序列,体现为一种“流”的传递过程。按照相邻功能单元是否存在功能与结构之间的约束关系,时序约束关系分为有序列约束关系和无序列约束关系两种。有序列约束关系是指功能单元为上下层特征关系,子层功能的性质、结构由父层特征来限定,如图4(a)所示。无序列约束关系是指相关功能单元处于同一等级,单元之间无父子或继承关系,而仅存在结构上的连接关系,如图4(b)所示。
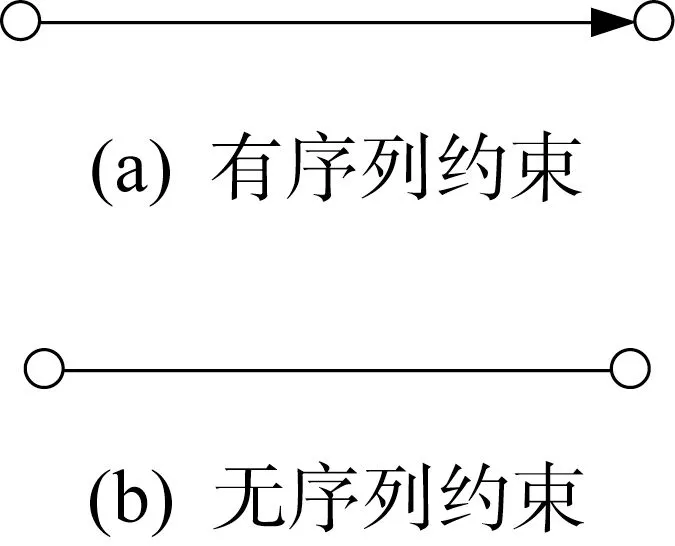
图4 功能时序约束关系Fig.4 Functional time sequence constraint relationship
图5所示为零件支架的功能时序约束关系。该零件目标功能包括轴支撑P1、底面支撑P2,两者是无序列约束关系;在此基础上演化的连接和加强两个功能依赖于上层功能P1、P2,因此与P1、P2形成有序列约束关系。
2)逻辑组合关系。
零件的目标功能一般可逐级分解为若干个相互关联的子功能,由物料流、能量流和信息流将这些子功能联系起来,按照一定的约束条件和相互关系组成一个整体。各子功能相互协调和配合实现总功能,子功能之间的逻辑约束关系主要包括并联、串联等模式[21]。
2.1.2 功能约束单元模型
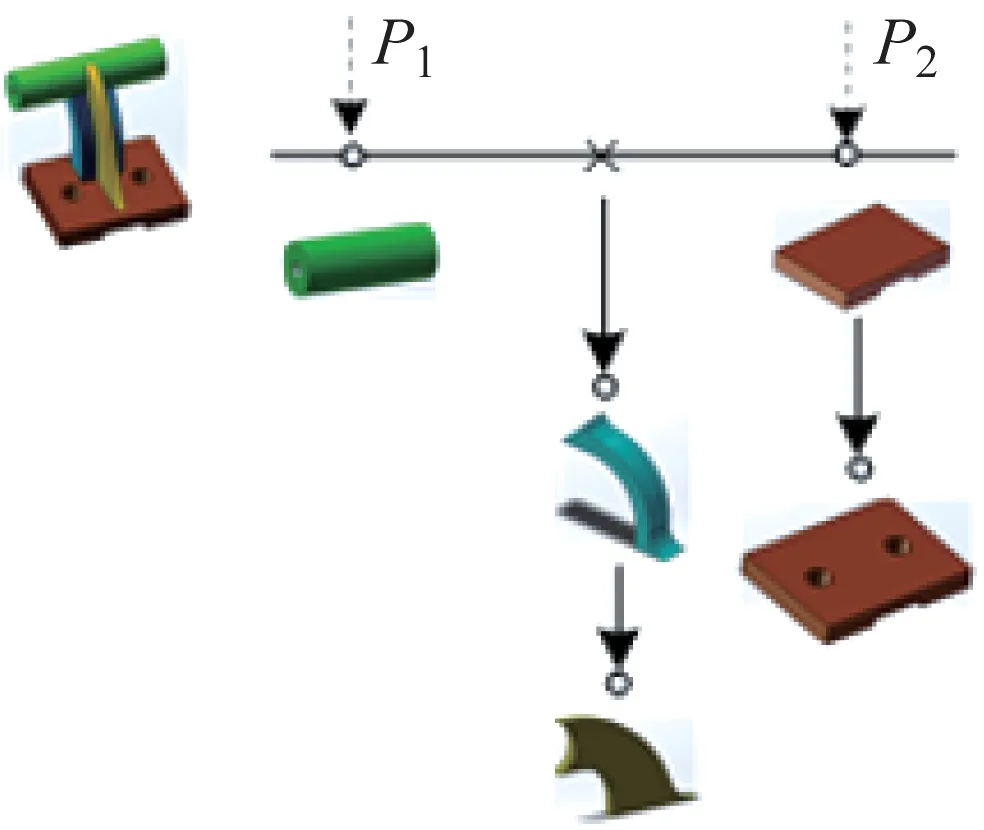
图5 支架的功能时序约束关系Fig.5 Functional time sequence constraint relationship of bracket
根据相邻功能单元之间的时序约束和逻辑组合关系,从功能单元之间的约束关系角度出发,建立构成功能模型的基本单元——功能约束单元。常见的功能约束单元包括串行无序列、有序列单元,并行无序列、有序列单元,合并串行无序列、有序列单元和分支并行无序列、有序列单元,如图6所示。功能约束单元根据特定的功能要求进行组合即构成零件功能模型。
2.2 结构约束模型
复杂零件往往是由多个子结构在满足结构约束的条件下组合而成的。结构约束主要包括子结构的几何属性及结构关联所限定的拓扑关系约束,以及功能约束作用于子结构而产生的形位约束。
2.2.1 拓扑关系约束
用于描述零件几何要素间的方位关联、零件模型各分量间的结构关联等的约束为拓扑关系约束。拓扑关系约束是由子结构的物理属性所限定的粗粒度几何约束,主要表现为点、线、面、体等几何要素间的邻接及边界关系。几何要素关系的定性描述主要包括相容、相交、相离和相接四种类型。拓扑关系约束单元如表1所示。
零件构成单元可以通过多个拓扑关系约束确定与其他单元的相对位置。这种结构性连接关系一方面保证了特定功能的实现,另一方面用以保证零件结构的稳定性。
2.2.2 形位关系约束
零件功能是通过对一系列离散的子特征单元进行有目标的选择,并按照特定的位置关系进行组合而实现的。功能约束间接作用于子特征单元的组合过程形成了形位关系约束。

图6 功能约束单元模型Fig.6 Functional constraint unit model
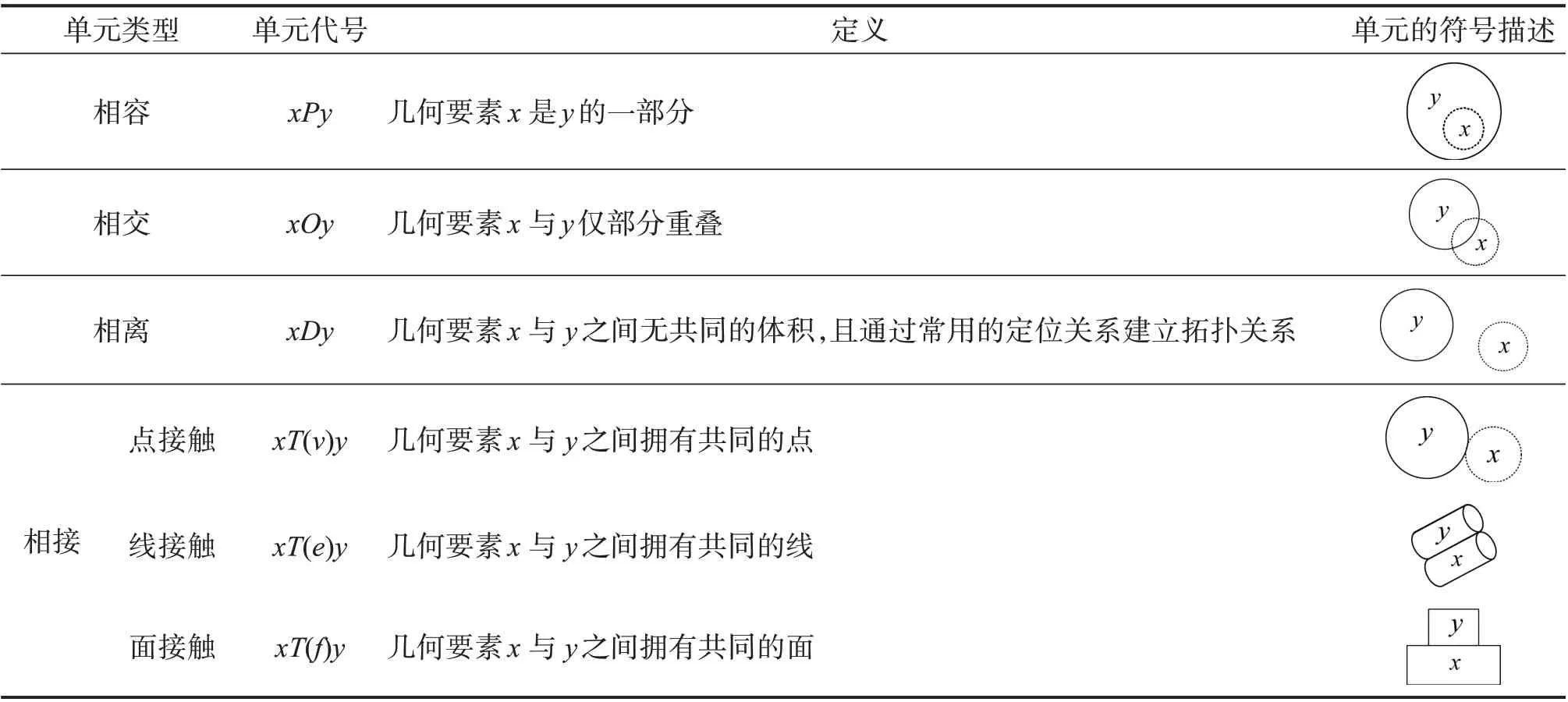
表1 拓扑关系约束单元Table 1 Topological relationship constraint unit
子特征单元间大多是通过面来连接的。因此,形位关系可以通过相关连接特征的类型及其之间的几何连接关系来定义。在设计过程中,通常用重合、平行、垂直、偏距、角度配合和投影等描述子特征单元间的形位关系约束;约束作用的对象是零件几何拓扑元素,主要为点、线、面等低层次几何信息。形位关系约束单元如表2所示。其中:VM代表点,LM代表线,FD、FM均代表面;n1、n2为平面的法向量;θ、L分别为2个几何对象之间的夹角和偏距。
3 零件多域视图模型
每一复杂零件都承载着多层次、多领域的几何信息和非几何信息。为完整表达零件设计状态的转换过程,根据零件特征信息表达的层次和表述需求,从不同的刻画角度,将零件视图模型自顶向下、渐进地分解为功能视图模型、功能结构过渡视图模型、结构约简视图模型和结构视图模型,并基于前述的功能约束模型和结构约束模型对上述各视图模型进行描述。
3.1 功能视图模型
功能视图模型抽象化地表达零件的功能特征,其逻辑结构决定了零件的基本行为和结构构成,是零件功能特征在视图模型上的聚合体。基于零件各功能约束单元的时序和逻辑关系可建立零件的功能视图模型。
按知识类型的不同,功能的形式化表达方法分为3种,即输入输出流表示法、动词-名词表示法和关键字表示法[22]。由于目标功能决定了零件的关键结构特征,是零件功能求解的核心,因此其形式化表达是功能视图模型的主体部分。结合输入输出流表示法和关键字表示法,将关键字Pn作为表达功能的谓语连词,用于表达诸如支撑、连接等基本功能单元。按照零件功能单元间的输入输出逻辑关系,对各基本单元按时序和逻辑关系进行组合,构成功能约束单元。采用工序图描述零件的功能单元及其组合关系,形成零件功能视图模型,如图7所示。图5所示支架的功能视图模型如图8所示。
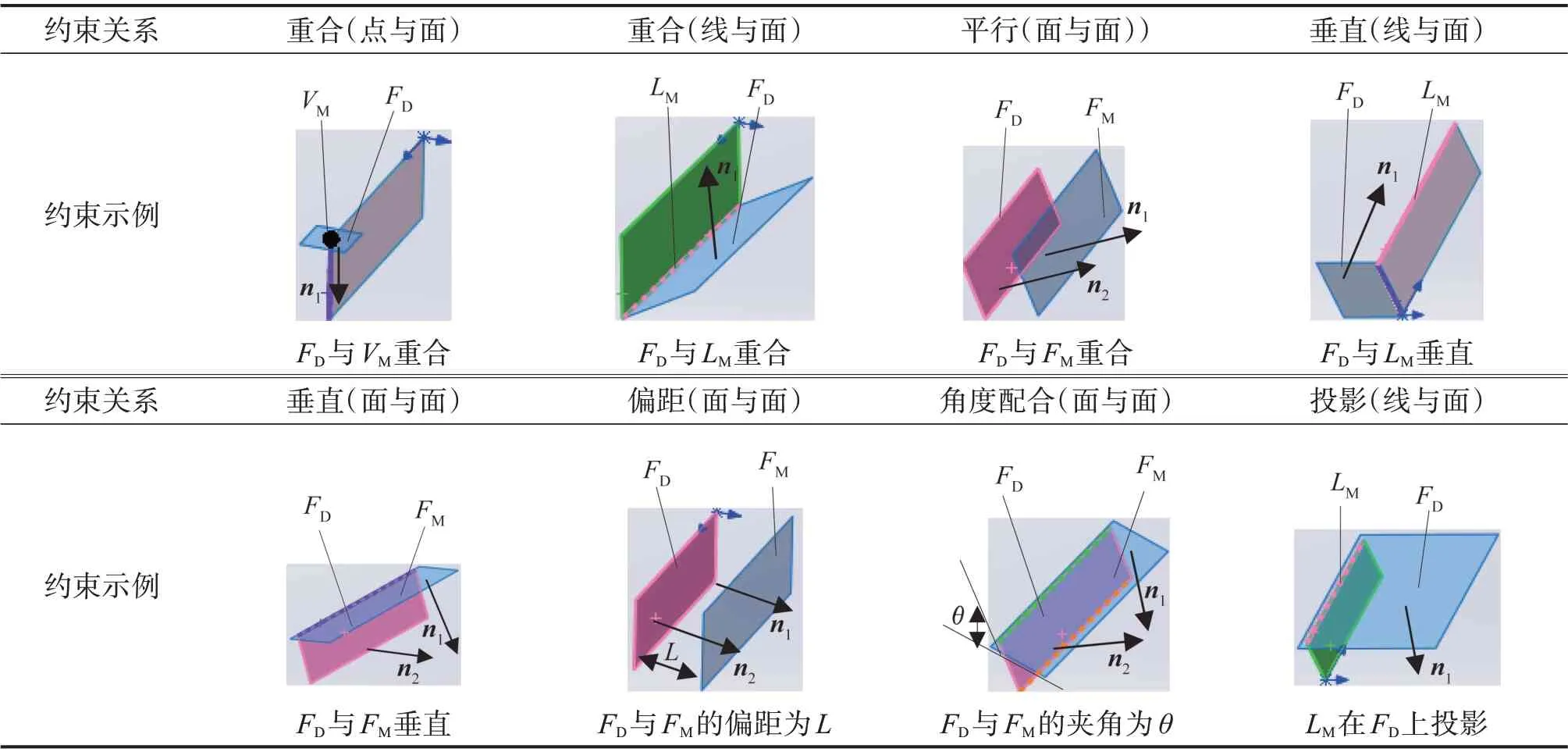
表2 形位关系约束单元Table 2 Shape and position relationship constraint unit
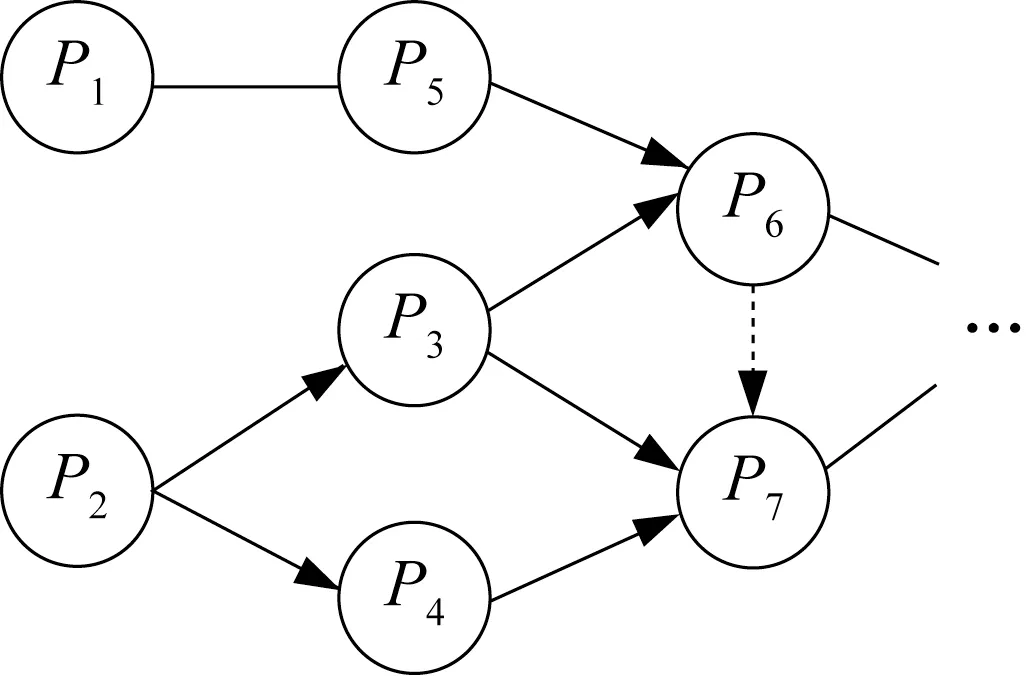
图7 零件功能视图模型Fig.7 Part function view model

图8 支架的功能视图模型Fig.8 Functional view model of bracket
复杂机电系统的功能存在较强的耦合关系,须通过功能分析和分解建立其功能视图模型。为便于通过功能单元的组合低成本地满足零件多样化和个性化需求,功能视图模型的功能单元须满足下列要求:
1)功能单元数量适中,且功能单元之间具有尽可能小的耦合性。
2)功能单元之间的接口设计尽量做到标准化。
功能视图模型包含了零件的功能信息及隐含于各单元的几何、拓扑和约束信息,是零件功能载体的抽象表达。它既表达了功能单元的聚合特征、相对固定的邻接关系,也隐含零件结构生成的属性约束。
3.2 功能结构过渡语义描述模型
功能视图模型从目标功能的角度,描述了零件功能单元的时序和逻辑关系。以功能视图模型为基础,增加功能单元形位关系约束,建立功能结构过渡语义描述模型。
以支架为例,功能结构过渡语义描述模型如图9所示。
首先,根据零件功能视图模型所描述的功能单元及其关联信息,抽取各功能单元所隐含的几何特征信息,形成零件抽象的功能结构属性;然后,定义各抽象物理结构之间的形位约束关系,通过关联形位约束建立功能与几何特征间的转换关系,从而形成零件功能结构过渡语义描述模型。形位关系约束是一种结构约束,因此功能结构过渡语义描述模型是零件功能模型到结构模型之间的一种过渡模型。
功能结构过渡语义描述模型是根据零件的功能特点和特定的物理需求构建的、用于描述零件构成单元抽象物理结构和几何特征信息的零件模型。该模型既可用于表达设计意图,又可对产品结构模型加以抽象描述,是一种零件结构的骨架模型。
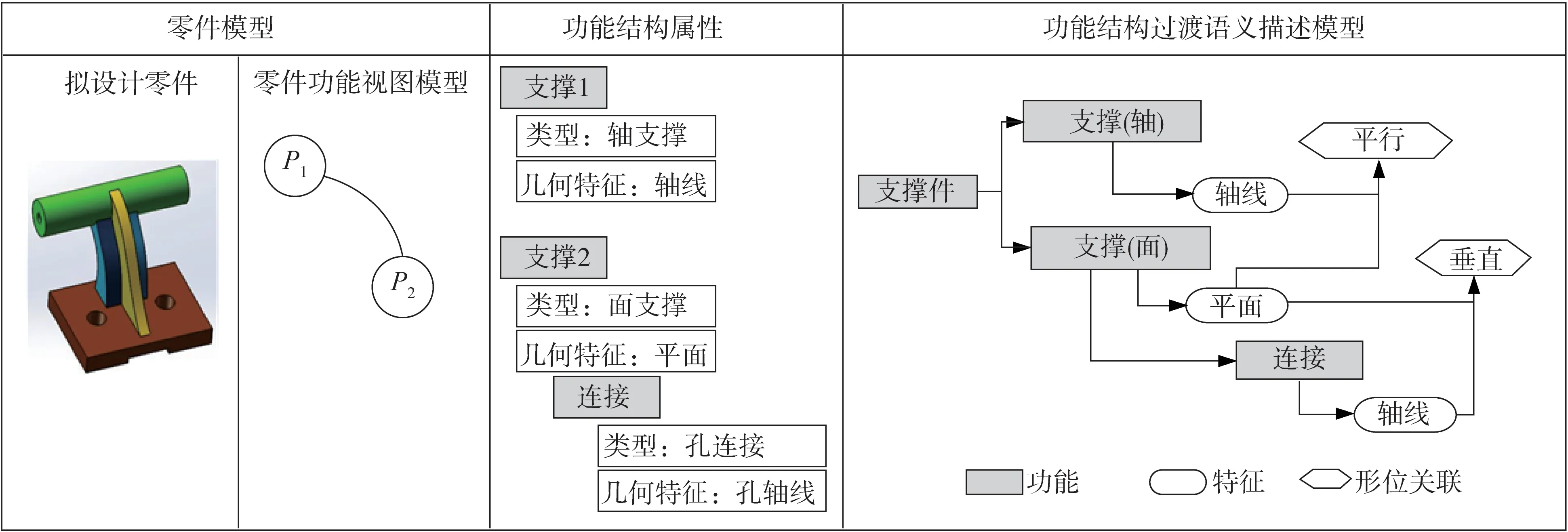
图9 支架的功能结构过渡语义描述模型Fig.9 Semantic description model of function structure transition of bracket
3.3 结构约简视图模型
功能结构过渡语义描述模型从语义表达的角度对单元间结构约束信息进行了描述。对功能结构过渡语义描述模型进行图形化表达,即可建立结构约简视图模型。
零件可视为具有一定结构约束的功能表面的集合。从功能表征的角度,零件的设计及功能特征可进一步表征为功能表面的名义特征,即组成功能表面的参考点、参考直线或参考平面等最小几何基准要素的集合[23]。将功能结构过渡语义描述模型所表述的零件骨架模型进行基于功能表面及其名义特征的实例化处理,从零件实现功能的最基本原理出发,抽取它们结构上的本质特征,图形化显示零件功能对象及其结构的关键信息,形成结构约简视图模型。
支架的结构约简视图模型如图10 所示。首先,基于其功能结构过渡语义描述模型所描述的几何特征信息,确定各功能单元的名义特征;在此基础上,基于形位关系约束和位置特征信息,建立名义特征间的形位关系,并进行图形化表述,形成结构约简视图模型。图10中,分别用y、z表征轴支撑与面支撑在Y、Z方向的中心偏距。该模型规定了零件各构成单元的结构特征,以及各单元工程语义约束的关系和空间位置关系,并进行了一定的简化,摒弃了零件的次要功能。
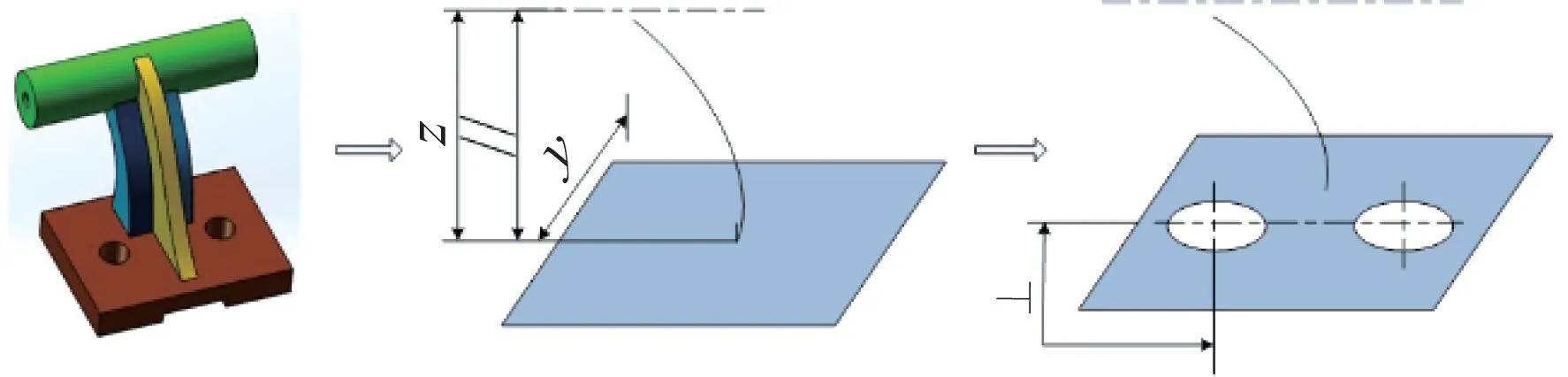
图10 支架的结构约简视图模型Fig.10 Structure reduction view model of bracket
显然,结构约简视图模型是从零件模型中抽象出功能零件的核心组成部分而构建的,体现了系统解的原理和结构布局,但对零件构成单元的几何特征及其边界没有严格的限定。
3.4 结构视图模型
对结构约简视图模型的每一个名义特征进行结构扩展,同时对相应的形位约束进行几何约束求解。即将功能要求所定义的零件设计特征及其对应的功能表面名义特征映射为物理载体,根据一定的算法求解出满足约束的几何图形;在此基础上,根据零件结构单元之间几何和拓扑关联信息的邻接位置,确定几何边界;定义结构单元之间的拓扑约束关系,如相容、相交、相离和相接等,将结构约简视图模型从空间维度进行扩展,构建零件的结构视图模型。支架的结构视图模型如图11所示。
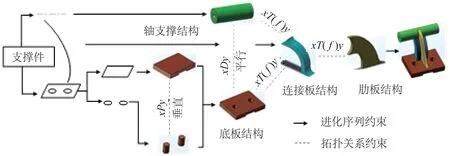
图11 支架的结构视图模型Fig.11 Structural view model of bracket
在结构视图模型中,零件构成体素特征可分为设计特征和关联特征两类。设计特征是根据零件的功能属性生成的、实现特定功能的相关结构的聚集,其组合形式和关键参数信息在结构约简视图模型中已有明确的定义,如图11中的底板与轴支撑。关联特征用于连接设计特征,它依赖于设计特征而存在,并通过关联约束实现相邻设计单元的组合,体现了零件的结构特性,如图11中的连接板和肋板。
4 基于多域视图模型的零件结构设计
从功能视图模型、功能结构过渡语义描述模型、结构约简视图模型至结构视图模型的设计过程中,零件的结构信息逐步扩展,其设计状态体现为一种递进的转换过程。在这一过程的每一阶段,零件模型的信息都是不完整的,因此其所对应的零件结构就可以形成多重解释,在此基础上可实现零件的变型和系列化设计。
4.1 基于功能视图模型的零件结构多重解释
不改变功能视图表示的基本功能(即不改变功能视图的基本结构),通过变更其构成单元的目标功能信息,即可构建多种形式的零件结构,形成基于功能视图模型的零件结构多重解释。如图12所示,针对支架功能视图模型的基本结构,通过变更组成模型功能单元的关键字P1或P2,即可形成不同的零件结构。

图12 基于功能视图模型的零件结构多重解释Fig.12 Multiple interpretations of part structure based on functional view model
4.2 基于功能结构过渡语义描述模型的零件结构多重解释
当功能视图模型确定后,构成零件的基本功能单元及其之间的时序和逻辑关系已唯一确定,因此,在建立功能结构过渡语义描述模型时,对功能单元所进行的语义描述具有唯一性。但该模型中还包含为完成特定功能所定义的一些抽象结构信息、语义及形位关联信息,对这些信息进行不同的释义会得到不同的设计结果,从而形成零件结构的多重解释。如图13所示,不改变支架的基本功能语义,当将其抽象几何特征的形位关联信息由平行变更为相交或垂直时,零件的结构就变更为①或②的形式。
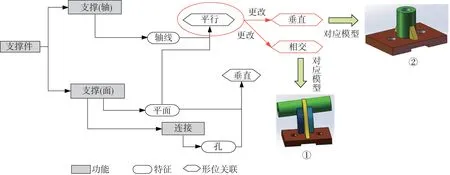
图13 基于功能结构过渡语义描述模型的零件结构多重解释Fig.13 Multiple interpretations of part structure based on semantic description model of functional structure transition
4.3 基于结构约简视图模型的零件结构多重解释
根据功能结构过渡语义描述模型所传递的信息,在结构约简视图模型中,对完成目标功能的功能表面及其名义特征、名义特征之间工程语义约束的关系和定性空间形位关系的定义具有唯一性。但从定量的角度看,特征之间的定位关系具有可扩展性,对其进行不同的定义会形成零件结构的不同解释。如图14(a)所示,对支架P1、P2功能的几何特征定量位置关系的描述为x=0,y≠0,z≠0;当将这种定量位置关系改变为x=0,y≠0,z=0 或者x=0,y=0,z≠0时,零件结构则可变更为图14(b)和图14(c)所示的结构。
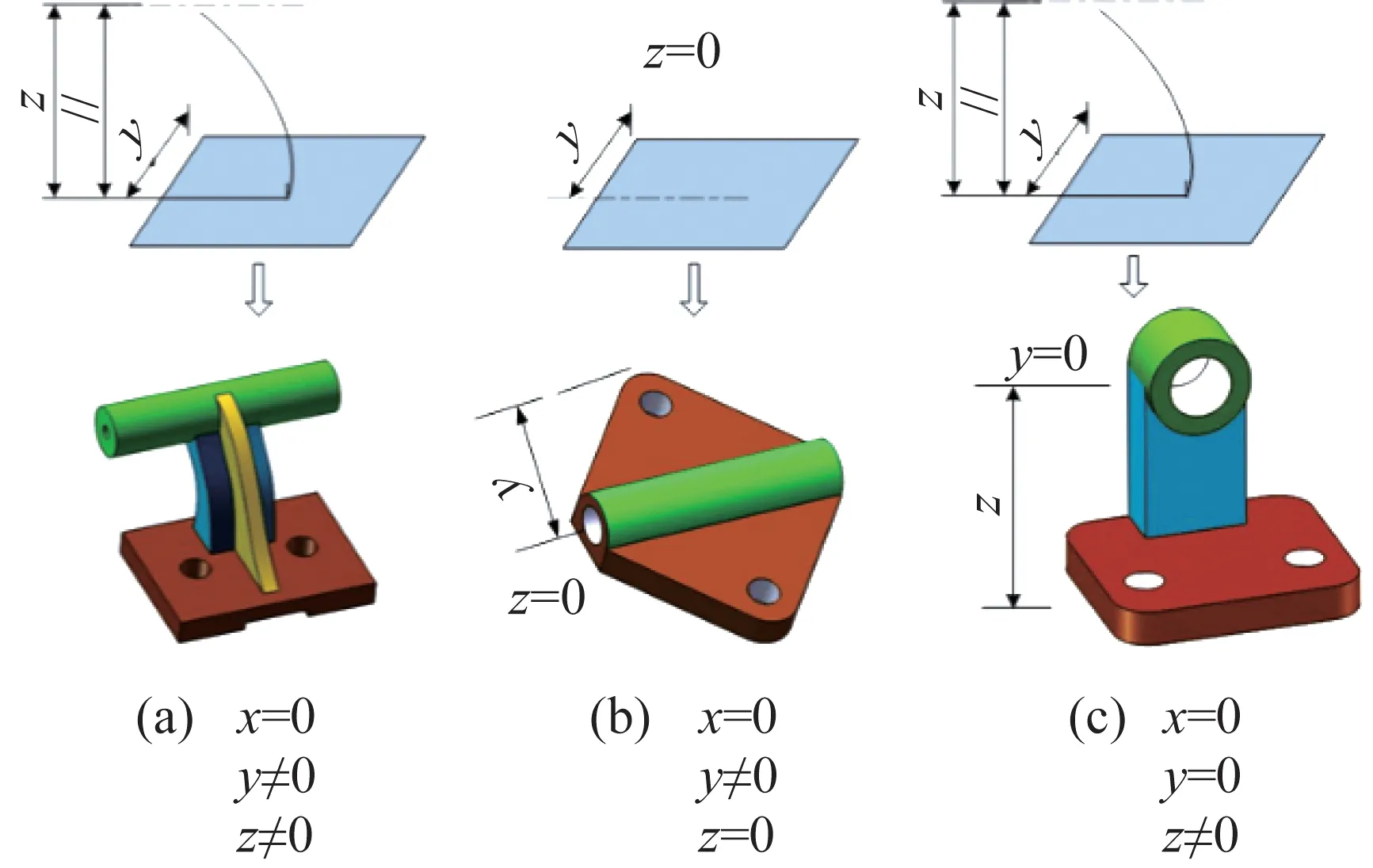
图14 基于结构约简视图模型的零件结构多重解释Fig.14 Multiple interpretations of part structure based on structure reduction view model
4.4 基于结构视图的零件结构多重解释
结构约简视图模型体现了零件系统解的原理和结构布局。建立零件结构视图模型时,通过对零件构成单元的几何特征及其边界,以及零件结构单元之间几何和拓扑关联信息的求解,可产生不同的特征,形成零件结构多重解释。如图15所示,支架的原始结构如①所示,当改变其底板及其附属孔的几何特征时,①可变更为②、③;当将底板与孔的拓扑关系约束由xPy变更为xT(f)y时,结构①可变更为④;同理,结构①也可变更为⑤。
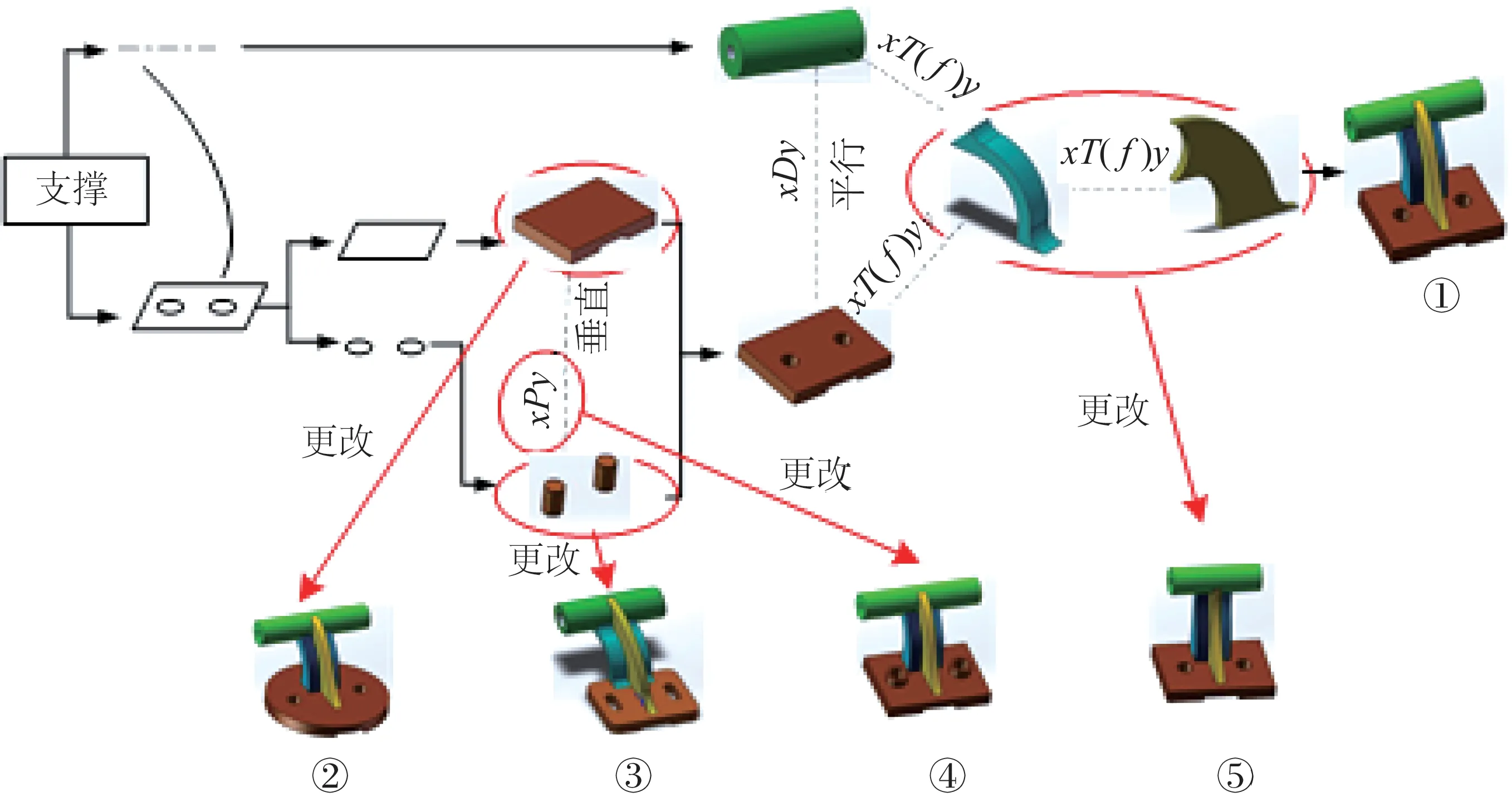
图15 基于结构视图模型的零件结构多重解释Fig.15 Multiple interpretations of part structure based on structure view model
5 应用实例
拟设计一导向平移机构,使得其中的一个零件能够实现沿特定方向的平移。
5.1 导向平移机构的结构设计
导向平移机构的功能描述如图16所示。其中导向机件和移动零件的主体几何结构特征均为回转体,要求移动零件的轴线a2与导向机件的轴线a1同轴,且零件能够沿a1作轴向平移。

图16 导向平移机构的功能描述Fig.16 Function description of guide translation mechanism
将导向平移机构的功能信息进一步规范化表示,可得其功能视图模型,如图17所示。对于移动零件,其子功能R2是一种基于导向功能R1的平移运动,因此两者之间形成串行有序列功能约束;对于导向机件,导向功能Q2与固定功能Q1为具有同等地位的2个功能,因此两者之间形成并行无序列功能约束。
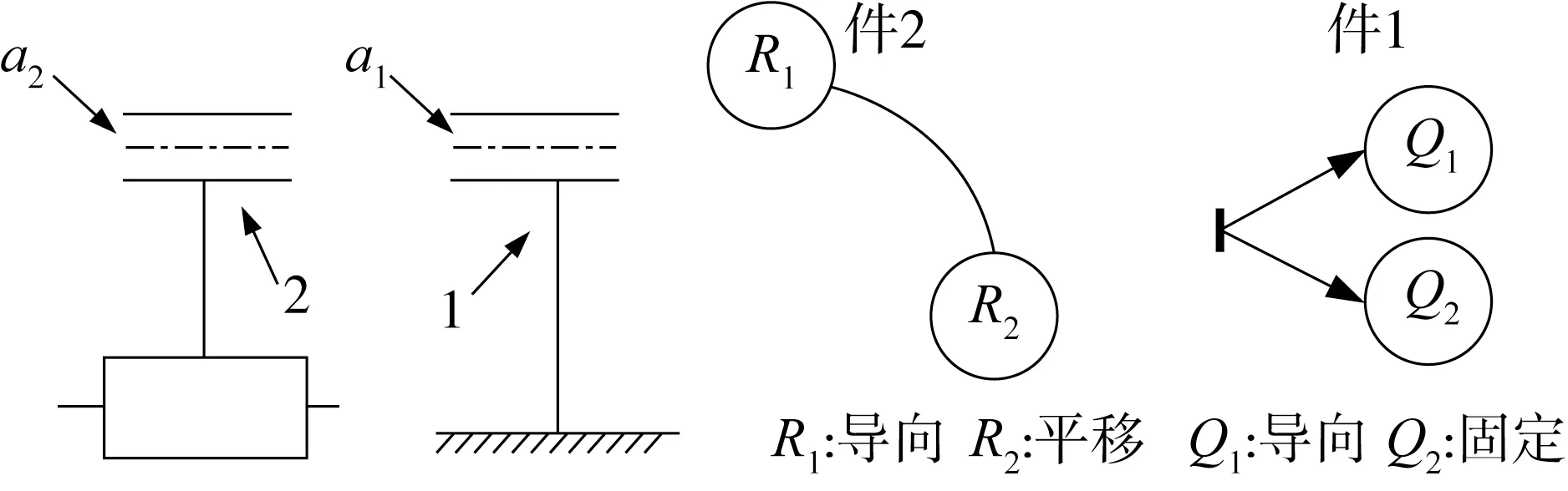
图17 导向平移机构的功能视图模型Fig.17 Functional view model of guide translation mechanism
以移动零件为例。根据导向平移机构功能视图模型所描述的关联信息,以及各功能单元所隐含的几何特征信息,确定导向及平移两个功能单元的功能结构属性;在此基础上,定义单元之间的形位约束关系,形成移动零件的功能结构过渡语义描述模型,如图18(a)所示。对其功能结构过渡语义描述模型进行基于功能表面名义特征的扩展,形成结构约简视图模型,图18(b)所示。对其每一名义特征进行结构扩展,形成结构视图模型,如图18(c)所示。在此基础上,可进一步生成其结构模型,如图18(d)所示。

图18 基于多域视图模型的移动零件的设计过程Fig.18 Design process of mobile part based on multi-domain view model
在移动零件的设计过程中,根据其功能描述以及在结构模型生成过程中所形成的几何与形位约束关系,可以很直观地确定零件的几何公差等技术要求,从而生成其完整的结构模型,如图19所示。对应地,可生成移动零件的装配结构,如图20所示。
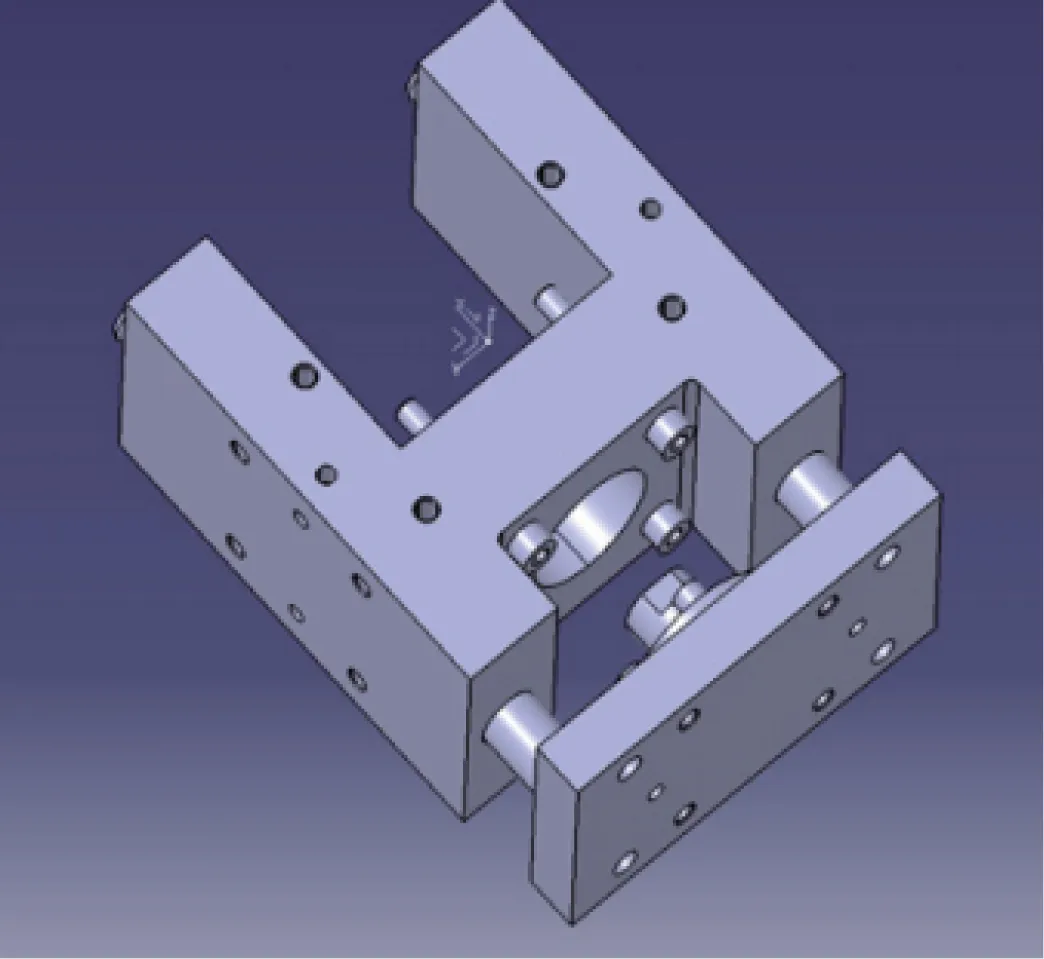
图20 移动零件的装配结构Fig.20 Assembly structure of mobile part
5.2 零件结构的多重解释
保持移动零件基本功能R1、R2不变,在移动零件建模的基础上,分别进行基于功能结构过渡语义描述模型、结构约简视图模型以及结构视图模型的多重解释,可以形成不同的产品结构,如图21所示。
1)对如图18所示的零件多域视图模型,进行基于结构约简视图模型的多重解释,将z≠0 转换为z=0,则可生成夹持机构,如图21中①所示。
2)对图21的①进行基于功能结构过渡语义描述模型的多重解释,则可生成举升小机构,如图21中②所示。
3)对图21的②进行基于功能结构过渡语义描述模型以及结构视图模型的多重解释,可生成五轴调节机构,如图21的③所示。
4)对图21的③进行基于功能结构过渡语义描述模型的多重解释,可生成滑台升降机构,如图21中④所示。
5)对图21的③、④进行基于功能结构过渡语义描述模型的多重解释,可生成双向伸缩货叉机构,如图21中⑤所示。
6)对图21的⑤进行基于结构视图模型的多重解释,可生成间隙升降平台机构,如图21中⑥所示。
5.3 讨论
从上述实例可以看出,通过多域视图可建立零件从功能到几何结构的完整过渡模型。在这一设计模式下,在需求设计和概念设计阶段所处理的语义信息以及工程领域的设计原理、工程知识等,通过功能视图模型、功能结构过渡语义描述模型、结构约简视图以及结构视图模型的层级递进,逐步融入零件几何模型中,使得零件几何模型不断丰富,呈现为设计状态不断递进演化的过程。在此基础上,可完成其结构设计,形成从设计方案产生、语义到结构信息的转化直至零件结构的设计过程,实现概念设计与结构设计的有机集成。
6 结 论

图21 基于多域视图模型的零件结构多重解释Fig.21 Multiple interpretations of part structure based on multi-domain view model
1)零件的功能和结构在一定范畴内往往是动态的,具有多状态性。传统的零件建模方法未考虑零件的这种多状态性,使得这些方法难以对复杂系统中具有多功能性的零件进行精准建模。通过构建多域视图模型,定义了零件从功能到结构的规程化的演化过程,形成了一个具有过程性、动态性、层次性和递进演化特性的零件对象定义模型。
2)在不改变原有零件基本功能框架的前提下,通过对零件各视图模型中基本设计需求以及对其蕴含信息的挖掘,可获取表达零件几何信息和非几何信息的多重解释;通过改变原有基本模型局部结构的配置形式或者配置参数,可得到具有不同结构的零件,进而可以通过对几何特征及特征约束的编辑操作更新模型,甚至更新零件的功能,从而驱动零件的变异设计,实现基于模型的零件结构动态更改和系列化设计。
3)零件设计涉及功能、结构等大量领域知识。通过零件多域视图模型的构建,将设计过程中功能的流向性、连续性等顶层抽象特性集成于零件建模过程,实现功能和结构信息在装配结构以及几何形位约束特征之间的有效传递。这些信息的传递,一方面有助于实现零件结构的有序进化,另一方面提供了在零件详细设计阶段设计参数的传递方式以及尺寸及形位公差的定义规范,扩展了狭义的零件结构设计的范畴,有助于实现基于模型的计算机辅助零件设计,推进产品设计过程的自动化。
