量子重力梯度仪研究进展
2021-04-16杨公鼎翁堪兴
杨公鼎,翁堪兴,吴 彬,程 冰,林 强
(1.浙江省量子精密测量重点实验室,杭州 310023;2.浙江工业大学理学院应用物理系,杭州 310023)
0 引言
地球重力场是由地球系统物质属性产生的一个基本物理场,其分布由地球内部物质密度决定[1]。地球重力加速度和重力梯度都会随空间位置变化而变化。重力梯度是重力加速度随空间的变化率,其测量值还会受到地球自转、潮汐以及空气阻力等因素的影响[2]。高精密重力梯度测量对资源勘探[3- 4]、地球科学研究[5-7]以及国防建设[8]等具有重要意义。在资源勘探方面:当前我国处于对能源和矿产资源需求高速增长的阶段,通过分析重力梯度信息可以有效地计算出矿产分布,提高勘探效率[9-12];在地球科学研究方面:重力梯度信息可应用于地球内部构造和板块运动、地壳形变、地震预报等研究领域[13];在国防建设方面:重力梯度信息是非常重要的基础资料,在现代化的武器装备中,无论是洲际导弹还是中短程导弹,重力梯度参数都对保证目标命中精度具有决定性的作用。高精度的惯性导航系统主要依赖于重力场模型和补偿精度[2],使用重力梯度仪和惯性导航相结合的方式是一种理想的解决方案,基于重力梯度仪实时测量重力梯度,为惯导系统提供重力补偿信息[14-15],从而消除垂线偏差所产生的水平速度误差和姿态误差,以满足载体高精度长航时导航的需求。
量子重力梯度仪是近30年快速发展起来的一种量子精密测量仪器[16]。量子重力梯度仪主要可分为单磁光阱多次拉曼光脉冲[17]、单磁光阱多次上抛原子团[18]、双磁光阱组合梯度仪[19]三种技术方案。量子重力梯度仪可以测量绝对重力梯度,理论上不存在漂移,是进行长航时高精度惯性导航以及重力匹配辅助导航的最优可选技术方式。美国国防部高级研究计划局(Defense Advanced Research Projects Agency, DARPA)已经立项支持便携式重力梯度仪方案。在2015年文献中公布的研究成果显示[20]:重力梯度测量精度可达1.2E。近期的研究结果也表明量子重力梯度仪具有极大潜力。
本文对传统和量子重力梯度仪的基本原理和国内外的研究进展情况进行了综述,并结合本课题组的研究,对新型的量子重力梯度仪样机进行了描述。
1 传统重力梯度仪
自世界上第一台扭秤式重力梯度仪问世以来,重力梯度仪经历了一个多世纪的快速发展,逐渐从扭力测量、旋转加速度计测量、静电悬浮测量、超导测量、自由落体测量发展为量子技术测量。重力梯度仪是重力精密测量领域的一种非常有效的手段,在基础物理研究[21-23]和工程应用领域有着广泛的应用。不同的重力梯度测量精度决定了其不同的应用领域,图1所示为不同精度重力梯度仪的应用场景[24]。

图1 重力梯度仪的应用[24]Fig.1 Applications of gravity gradiometers
1.1 扭秤式重力梯度仪
19世纪90年代初,匈牙利物理学家和工程师厄特沃什·罗兰(Loránd Eötvös, 1848—1919)研制出了扭秤式重力梯度仪,自此开创了重力梯度测量的先河。同时,为了纪念厄特沃什在重力梯度测量工作上的伟大贡献,通常使用E或者Eo(1E=10-9/s2)作为重力梯度测量的常用单位。
扭秤式重力梯度仪(见图2)由2个质量相同高度不同的质量块(称为检验质量)组成,这2个质量块由细丝悬挂在水平横梁上。如果作用在质量块上的重力不相同,2个质量块感受到的重力差会在横梁上施加扭矩,从而引起横梁发生偏转,然后通过单独的刻度尺和望远镜进行读数[25],可以高精度测量重力梯度。
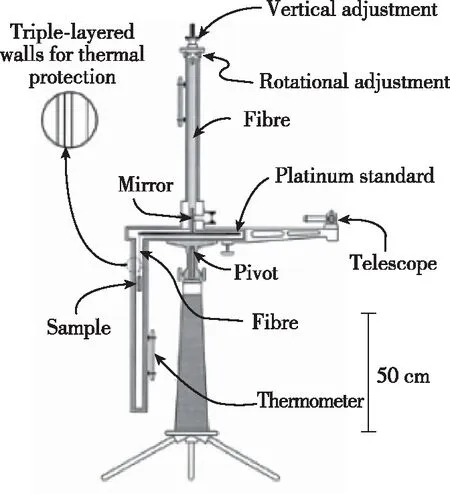
(a) 示意图[26-27]

(b) 实物图图2 扭秤式重力梯度仪Fig.2 Torsional gravity gradiometers
扭秤式重力梯度仪的测量精度可达1E,但其测量操作非常繁琐,一个测量点往往需要花费数小时,而且每次测量至少需要在不同的方向上测出5个独立的偏转角才能计算重力梯度分量,使得整个测量周期会非常长。
1.2 旋转加速度计式重力梯度仪
1982年,美国Bell Aerospace公司研制出了旋转加速度计式重力梯度仪,并实现了全张量重力梯度(Full-Tensor Gravity Gradients, FTG)测量。其基本结构是由电子匹配的加速度计对组成,利用差分信号输出,得出重力梯度信息。FTG系统在20世纪90年代末被公开,并允许用于特定区域的航空重力测量[25]。澳大利亚必和必拓公司(BHP Billi-ton)和美国洛克希德·马丁公司(Lockheed Mar-tin)合作研制了含有8个加速度计的FALCON航空重力梯度仪(见图3),其测量精度为10E。

图3 FALCON重力梯度仪[25]Fig.3 FALCON gravity gradiometer
机载全张量重力梯度仪(见图4)是由3个旋转圆盘组成的伞形结构作为核心,每个圆盘被称为重力梯度仪(Gravity Gradient Instrument, GGI),安装在陀螺稳定平台上。
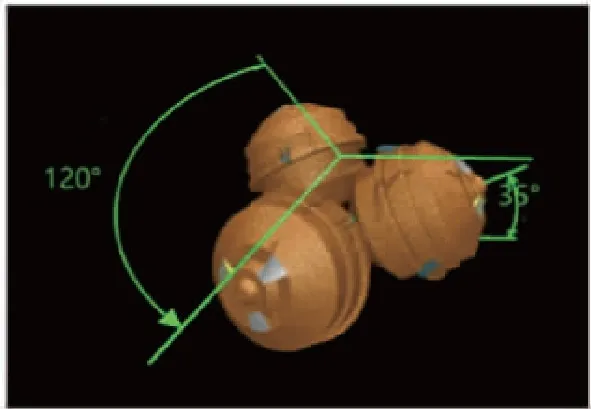
(a)结构示意图[28]

(b)实物图图4 机载全张量重力梯度仪 Fig.4 Airborne full tensor gravity gradiometer
1.3 静电悬浮式重力梯度仪
静电悬浮式重力梯度仪能够检测单点多自由度非保守力,且可以实现高精度重力梯度测量。该类型重力梯度仪是在每个矢量方向放置一个静电悬浮加速度计,运用差分原理测量每个矢量方向上的重力梯度张量。该梯度仪的探头包含外壳和惯性传感质量两部分,惯性质量通过静电力悬浮在探头中心,与外壳没有任何机械连接,采用差分电容方式输出检验质量的位移,最终获得极高的测量精度,其结构如图5所示。高精度静电悬浮式重力梯度仪在航空重力及重力梯度测量中都有重要应用[29]。

(a)差分电容静电悬浮加速度计结构示意图
(b)静电悬浮加速度计实物[30]图5 静电悬浮式重力梯度仪Fig.5 Electrostatic suspended gravity gradiometer


图6 GOCE搭载的静电悬浮加速度计重力梯度仪[32]Fig.6 Electrostatic suspended accelerometer gravity gradiometer on GOCE
1.4 超导重力梯度仪
超导重力梯度仪本身具有高灵敏度、高分辨率、低噪声、高机械稳定性等优点[33-35],适用于船载、航空等测量场景。
超导重力梯度仪是基于超导加速度计进行差分测量以获取重力梯度信息。超导加速度计的原理是:超导检测质量受加速度影响会产生位移,利用迈斯纳效应结合超导量子干涉仪(Superconduct Quantum Interferometer Device,SQUID)可以实现加速度高精度测量[37]。超导检验质量与机械弹簧连接,感应线圈在检验质量对面。重力加速度的改变会引起感应线圈和检验质量的间距发生变化,从而导致感应线圈的有效电感发生变化,即可获得重力加速度的变化量[38]。图7所示为超导加速度计的原理示意图。
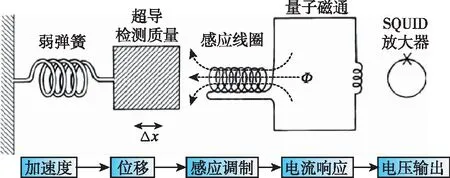
图7 Maryland大学研制的超导加速度计简化原理图[36]Fig.7 Simplified schematic diagram of superconducting accelerometer developed by Maryland University
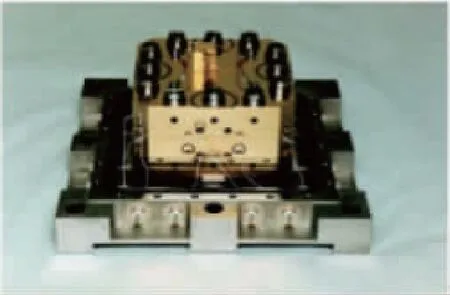
将6个完全相同的超导加速度计安装在正六面体上,相对面上的2个超导加速度计就组成一个梯度仪,其敏感轴正交于正六面体的表面,从而构成三轴超导重力梯度仪(Superconducting Gravity Gradiometer, SGG)。图8所示为Maryland大学研制的三轴超导重力梯度仪[39]。

图8 Maryland大学研制的三轴超导重力梯度仪[39]Fig.8 Three-axis superconducting gravity gradiometer developed by Maryland University

2 量子重力梯度仪的基本原理
量子重力梯度仪是利用超低温原子团代替惯性质量来感应重力作用,并结合激光与原子团的相互作用,使原子所处叠加态的相位与运动路径中受到的重力加速度相关,通过探测原子的内态布居数来获得重力加速度信息[13]。
量子重力梯度仪可实现绝对重力梯度测量,并且不易受测量区域环境的影响。量子重力梯度仪可应用于航空重力梯度测量、引力常数G测量,以及补偿由重力异常造成的惯导系统偏差等场景[20]。
2.1 激光冷却
激光冷却是指利用光场与原子之间的相互作用力实现原子减速。1975年,美国国家标准与技术研究院(National Institute of Standards and Technology, NIST)的Wineland和Dehmel[43]与美国斯坦福大学的Hänsch和Schawlow[44]分别提出了利用对射激光束对中性原子和束缚在电磁阱中的离子进行多普勒冷却的方案[45]。多普勒冷却的基本原理是:当一束反向传输的激光照射到初速度为v0的原子时,由于多普勒效应,原子实际感受到的激光频率会比激光本身的频率高,因此冷却光的频率相对原子跃迁频率需要存在红失谐(负失谐)以补偿多普勒效应带来的频差。当原子吸收了反向光子的动量之后,原子的运动速度会减慢,同时由于原子自发辐射光子的方向是各向等概率的,所以在多次循环之后自发辐射的合力为零。
1985年,美国贝尔实验室的朱棣文研究组利用三对正交的激光束照射钠蒸气室,在这三对激光交汇处产生一种称为光学黏团(Optical molasses)[46]的原子状态,原子的温度低至240μK,达到了激光冷却的理论极限温度(多普勒极限温度)。但是很快这个理论极限温度就被NIST的Phillips研究小组打破,他们利用光学阻尼将钠原子冷却至43μK[47],成功地突破了多普勒理论极限温度。此后,原子冷却极限温度被不断打破,到1996年,Cohen-Tannodji研究组利用速度选择相干布局囚禁(Velocity-Selective Coherent Population Trapping,VSCPT)将铯原子一维温度冷却到3nK[48]。激光冷却和囚禁原子的发展历程如图9所示。
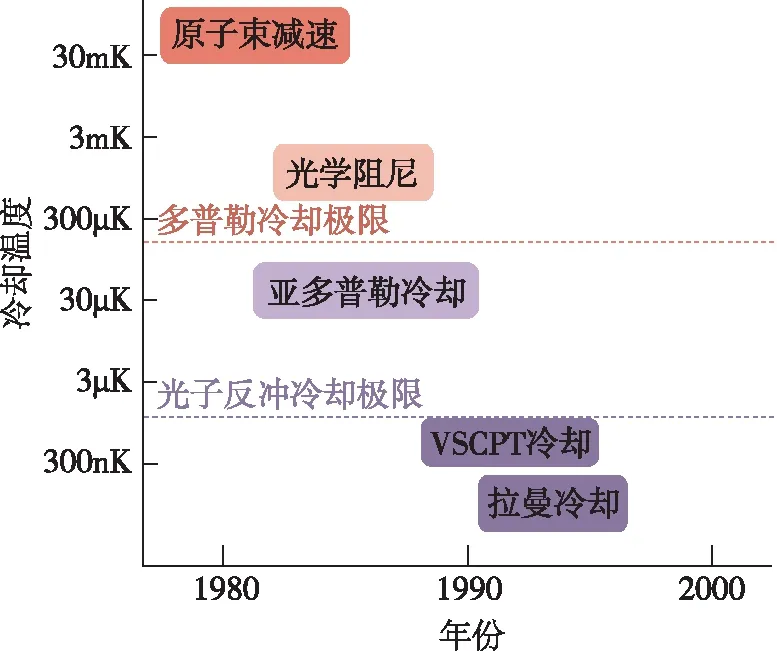
图9 激光冷却和囚禁原子的发展历程[45]Fig.9 History of laser cooling and confinement of atoms
利用光学黏团可以有效地对原子进行减速与冷却,但要想实现原子的捕获还需要指向原子团中心的回复力。1987年,朱棣文研究小组和美国麻省理工学院的Pritchard研究小组合作,采用了Dali-bard提出的梯度静磁场和光学黏团组合方式,实现了原子的冷却与捕获。后来把这种组合了梯度静磁场和光学黏团的原子冷却与捕获技术称为磁光阱(Magneto-Optic Trap, MOT)技术, 磁光阱模型如图10所示。
MOT由六束两两对射并且相互垂直的圆偏振激光和梯度静磁场组成。梯度静磁场则由一对反亥姆霍兹线圈提供,在六束激光的交汇处磁场强度为零,梯度磁场与激光的偏振相结合产生对原子的回复力。因此,原子在磁场和光场的相互作用下受到指向坐标原点的辐射压力[45],最终能够在MOT的中心实现原子的三维冷却和捕获。
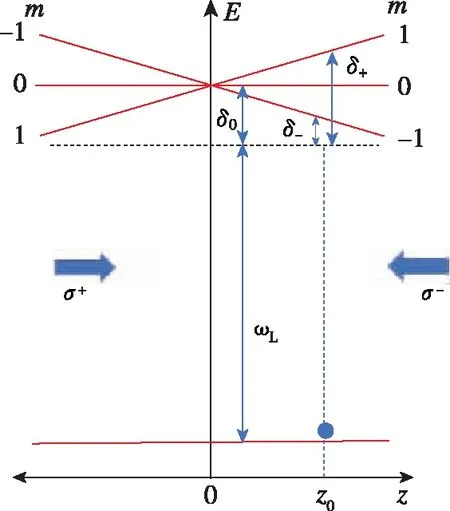
(a) MOT中的原子能级
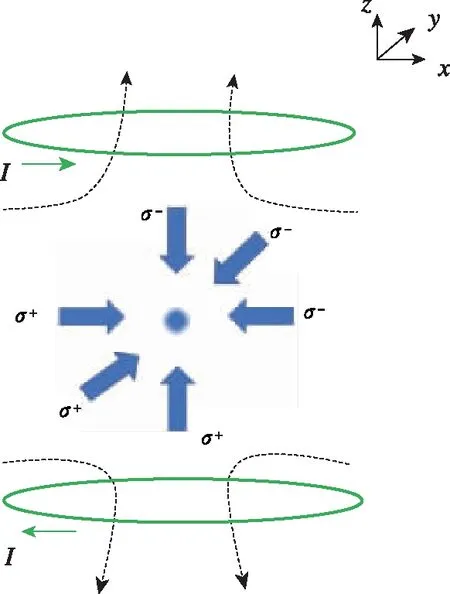
(b) 实验装置示意图图10 磁光阱模型Fig.10 Magneto-optical trap model
2.2 原子干涉
原子干涉的理念最早可以追溯到量子力学的形成初期。1924年,法国物理学家德布罗意提出了物质波的概念:具有质量的粒子也可以具有波动性质,其波长λ由普朗克常量h和粒子的动量p决定,即λ=h/p。目前,实验上采用最多的是三脉冲受激拉曼原子干涉仪。
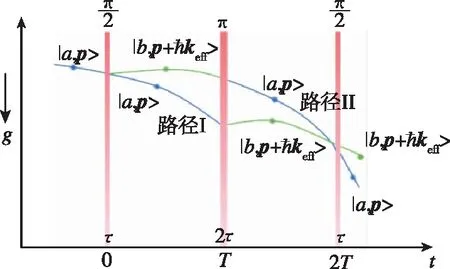
图11 三脉冲原子干涉仪脉冲时序Fig.11 Pulse sequence of three pulse atomic interferometer
三脉冲受激拉曼原子干涉仪由3个拉曼脉冲π/2-π-π/2构成(见图11)。实验过程中,囚禁的原子团在初始时刻都在|a,p〉原子态,此时原子具有的动量为p。在t=0时,作用第一束拉曼π/2脉冲,作用时间为τ。在这里π/2脉冲的作用相当于Mach-Zehender干涉仪中的分光镜,将原子均分到|a,p〉和|b,p+ћkeff〉态上,其中keff是拉曼光的有效波矢。在2个态上的原子动量不同,被均分的两团原子沿着不同的路径进行演化。在t=T时,对原子团作用一束π脉冲,作用时间为2τ。在该脉冲的作用下,原子演化路径和能态会发生反转,|a,p〉态上的原子跃迁到|b,p+ћkeff〉态上,而|b,p+ћkeff〉态上的原子跃迁到|a,p〉态上,其作用相当于光学干涉仪中的反射镜。在t=2T时,作用第三束π/2脉冲,以实现原子团的合束,将沿着不同路径演化的2个态上的原子相干叠加起来,此时会产生原子的内态干涉。
由于2个态上的原子经历了不同的演化路径,会存在一定的相位差。原子和光子相互作用后,光的位相叠加到原子态上。原子干涉仪的相位一般分为两部分:受激拉曼跃迁过程中由激光和原子相互作用引入的相位ΔΦlaser;原子在重力场中自由演化引入的相位ΔΦevolution。原子干涉条纹的相位表示为
ΔΦ=ΔΦlaser+ΔΦevolution=keff·gT2
(1)
其中,keff是拉曼光的有效波矢;g是重力加速度;T是两束拉曼脉冲的时间间隔。通过改变拉曼光失谐可以得到干涉条纹,在实验中通过啁啾扫描拉曼光频率的技术来实现,式(1)可以写为
ΔΦ=(keff·g-2πα)T2
(2)
对于双态原子干涉仪来说,任一态的原子跃迁概率P可以表示为
(3)
式(2)中,α为拉曼光的啁啾率,其测量精度可以很高,通过这种方式将重力的测量转换成频率的测量,进而实现高精度的重力加速度测量。由式(2)可知,若keff·g-2πα=0,则无论T取什么值,所有的干涉条纹都会交于一点,通过测量这一点的α值就可以得到绝对重力加速度值g=2πα/keff。对α值进行长时间监控就能够测量相对重力值。式(3)中,A表示干涉条纹的偏移量,C表示干涉条纹的对比度,通过式(2)和式(3)计算原子的跃迁概率可测量出重力加速度g。
2.3 梯度测量
在地球表面,重力加速度由地球的引力决定,按牛顿引力理论,地球的引力场可以表示为
(4)
其中,G为万有引力常数;r′为体积元的位置;ρ(r′)为r′处的地球物质密度;r表示空间某一点的位置;积分区域为整个地球。地球表面的重力加速度为

(5)
重力梯度张量是重力加速度g的导数,由3×3的矩阵表示
(6)

Txx+Tyy+Tzz=0
(7)
则在9个重力梯度张量中有5个是独立分量。对于竖直方向的分量∂zgz,将地球视为球体,其质量分布均匀,形状规则,赤道半径视作该球体半径Re=6.37814×106m,地球引力常数按GMe=3.986005×1014m3/s2计算,则地球表面的重力加速度和重力梯度分别为[13]
(8)
(9)
地球表面的重力梯度约为3072E。
重力梯度测量的是重力加速度的空间变化率,最直接的方法是测量出空间两点的重力加速度差和它们的距离差,如图12所示,则对应的重力梯度可以表示为
Tzz=(g1-g2)/l
(10)
其中,g1和g2为相同检验质量在竖直方向感受到的重力加速度;l为2个质量块在竖直方向上的距离差,也叫作重力梯度仪的基线。

图12 重力梯度测量示意图Fig.12 Gravity gradient measurement diagram
量子重力梯度仪的原理是:将2个原子干涉仪在空间上相隔一定距离放置,2个原子干涉仪分别囚禁原子团后同时释放,由于2个原子团在空间位置上具有一定的垂直距离差,通过差分测量可以得到两团原子感受到的重力差。由式(5)可知,重力值是通过相位计算得出,式(5)也适用于单个原子干涉仪,每个原子干涉仪的相移为
Φ1=keff·g1T2
(11)
Φ2=keff·g2T2
(12)
两原子团感受到的重力差Δg是通过提取两团原子相位差ΔΦ得到
Δg=g2-g1=(Φ2-Φ1)/keffT2=ΔΦ/keffT2
(13)
量子重力梯度仪测得的重力梯度γ为
(14)
3 量子重力梯度仪国内外研究进展


图13 耶鲁大学的量子重力梯度仪[49]Fig.13 Quantum gravity gradiometer at Yale University


图14 Kasevich小组的水平量子重力梯度仪[19]Fig.14 Kasevich group horizontal quantum gravity gradiometer

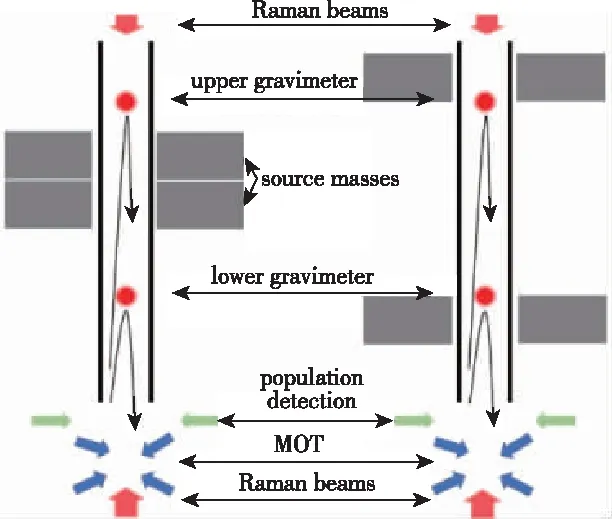
图15 Tino小组重力梯度仪结构示意图[50]Fig.15 Tino group quantum gravity gradiometer structure diagram

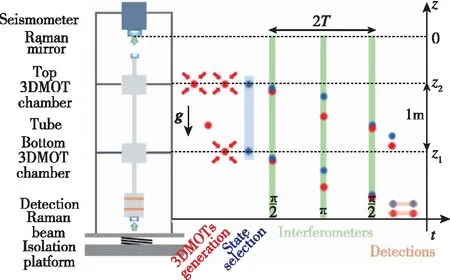
图16 法国巴黎天文台Franck小组量子重力梯度仪[54]Fig.16 Franck group quantum gravity gradiometer, Paris Observatory

(a )原理图

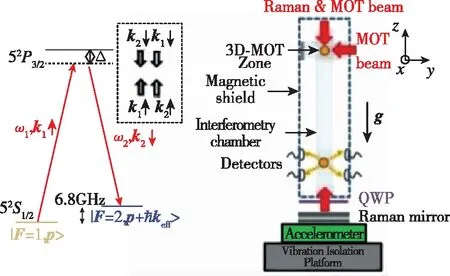
(b)拉曼脉冲时序图[55]图17 ONERA的量子重力梯度仪Fig.17 ONERA quantum gravity gradiometer
目前,国内研制量子重力梯度仪的主要单位有:浙江工业大学、中国科学院精密测量科学与技术创新研究院、华中科技大学和浙江大学等单位。
浙江工业大学林强研究小组的组合式量子重力梯度仪是基于差分测量方法研发的,其结构示意图及实物组装图如图18所示。该量子重力梯度仪由两套独立的原子干涉仪组合而成,每个原子干涉仪通过各自的MOT囚禁87Rb冷原子团,2个冷原子团同时释放后,通过作用时间间隔相同的三束拉曼脉冲(π-π/2-π)进行原子干涉。通过分析原子干涉的相位变化来提取每套的重力加速度信息,然后基于差分测量原理(详见3.3节梯度测量原理部分)并结合椭圆拟合方法获取重力梯度信息,从而实现重力梯度的高精度测量。整个量子重力梯度仪安装在六轴位姿平台上,可实现野外车载重力梯度测量。

图18 浙江工业大学研发的组合式量子重力梯度仪原理及实物组装图Fig.18 Principle and physical assembly drawing of combined quantum gravity gradiometer developed by Zhejiang University of Technology



图19 中国科学院精密测量科学与技术创新研究院的水平重力梯度仪示意图Fig.19 Schematic diagram of horizontal gravity gradiometer of the Institute of Precision Surveying Science and Technology Innovation, Chinese Academy of Sciences


图20 华中科技大学的量子重力梯度仪结构示意图Fig.20 Structure diagram of quantum gravity gradiometer of Huazhong University of Science and Technology
4 总结与展望
本文对重力梯度仪的发展历程、基本原理和研究现状进行了综述。近年来,量子重力梯度仪发展迅速。目前,量子重力梯度仪的灵敏度主要受限于测量过程中的各项噪声,包括测量点的地面振动噪声、拉曼光的相位噪声以及原子探测噪声等。有效地抑制这些测量噪声,是当前提升量子重力梯度仪灵敏度的主要研究方向。
未来,量子重力梯度仪会向着小型化、实用化并且可移动的方向发展。可以对以下几个方面进行改进:1)设计更为紧凑的真空系统;2)体积和质量更小的电控系统;3)效果更好的隔振装置;4)更稳定的光路系统。量子重力梯度仪将来有望在资源勘探、惯性导航和基础科学研究等方面发挥更大作用。
