家用智能投喂-灌溉机器人*
2021-04-22刘美江伟杨玉清雷军段建发王念江
刘美 江伟 杨玉清 雷军 段建发 王念江
(六盘水师范学院矿业与土木工程学院,贵州六盘水 553000)
0 引言
对现有的市场调查,在家用智能投喂灌溉方面的研究是十分稀缺的。由于市场已有的设计大多是单方面的研究,没有整合多种功能,特别是智能投喂的研究方面,少有涉及到空间较小的家庭鱼缸,大都在池塘,湖泊等开阔的环境;家用智能灌溉以管道运输喷洒形式为主,对于花园等倒还可以应付,但在卧式,客厅等比较高雅的场所就显得过分突兀和不合时宜,因此出于以上等原因,对家用智能投喂-灌溉机器人做了相关的研究与设计。该设计主要运用单片机智能控制系统[1],实时监控等技术将食物余量,空气和土壤的湿度反映在LED显示器上,实现在家庭生活中对鱼和植物的智能投喂和灌溉。
1 软硬系统设计
该设计由取材装置,机器人及其规划路线即导航三大部分组成,可细分为硬件系统和软件系统[2],这里硬件部分可以分为从取材装置硬件系统和运输机器人硬件系统。由于取材装置集陈放和提取与一身,食物和水需要存进去和取出来,考虑到食物与水的呈现形态特征,需要设计两个端口。在水管处设置一个微电脑时空开关,全自动时间定时器监控流入盛水容器,当水量足够后,测距模块收到数据反映给中央处理器CPU即可停止补水作业;食物的补给相比就简单多了,在这个过程中,食物多是固体颗粒,只需考虑保质期和密封性的问题,而补给这个作业由人存放,应为通道呈45度角,直接打开阀门即可取食,作业完成后阀门关闭,保持存放食物处的适宜温度和密封性。因此取材装置的硬件系统有单片机控制模块,全自动时间定时器,测距模块,传感装置,LED显示器[3]。基于此,取材装置可放置在靠近水源处,如厨房或浴室等。
中介机器人要完成取水,路线的选取,投喂和灌溉作业,因此其硬件系统包括:单片机智能控制系统、GPS定位导航模块、温度传感器模块、测距模块、LED显示模块、投喂和灌溉模块、抽水模块、电源电路模块等[3]。因为设计由三个复杂的负反馈系统组成,其中各部分互相作用,因此,路线的规划就包含在整个系统里了。
2 软件系统设计
检查电路完备情况,确定设备周边环境安全可靠后接通电源,单片机开始运作,将测距模块传感器模块接收到的信息传到中央处理器CPU进行处理,将此时刻的温度、湿度、水量、食量显示在LED液晶屏上。如果显示屏呈现的温度和湿度高出单片机程序所设置的温度和湿度时,则灌溉系统启动,灌溉工作开始;反之,灌溉系统不启动。若LED显示屏上的温湿度小于程序所设的值,灌溉系统呈现关闭状态[4];该操作周而复始,反复重复。当水量小于单片机程序设置的值在显示在显示屏中,抽水泵启动开始抽水补给蓄水池;当抽水泵不启动时,则表明水量达到设定值,水量处于饱和状态,那么抽水泵关闭;以上作业在不断的重复,以检测数据,完成传递,做出指令来实现整个作业。此外还要实现投喂作业,单片机将接收到的信号通过中央处理器处理后,食量的多少反映在显示屏上,未超过程序值时,投喂系统不进行投喂作业,处于关闭状态;当显示屏显示值大于所设置的值,投喂系统开始工作,系统运行,积极作业。
2.1 方案难点
(1)ADC0809使用的运算方法导致运算输出的结果不够准确[1];
(2)单片机能接受的工作电压太小,抽水泵不能完成抽水作业;
(3)温湿度传感器灵敏度的调节和测距模块与蓄水池的距离设置[3];
(4)GPS定位导航同传感器与单片机以及LCD显示屏的结合应用;
(5)由于工作范围不大,对GPS定位精度要求极高。
2.2 关键技术
(1)GPS定位导航技术;
(2)通过测距模块测试水量和食量;
(3)单片机控制传感器并通过A/D转换器将值显示在显示屏上[2];
(4)硬件中,投喂系统和灌溉系统的整合设计,且保障系统稳当耐用;
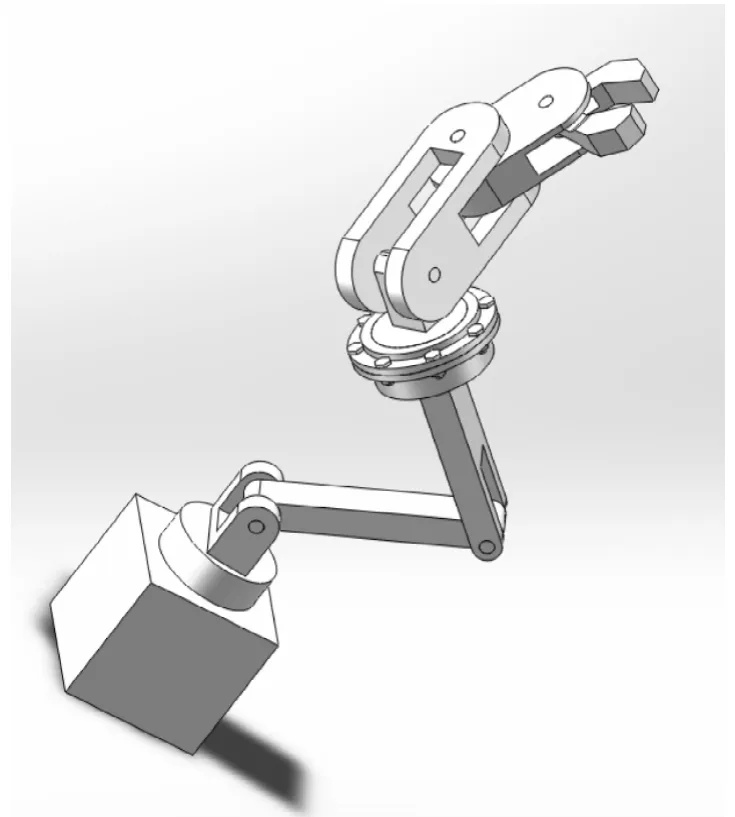
图1 机械手建模图Fig.1 Manipulator modeling diagram
(5)软件中,单片机系统的可靠性技术要求高,多个程序同时调用又不能彼此影响。
针对家用智能投喂-灌溉机器人伸缩高度的研究,因为每一个家庭环境的不同,对鱼缸的高度,花盆的放置情况有所不同,根据不同的放置高度,对机器人的收缩问题进行分析与设计。
2.3 机器人功能基础
由于投喂和灌溉的需要,机器人手臂需要进行投喂和灌溉作业,这即是机械臂需要实现的功能。包括上台手臂,进行作业,缩回手臂。因此该机械臂具有收缩的附加功能,辅助机器人完成作业。因为机器人的功能基础,本团队进行了两种方案设计:
方案一:机械臂设计;
方案二:机器人的底座设计一个伸缩装置。
经过对比后选择方案一更具优势,最终选择方案一进行分析设计。
3 机械臂的结构设计
应为设计功能的需要,机械臂起相当一个传送介质,动物需要用到食物和植物需要水分均需要通过手传递,因此作为机械的一个重要组成部分,手臂不仅起到支撑重物、传递,运输的作用,而且还可以驱动手爪提取水,并根据事先预定的路线将水和食物体搬运到指定地点。
以为传输的物质的形态不一,设计机械臂左臂需投喂,右臂灌溉。即都需满足一下设计原则:
(1)刚度要大;避免运动过程中发生较大的形变;
(2)导向性要好;避免运动过程中发生无用的相对运动;
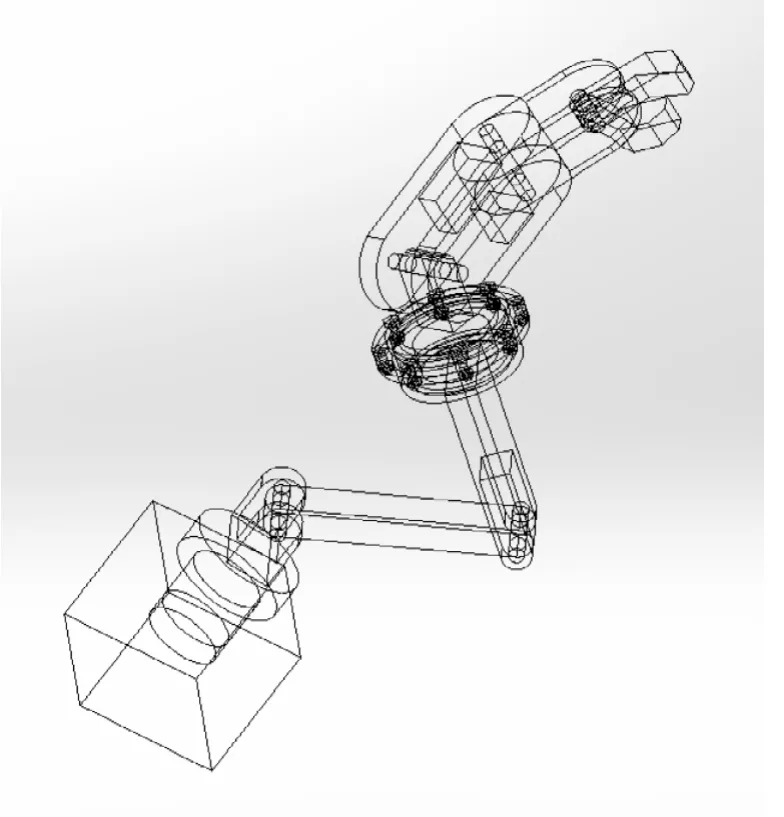
图2 机械手Fig.2 Manipulator
(3)偏重力矩要小;机械臂不止要承受重物的质量,还要承担自身的重量,因此要尽可能减小机械臂运动部分的质量。
自由度的确定:机械臂的自由度的选择取决于机械臂的功能和结构,是能否顺利完成任务的一个保障。根据机械臂要实现的功能来计算机械臂需要的自由度。一般来说机械臂的自由度越多,灵活性越大,通用性越强。机械臂越多就意味着成本越大,因此在能完成任务的前提下,该机械臂(左臂)使用四个自由度即可完成作业,建模如图1、图2,右臂雷同。
4 结语
家用智能投喂-灌溉机器人可用在家庭喂食鱼苗,乌龟等小动物,灌溉观赏的盆栽植物,小范围的公园灌溉等也可应用,由于该设计是针对性是创造,适用范围和对象有一定的限制,并不能十分广泛用于各种各样的场景,如农田灌溉庄稼,湖泊投喂等。不过该设计对食物的安全性,水量的测量,空气湿度的显示比较精准,可以通过液晶显示器观察到整个作业过程,视觉上增加了人的参与度,实际解放了劳动力,节约了时间成本和水资源。该设计运用科学监测技术和数据分析方法,合理投喂和灌溉,让作业对象能更加科学合理的进食和吸收水分。因此设计不仅实现了实时智能监控,而且节约了成本,对于高质量的居家生活和旅游人生都是一个保障,同时,提供一种能动的体验。在智能智造的大背景下,家用智能投喂灌-溉机器人能方便我们的直接价值的同时还能带来更多的潜在价值,如美的体验,节约资源,美化环境,提高生活质量等,因此具有巨大的使用前景和市场空间。
