基于单片机的直流电机闭环调速系统设计
2021-04-22王波
王波
(广东海洋大学电子与信息工程学院,广东湛江 524088)
0 引言
近年来微机数字化控制技术的成熟,以及PID控制、模糊控制、神经网络等高效控制算法的应用,加速了直流电机调速领域的蓬勃发展。由于直流电机具有良好的调速性能,控制简单、效率高及优异的动态特性、使用寿命长等优点,因而在航空航天、数控机床、机器人、电动汽车、和家用电器等方面都获得了广泛应用。直流电机的调速方案一般有以下3种方式:(1)改变电枢电压;(2)改变激磁绕组电压;(3)改变电枢回路电阻[1]。
本文以MC9S12XS128单片机为系统控制的核心,驱动采用LM298双H桥直流电机驱动模块,并用光电码盘检测并反馈电机的实际速度,组成了一个小型的直流电机闭环调速系统。实验结果表明,该控制系统能够实现自动调速,具有响应速度快,抗干扰性高等特点,可以在实际生产和生活中广泛应用[2]。
1 硬件电路设计
1.1 系统总体方案设计
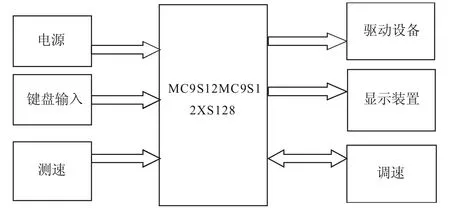
图1 控制系统框图Fig.1 Block diagram of control system
本文以MC9S12XS128作为控制器,设计了键盘模块,用以设定电机转速。通过键盘输入模块设定转速将信号传递给控制器,控制器输出相应的PWM信号给驱动模块,调节电机转动的转速,测速模块实时地对电机进行测速,测得的数值实时的再反馈到控制器,控制器的数值与键盘输入值进行比较,形成闭环控制系统,根据比较结果,应用PID控制算法,使电机的实际转速与设定值相等或无限接近[3]。
本文采用LM298双H桥直流电机驱动模块,并用光电码盘检测并反馈电机的实际速度,组成了一个小型的直流电机闭环调速系统。采用脉宽调制PWM控制技术,对直流电机进行调压调速控制[4-5]。为了实现电机调速的稳定性和快速性,应用了PID控制算法。系统的结构框图如图1所示。
1.2 驱动控制电路设计
驱动控制电路的采用驱动芯片LM298来组成H桥,LM298的5、7、10、12引脚为四路PWM输入端口,分别用来控制两个电机,本文只需要用到1路即选用5、7引脚输入PWM加以控制;6、11引脚分别为两组PWM输出的使能端;8脚接地,9脚接5V电源为驱动芯片提供电源,4脚接电机驱动电压;2、3、13、14引脚为两组PWM输出接。本设计主要由占空比控制电压值大小。通过调节占空比,占空比越大,则电压值越大,电机的转速增加,相反则电机的转速越慢,从而实现PWM对电机的调速。驱动电路如图2所示。
1.3 测速电路设计
电机测速传感器采用光码盘和光电对管相互配合实现。光电对管输出的脉冲信号与单片机的计算器接口PT7连接,用以计数。由于光电对管输出的脉冲型号相位相差九十度,波形相同,所以可以利用相位和电机的正反转相对应。当电机正传时,后一个脉冲落后前一个脉冲九十度,电机反转时就好相反,后一个脉冲则超前前一个脉冲九十度。在实际电路中,只检测了一路脉冲信号,通过它的频率测量得到电机的转速。电机的转向是通过施加在电机上的电压正负进行判断的。在红外发光对管和红外接收对管之间有一个100线的光电码盘,码盘固定在电机轴承上,光电码盘随着电机的转动而转动,信号线会输出转速脉冲,这时可以根据主控芯片PT7口的输入捕捉,假设记录1s内脉冲信号的上升/下降沿的个数为N,对脉冲数进行处理(N/100)*60即得到一分钟内电机的转速,这就实现了电机测速的功能[6]。
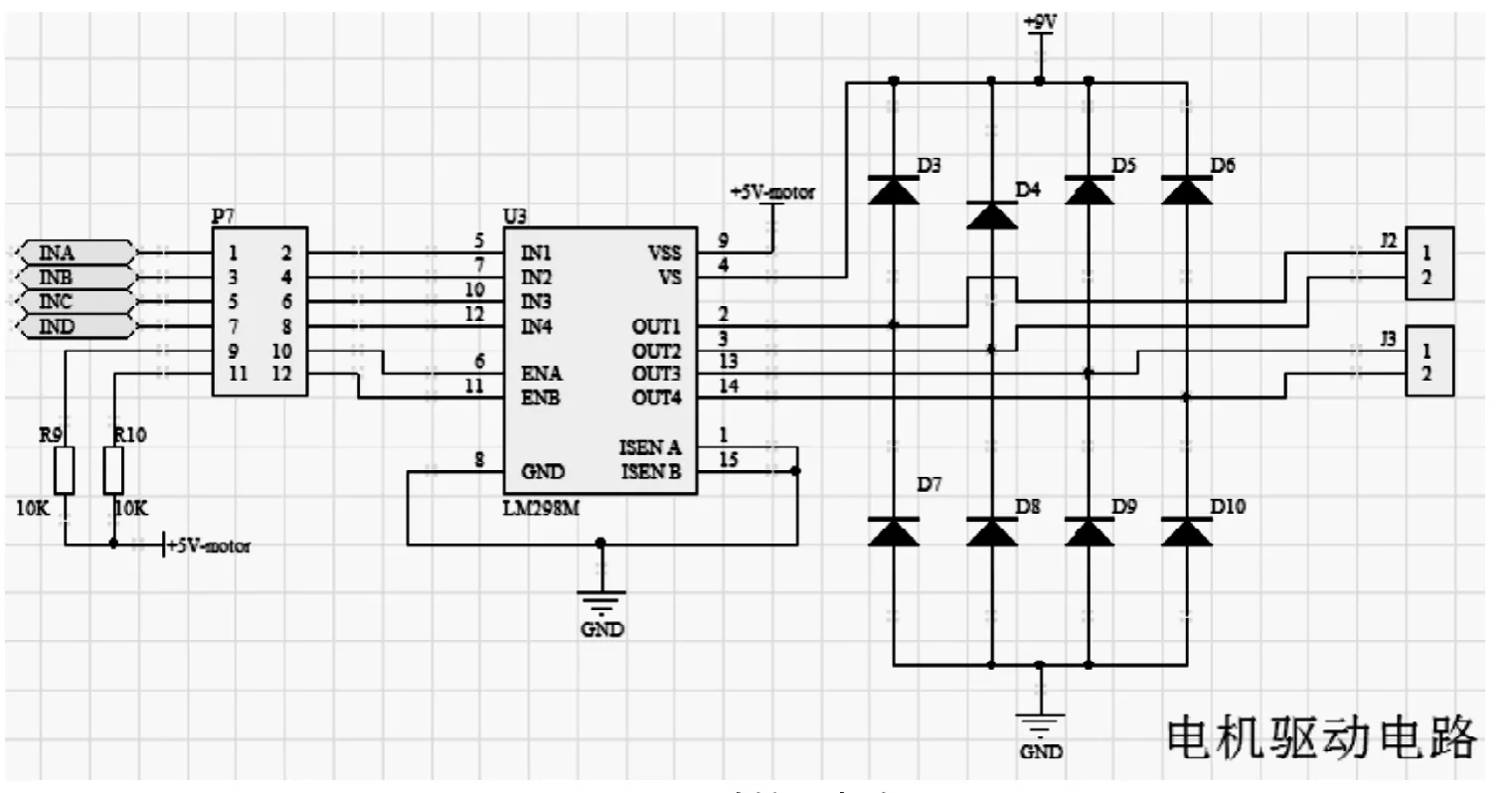
图2 驱动控制电路Fig.2 Drive control circuit
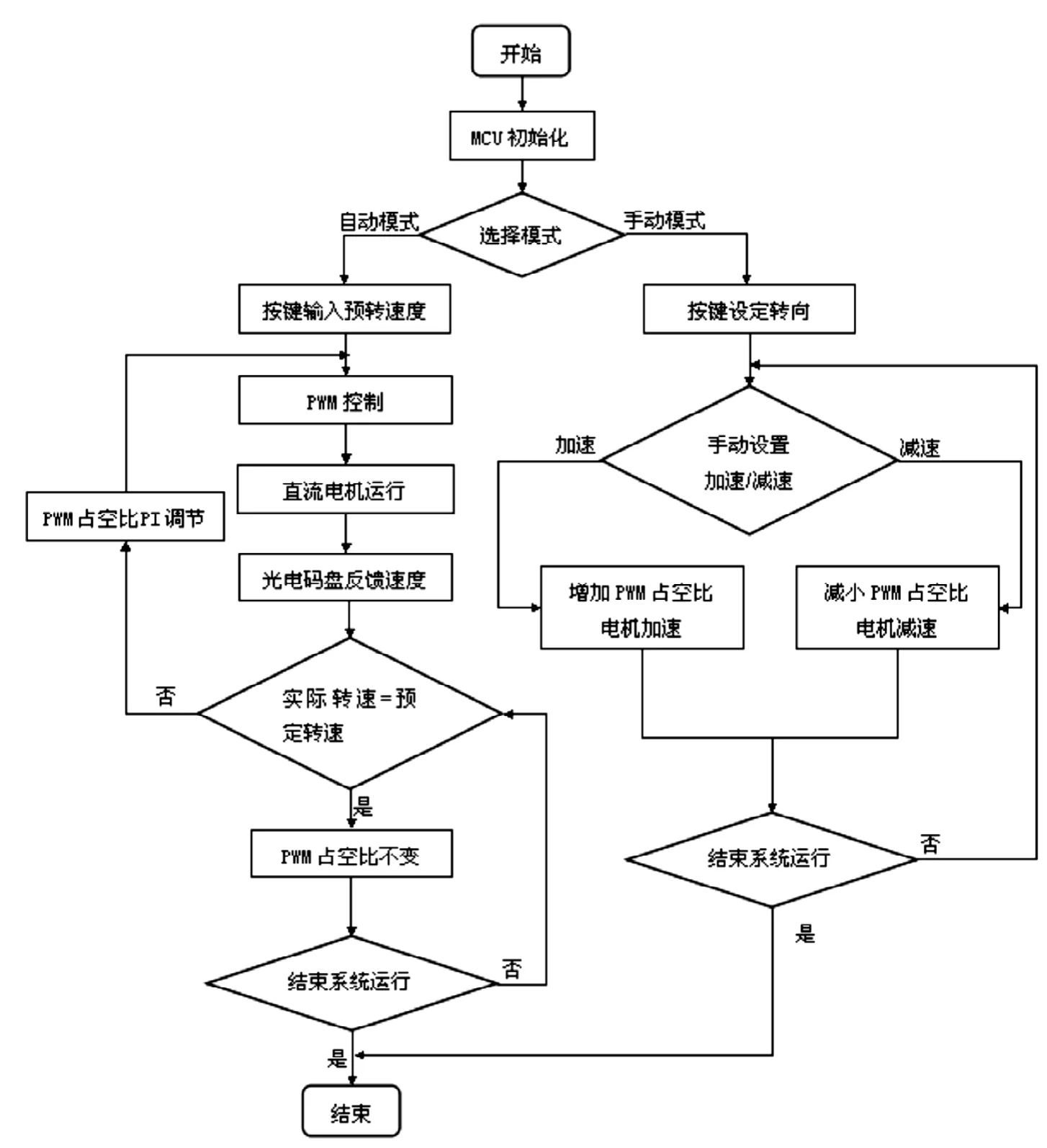
图3 主程序流程图Fig.3 Main program flow chart
2 软件设计
2.1 软件程序设计
系统启动后,由按键选择系统运行模式,总共有两种模式,即自动模式和手动模式。
当选择手动模式时,液晶屏提示转向设置,默认为正转,设定后按S17确认键,初始化后驱动电机PWM占空比为0,即电机停止。这时可以通过加速按键或减速按键调节PWM占空比对电机进行加减速控制。
当选择自动模式时,液晶屏将提示输入预转速度,由于电机的驱动电压及本身功率限制,其转速范围在600-5700之间,因此设定的预转速要在这个范围之内。当设定预转速后MC9S12XS128单片机对预转速和光电码盘反馈的实际速度进行比较,若两者之间无偏差,则占空比及转速均不变;若有偏差则通过调节占空比来调节转速值,直到偏差为零或接近于零。主要原理是:当实际速度大于设定值时,就调节占空比使之变小,则电机电压变小,实际速度减小接近于设定值;反之,调节占空比,使之增大,电机两端电压增大,实际速度增大,接近或等于设定值。通过实时比较,PID控制算法,使电机的实际速度和设定值相等或是在设定值附近,实现电机速度稳定在设定值。
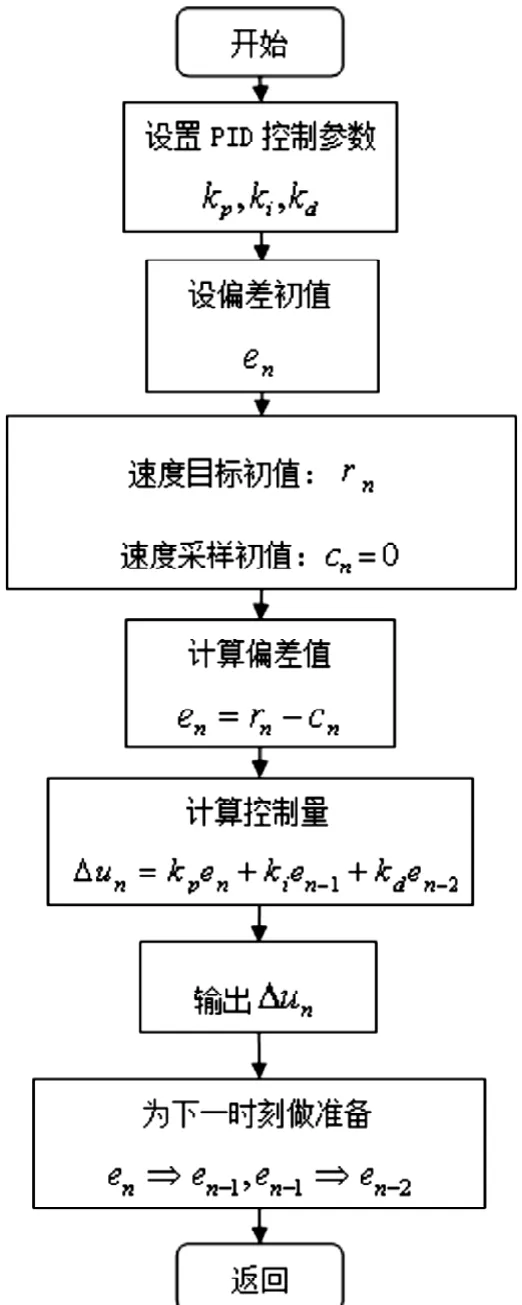
图4 PID控制流程图Fig.4 PID control flow chart
主程序流程图如图3所示。
2.2 增量式PID控制算法
本设计采用的是增量式PID控制算法,相对于位置式算法,增量式PID算法只需计算增量,当存在计算误差或精度不足时,对控制量计算的影响较小[7]。
PID控制流程图如图4所示。
3 结语
本文闭环直流电机调速系统,通过设置预设转速的大小,使电机自动的调节到预设的转速。实现了系统对电机的调速、速度显示等功能。用Nokia5110实时显示实际速度和预设转速,驱动模块的驱动电机的转速正常,发热量不大,在12V电源下最高可以使电机的转速达到5700转/min。
MC9S12XS128系统控制芯片的运作效果良好,通过单片机产生PWM信号,便于设计中对电机的转速进行控制,调节占空比的大小,使电机达到预设值。系统采用了PID控制算法,实践证明PID控制算法满足直流电机自动调速功能,调速效果稳定。
