光纤陀螺脱骨架光纤环温度性能研究
2021-06-25刘海锋谭满清张学亮于中权尚艳玲
刘海锋 ,谭满清 ,张学亮,于中权,尚艳玲
(1. 中国科学院半导体研究所集成光电子国家重点实验室,北京100083;2. 中国科学院大学材料科学与光电工程中心,北京100049;3. 湖南航天机电设备与特种材料研究所,长沙410205)
光纤环圈是光纤陀螺敏感角速率的核心元件,光纤环圈的温度性能直接决定光纤陀螺的温度漂移性能.Shupe[1]最早提出如果一段光纤受时变的温度扰动,除非这段光纤在光纤环中间,否则正反传播的两束光会由于温度扰动引入非互易相位差.Frigo[2]提出采用特殊绕法可以大大减小温度扰动的非互易误差.Mohr[3]采用温度模型对各种光纤环绕法进行分析和试验对比验证,证明了四极对称绕法是抑制Shupe温度效应的最佳手段.在后续的光纤陀螺工程化中采用四极对称以及衍生的八极、十六极等对称光纤环绕法可以有效消除温度扰动引起的Shupe效应.李绪友等[4]通过十六极绕环径向和轴向温度模型仿真分析,证明十六极绕法可以更好地抑制Shupe效应.但由于光纤绕环的非理想性,残余温度效应影响仍然不可忽略,成为制约光纤陀螺迈向更高精度和批产成品率的重要因素.宋凝芳等[5]和于中权等[6]建立了结构、材料多参量模型对光纤环Shupe效应误差进行了分析,从光纤环综合导热系数、轴向热场分布和径向热学设计方面提出了有效建议.赵小明等[7]、李茂春等[8]和卓超等[9]采用多维温度场模型,分析了轴向、径向、周向的温度不均引起的相位误差,并采用试验验证了模型的有效性,指导了光纤陀螺工程设计.
当前光纤环温度误差仍然是光纤陀螺的主要误差源,在近几年的实际工程应用中,光纤陀螺采用脱骨架光纤环,相比有骨架光纤环大大改善了光纤陀螺的温度性能.本文基于Shupe效应的理论模型,采用有限元分析的方法,从脱骨架光纤环应用和光纤陀螺产品实际工况出发,重点分析了使用脱骨架光纤环光纤陀螺内部热源和外部热源对光纤陀螺误差的影响,以及光纤环在不同热传导效率下的误差特性,对光纤环及光纤陀螺工程化具有重要的工程指导意义[10-12].
1 Shupe效应原理
Shupe效应[1]指出,假设沿着光路存在着一个随时间变化的温度梯度,光路中就会产生热致非互易相移.当两束沿相反方向传输的光波在不同时刻经过光纤环中的同一路段时,由于温度梯度的影响就会产生非互易相移.这个非互易相移叠加在由Sagnac效应产生的非互易相移中,从而影响光纤陀螺精度.
Shupe效应如图1所示,在光纤环中,距离O点z处温度扰动引起的非互易位相差微元,即相移微元为

式中:λ是光波长;c是真空中的光速;n是光纤折射率;∂n/∂T是光纤折射率温度系数;dT(z,t)/dt是温度变化率;L是整个光纤线圈长度.

图1 Shupe 效应示意Fig.1 Schematic of Shupe effect
式(1)表明温度扰动引起的非互易相位差微元与该段光纤的温度变化率和位置有关的权因子成正比.非对称扰动点距离光纤环中点越近,扰动引起的光路非互易相位差越小,当扰动点正好在光纤环中点时,扰动引起的非互易相位差为0;如果相对光纤环中点对称的两段光纤上的温度扰动相同,则温度变化引起的相位差被抵消.
2 光纤陀螺热场分析
以某型光纤陀螺为例,图2为脱骨架光纤环外形图,图3为带磁屏蔽结构的脱骨架光纤环外形图.外部热源和内部热源通过上盖、主控板、波导盘、光纤环、底座对光纤陀螺施加作用.
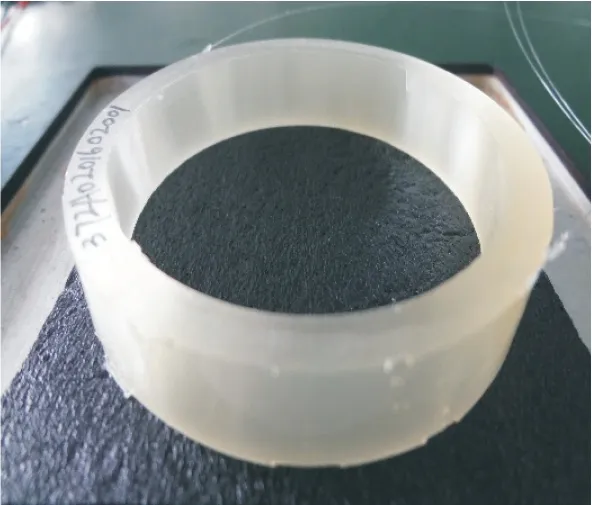
图2 脱骨架光纤环Fig.2 Photo of de-skeleton fiber coil
当光纤陀螺外部环境没有明显的温度变化时,光纤陀螺工作主要受内部热源影响,假设光纤陀螺工作在常温22℃,光纤陀螺工作时功率为3W,光纤陀螺内部发热部件主要为主控板.内部热源引起的温度变化仿真如图4所示.
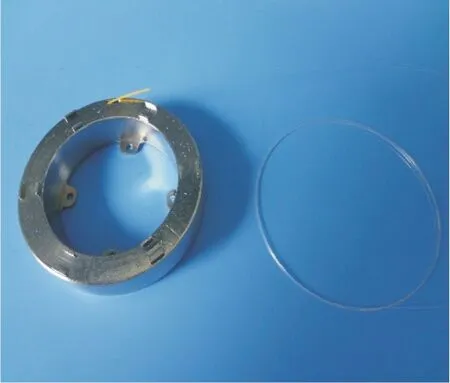
图3 带磁屏蔽的脱骨架光纤环Fig.3 Photo of de-skeleton fiber coil with magnetic shield
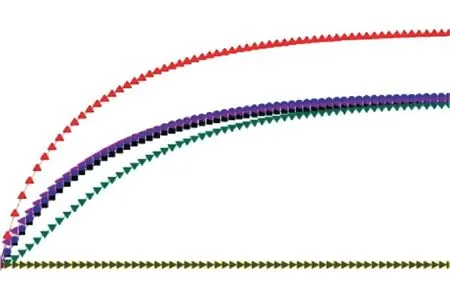
图4 光纤陀螺内部热源温升仿真Fig.4 Simulation of temperature rise of fiber optic gyroscope caused by internal heat source
瞬态温差表征了某点的温度梯度指标,取时间步长为1s,内部热源造成的光纤环中径向、轴向和周方向的瞬态温差作比较,如图5所示,其轴向瞬态温差最大值较大为|∆T(z)|=1.113℃,径向和周向瞬态温差最大值较小,分别为|∆TR|=0.0305℃,|∆Tφ|=0.005℃.
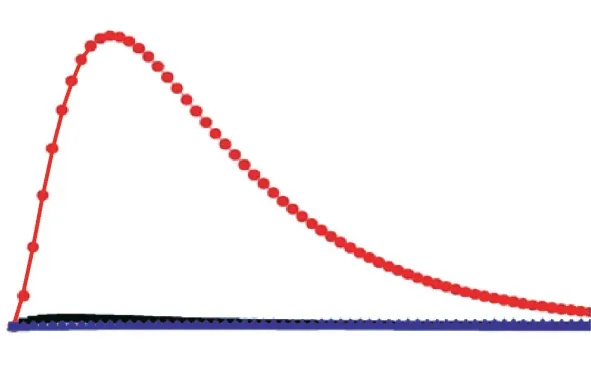
图5 光纤陀螺内部热源温度梯度仿真Fig.5 Temperature gradient simulation of fiber optic gyroscope caused by internal heat source
当光纤陀螺工作在-40~60℃温变环境中时,设温变速率为1℃/min.根据有限元建立的光纤陀螺温度模型显示光纤陀螺随时间推移的瞬时温度变化如图6所示,光纤陀螺内部各部件温度变化基本与外部温度变化保持一致.径向、轴向和圆周方向的瞬态温差如图7所示,轴向的瞬态温差较大.

图6 光纤陀螺外部热源影响下瞬时温度仿真Fig.6 Instantaneous temperature simulation of fiber optic gyroscope caused by external heat source
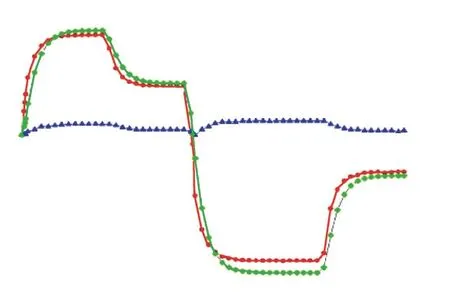
图7 光纤陀螺外部热源影响温度梯度仿真Fig.7 Temperature gradient simulation of fiber optic gyroscope caused by external heat source
3 光纤陀螺内部外部热源对光纤环影响分析
根据Shupe效应原理,采用有限元方法以位置z为变量,在设定的温度变化条件下,计算光纤环中每个微元的温度梯度,仿真获得光纤环整个光纤长度上的各个微元由于设定温度变化率引起的非互易相位变化量,然后计算获得整个光纤环累积的温度非互易相位误差,并折算成光纤陀螺的输出误差.对只有内部热源作用和有外部热源作用的光纤陀螺进行温度漂移误差进行计算仿真,设定光纤环绕制方法为四极对称绕法,表1为光纤环相关材料的仿真参数[13].
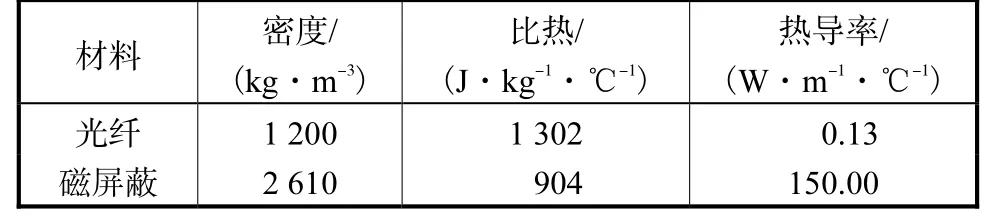
表1 光纤环相关材料参数Tab.1 Material parameters of the fiber coil
3.1 内部热源影响分析
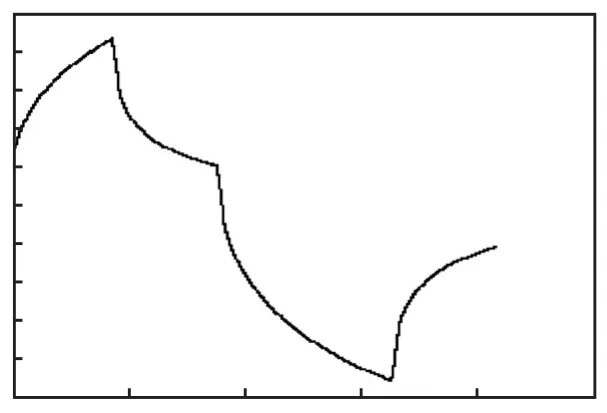
当只考虑内部热源作用时,假设环境温度为22℃,首先采用有限元分析软件ANSYS计算光纤环上各单元点随温度的输出变化,计算结果取7000s,分析结果如图8所示.结果显示,随着时间的增加,光纤陀螺的输出趋于稳定,光纤陀螺零偏极差约为2°/h,光纤陀螺内部热场的影响主要表现为启动一段时间内的温度漂移误差较大,温度平衡后光纤陀螺温度漂移误差减小.然后将光纤陀螺放于22℃常温下进行通电测试,通电7000s的测试结果如下:光纤陀螺零偏极差约为1°/h,光纤陀螺启动100s内温度漂移误差较大,随着时间推移,温度漂移误差趋于稳定,试验结果与仿真结果一致.实际工程中如果进一步改善光纤环的绕制对称性,可进一步降低启动过程中的光纤陀螺温度漂移误差.
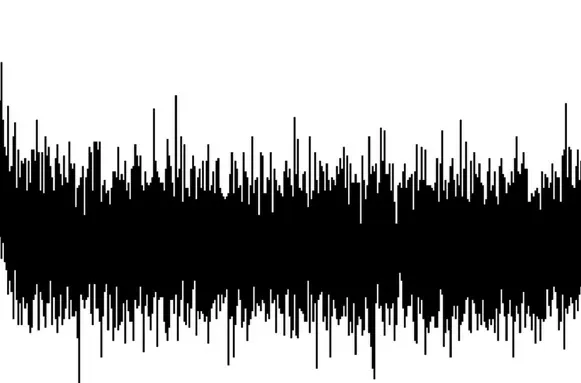
图8 常温条件下光纤陀螺通电实测数据Fig.8 Output data of fiber optic gyro measured under normal temperature
3.2 外部热源影响分析
假设将光纤陀螺置于温变环境中,首先从常温以1℃/min速率降到-40℃,保温1h,然后以1℃/min速率升到60℃,并且保温1h.光纤陀螺主要表现为外部热源影响.首先采用有限元分析软件ANSYS对光纤环进行热分析,光纤陀螺在-40~60℃下的零偏极差约为1.2°/h,将光纤陀螺置于温箱中,进行-40~60℃温度测试,零偏极差约为2°/h.光纤陀螺实际在外部热源影响下的零偏极差与仿真结果的差别主要与光纤环的绕制不理想相关.
由上述结果可知,光纤陀螺工作在常温环境下保持外部环境温度不变时,光纤陀螺主要受内部热源影响,主要影响光纤陀螺启动时间指标.当光纤陀螺外部环境温度随时间变化时,光纤陀螺主要受外部热源影响,主要影响光纤陀螺的零偏极差指标.提高光纤环绕制的对称性,可进一步降低光纤陀螺受内部外部热源的影响,提高光纤陀螺启动性能,降低全温工作漂移误差.
3.3 非均匀热源影响分析
当光纤环为非理想四极对称绕制,假设温度扰动集中作用于光纤环上的不同区域,产生的漂移误差不相等.根据Shupe效应,以非均匀热源集中作用在光纤环理论中点偏移一定角度的某点为模型,考虑对光纤陀螺零偏的影响进行仿真分析.温度变化范围-40~60℃,温变速率为1℃/min,仿真过程中分别设定热源点与光纤环中心的夹角分别为180°、150°、120°、90°、60°、30°、0°、-30°、-60°、-90°、-120°、-150°,计算每种情况的光纤陀螺输出零偏极差,图9为热载荷点与光纤环中心的偏离示意.
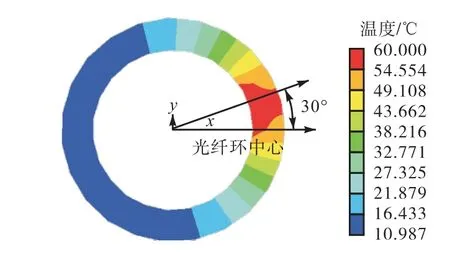
图9 热载荷点与光纤环中心的偏离示意Fig.9 Schematic of deviation of thermal excitation point from the optical fiber coil center
当热源与光纤环中心重合时,引入的零偏极差最小,如表2所示.当热载荷与光纤环中心夹角约为120°和-120°时,所引入的零偏极差最大.因此,在光纤陀螺设计过程中及光纤陀螺应用过程中,应尽量保证内部热源和外部热源与光纤环的实际中点保持对称,此时产生的Shupe效应误差最小.
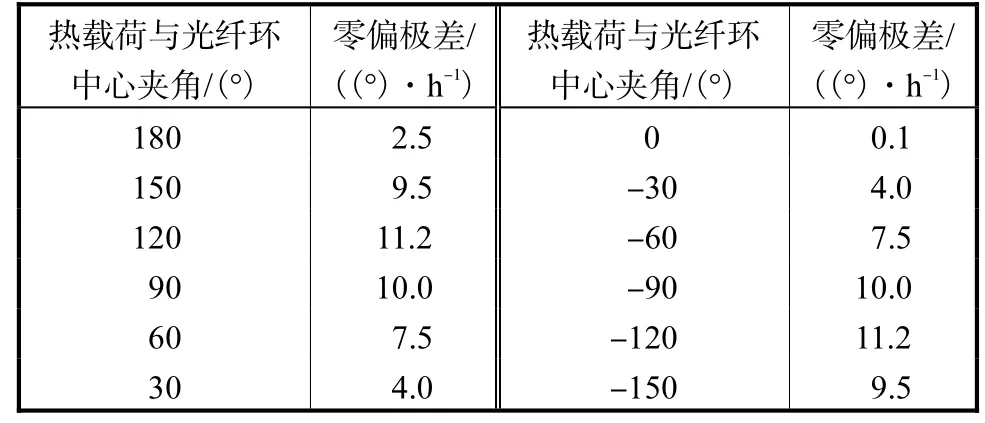
表2 热载荷相对光纤环中心的偏离程度与光纤环零偏关系Tab.2 Relationship between thermal load deviation from fiber coil center and fiber coil zero offset
4 脱骨架光纤环外部介质热导率影响分析
脱骨架光纤环一般采用紫外固化胶或热固化胶,实现光纤环绕制过程的固化和与磁屏蔽件的黏接.假设热源均匀施加于磁屏蔽件,磁屏蔽件下方与光纤环黏接,热源以磁屏蔽件热传导方式影响光纤环,如图10所示.脱骨架环外部热导率主要考虑光纤环与磁屏蔽件黏接部分介质热导率,设定介质热导率分别为0.01W/(m·℃)、0.03W/(m·℃)、0.13W/(m·℃)、0.30W/(m·℃).热导率为0.01W/(m·℃)时光纤陀螺输出零偏误差如图11所示,不同热导率下光纤陀螺输出的零偏误差结果如表3所示.
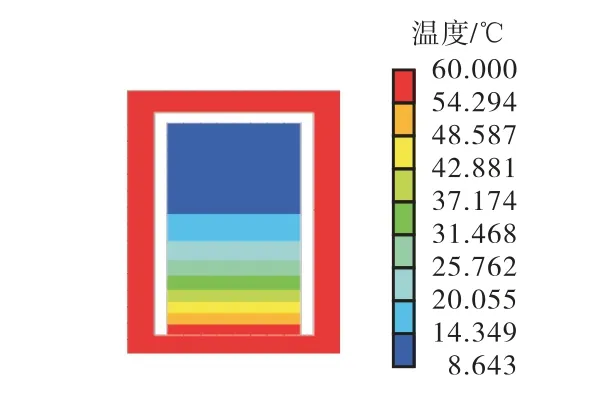
图10 热激励下磁屏蔽和光纤环瞬时温度仿真Fig.10 Simulation of instantaneous temperature of magnetic shield and optical fiber coil under thermal excitation
?
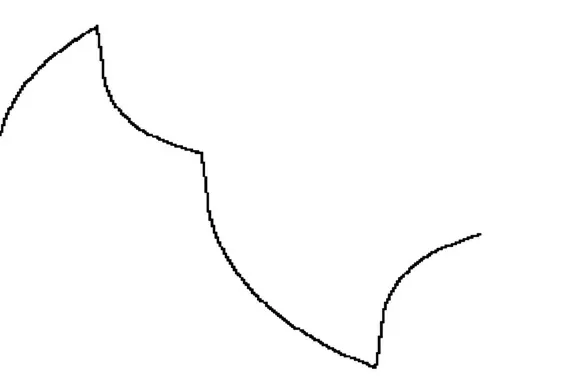
图11 热激励下光纤陀螺输出误差(热导率为0.01 W/(m·℃)时)Fig.11 Output error of fiber optic gyroscope under thermal excitation(when thermal conductivity is 0.01 W/(m·℃))

表3 不同光纤环热导率下光纤陀螺输出零偏极差Tab.3 Output bias of fiber optic gyroscope under different thermal conductivities of fiber ring
由表3可知,热导率由0.01W/(m·℃)增加到0.30W/(m·℃)时,光纤环对应的零偏极差由0.9°/h增加为1.9°/h.
设定光纤环的隔热层材料的热导率分别为0.01W/(m·℃)、0.03W/(m·℃)、0.10W/(m·℃).结合光纤环在磁屏蔽件里的缓冲空间,设计隔热层的厚度分别为0mm、0.135mm、0.270mm、0.500mm、1.000mm、2.000mm、4.000mm、6.000mm,然后计算光纤环在施加温度激励,温度变化范围-40~60℃,温变速率为1℃/min,光纤陀螺的零偏极差变化规律,结果见表4,隔热层为6mm,热导率为0.01W/(m·℃)时零偏极差最小.
结果表明,较低的热导率和采用较厚的隔热方案可以明显改善热源对光纤环的影响.
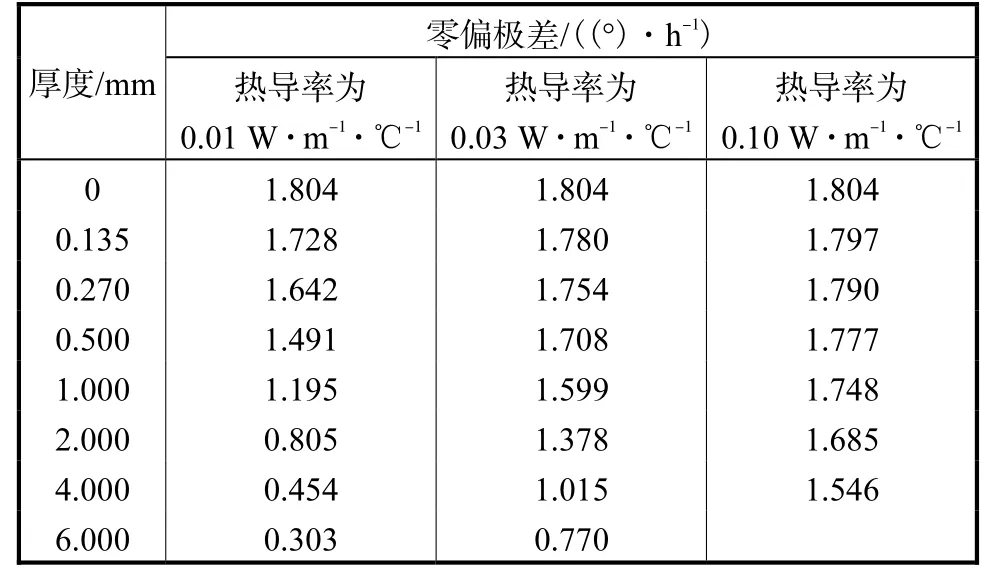
表4 不同热导率和隔热层厚度光纤陀螺输出的零偏极差Tab.4 Zero deviation of the output of fiber optic gyroscopes with different thermal conductivitiesand insulation thicknesses
5 结 语
本文通过ANSYS有限元分析方法分析了光纤陀螺内部热源和外部热源影响导致的温度梯度变化,基于Shupe效应分析了内部热源和外部热源对光纤环性能的影响及对应的光纤陀螺输出零偏误差,通过试验测试内部热源和外部热源光纤陀螺的输出零偏误差,试验结果与仿真计算结果一致.结果表明,内部热源和外部热源下,都是轴向温度梯度最大,当只有内部热源影响时,主要影响光纤陀螺的启动性能,当内部热源和外部随时间变化的热源共同作用时,外部热源为主要影响因素.当非均匀热源作用时,考虑非均匀热源施加在光纤环圆周上不同点时,热源越靠近光纤环中点,引入的温度误差越小,应考虑光纤陀螺内部热源和外部热源位置以光纤环中点对称分布.当脱骨架光纤环采用不同热导率的介质和不同厚度的隔热缓冲层时,较低的热导率和较厚的隔热缓冲层可以明显减低光纤环的温度误差.对于脱骨架光纤环设计和使用,以及光纤陀螺的结构设计方案具有重要的指导意义.
