原子干涉陀螺仪精密测量及应用
2021-04-16李润兵姚战伟鲁思滨李少康詹明生
李润兵,姚战伟,鲁思滨,蒋 敏,李少康,王 谨,詹明生
(中国科学院精密测量科学与技术创新研究院,原子精密感知重点实验室,武汉 430071)
0 引言
随着原子分子物理的发展,人们开始研制原子干涉陀螺仪。在国际上,欧美发达国家率先开展了原子干涉陀螺仪的研究,研究方案可以归纳为两类:其一是冷原子干涉陀螺仪,法国巴黎天文台首先实现了冷原子干涉陀螺仪,灵敏度为2.2×10-6(rad/s)/Hz1/2,分辨率为1.4×10-7(rad/s)@600s[1];美国斯坦福大学冷原子干涉陀螺仪的灵敏度为8.5×10-8(rad/s)/Hz1/2[2];德国汉诺威大学冷原子干涉陀螺仪的灵敏度为1.2×10-7(rad/s)/Hz1/2,分辨率为2.6×10-8(rad/s)@100s[3]。我们国家也非常重视原子干涉陀螺仪,中国科学院精密测量科学与技术创新研究院(简称精密测量院)等相继开展了冷原子干涉陀螺仪研究。精密测量院在国内率先实现了冷原子干涉仪[4],通过研究受激拉曼过程中的相关物理问题[5-7],解决原子干涉仪中的技术难题并发展新方法[8-10],实现了冷原子干涉陀螺仪[11]的灵敏度为1.2×10-6(rad/s)/Hz1/2,分辨率为6.2×10-8(rad/s)@2000s[12]。近期,法国巴黎天文台研制出高度为2m的四脉冲冷原子干涉陀螺仪,灵敏度为3.3×10-8(rad/s)/Hz1/2,分辨率为3×10-10(rad/s)@10000s[13-14];精密测量院研制出长度为1m的三脉冲冷原子干涉陀螺仪,灵敏度为1.5×10-7(rad/s)/Hz1/2,分辨率为9.5×10-10(rad/s)@23000s[15]。其二是原子束流干涉陀螺仪,美国耶鲁大学实现了长度为2m的原子束流干涉陀螺仪,灵敏度为6×10-10(rad/s)/Hz1/2 [16-17],分辨率为3.4×10-10(rad/s)@17000s[18]。目前,原子干涉陀螺仪还有很大的提升空间,发展高精度原子干涉陀螺仪非常必要。
原子干涉陀螺仪作为一种新型精密测量仪器,可以精确测量载体的转动信息,因此,研制高精度原子干涉陀螺仪对发展我国精密测量科学与应用技术有着重要的意义。由于原子的量子属性,决定了原子干涉陀螺仪具有更好的长期稳定性、漂移小、精度高,且通过长时间积分后能够达到更高的转动测量分辨率。为了能够更好地将原子干涉陀螺仪用于精密测量科学和技术,人们正在探讨如何提高原子干涉陀螺仪测量精度的命题。原子干涉陀螺仪的测量精度主要取决于两个方面:其一是如何增大原子干涉环路面积;其二是如何尽可能地降低原子干涉条纹的相位噪声。一方面,随着激光冷却技术的发展和成熟,冷原子干涉陀螺仪将在小型化、集成化等方面更具优势,且在长航时高精度惯性导航定位方面具有更大的发展潜力,因此,研制冷原子干涉陀螺仪对发展我国长航时高精度惯性导航定位技术有着重要的意义;另一方面,振动噪声是限制高精度原子干涉陀螺仪的最主要因素,原子束流相对受重力的影响更小,从灵敏度函数分析可知,在不考虑尺寸限制的情况下,采用拉曼激光相干操作原子束流的方案更适合研制大型高精度原子干涉陀螺仪,可用于广义相对论检验等精密测量物理[19]。
本文综述了原子干涉陀螺仪的研究进展和发展趋势。首先介绍了广义相对论检验对原子干涉陀螺仪的需求,然后介绍了原子干涉陀螺仪在惯性导航定位方面的应用技术。在此基础上,结合原子干涉陀螺仪在精密测量和应用技术领域的需求,综述了在原子干涉陀螺仪方面取得的研究成果和研究进展。最后,对原子干涉陀螺仪未来的发展前景和发展趋势做出了分析和展望。
1 原子干涉陀螺仪广义相对论检验
广义相对论和量子力学是现代物理的两大支柱,如何将量子理论中的概念应用到广义相对论的框架中仍然是一个尚未解决的问题,虽然有证据显示广义相对论理论并不完善,但广义相对论效应检验一直是国际上物理学家极为关注的研究热点。广义相对论是描述物质间引力相互作用的理论,这一理论把引力场解释成时空弯曲。在广义相对论框架下,旋转物体和非旋转物体产生不同的引力场,例如,1916年荷兰物理学家威廉·德西特(Wil-lem de Sitter)预言引力场时空曲率造成测试质量的自旋角动量沿测地线进动,被称为测地线效应(Geodetic Effect)[20];1918年奥地利物理学家约瑟夫·兰斯(Joseph Lense)和汉斯·蒂林(Hans Thirr-ing)预言旋转物体对周围时空产生拖拽,即参考系拖曳效应(Frame-Dragging Effect),这种现象使得测试质量的状态和牛顿力学的结果产生偏差,也被叫作兰斯-蒂林效应(Lense-Thirring Effect)[21]。测地线效应和参考系拖曳效应为广义相对论效应检验提供了一种实验方法。2004年,美国国家航空航天局(Natio-nal Aeronautics and Space Administration,NASA)发射了一颗科学探测卫星引力探测器B(Gravity Probe B,GP-B),旨在利用超高精度陀螺仪探测地球周围的时空曲率和参考系拖曳,从而对爱因斯坦广义相对论的正确性和精确性进行检验。GP-B的研发历史可追溯到20世纪60年代[22],至2004年正式升空长达40多年,耗资达7亿5000万美元。探测卫星的飞行持续到2005年,共采集了1年的数据,其后任务进入到了数据分析阶段,2011年公开发表的结果证实了广义相对论所预言的测地线效应的准确度达到0.28%,所预言的兰斯-蒂林效应的准确度为19%,与检验目标还有量级的差距[23]。提高兰斯-蒂林效应的测量精度非常必要,在地面独立测量兰斯-蒂林效应对检验广义相对论效应有着重要的意义。随着陀螺仪技术的发展,人们开始讨论在地面实验室使用大型激光陀螺仪测量兰斯-蒂林效应的方案[24-25]。研制高精度陀螺仪是检验广义相对论效应首先要考虑的问题,作为广义相对论检验的雏形,人们开始研制大型环形激光陀螺仪装置。例如,意大利实现了3.6m×3.6m的激光陀螺仪(GINGERino),分辨率为3×10-11(rad/s)@500s[26];德国实现了4m×4m的激光陀螺仪(G Ring),分辨率为2×10-12(rad/s)@1800s[27],还在研制21m×17.5m 的大型激光陀螺仪(UG-1)[28-29];新西兰实现了39.7m×21m的大型激光陀螺仪(UG2),分辨率为2.8×10-12(rad/s)@2000s[30];我国也非常重视大型激光陀螺仪的研制,华中科技大学等开展了相关研究工作,分辨率为2×10-9(rad/s)@1000s[31]。
原子干涉陀螺仪是测量转动信息的仪器,在广义相对论框架下,考虑引力效应,利用原子干涉陀螺仪也可以检验广义相对论效应,采用不同研究方案独立地检验广义相对论效应能够更好地排除系统误差,有利于提高广义相对论效应检验的可靠性。原子干涉仪的原理是利用拉曼激光相干操作原子波包,实现原子波包的分束、反射和合束,从而形成原子干涉环路,原子干涉条纹的相移可表示为
δФ=Keff·gT2+2Keff·(Ω×v)T2+φlaser
(1)
其中,Keff为拉曼激光的有效波矢;T为两个拉曼激光脉冲之间的时间间隔;v为原子的运动速度;g为原子感受到的重力加速度;Ω为原子干涉环路感受到的转动信息;φlaser为原子干涉环路感受到的激光相位。式(1)中右边第一项为重力引起的相移,第二项为萨格纳克效应引起的相移。当把原子干涉陀螺仪放置在地球表面实验室时,在广义相对论框架下,考虑地球重力和自转引起的萨格纳克效应、测地线效应和兰斯-蒂林效应,原子干涉条纹的总相移可表示为
δΦ≅Keff·gT2+2KeffvT2ΩE[cos(θ+ψ)-
sinθsinψ)]+φlaser
(2)
其中,r为原子干涉陀螺仪的位置;M为地球的质量;ΩE为地球自转速度;RE为地球的平均半径;θ为原子干涉陀螺仪所处位置的余纬;ψ为原子干涉陀螺仪指向和所处位置地球半径方向的余角。当原子的运动速度相反时,式(2)中地球自转效应引起的原子干涉条纹的相移也是相反的。因此,采用空间对称的双原子干涉环路,通过差分测量的方法扣除重力效应和抑制激光相位等外部环境噪声,地球自转效应引起的双环路原子干涉条纹的相移可表示为
(3)
式(3)方括号中三项表达式分别代表着不同的含义,第一项为地球自转引起的萨格纳克效应;第二项为地球自转引起的测地线效应;第三项为地球自转引起的兰斯-蒂林效应。可以看出,通过设置原子干涉陀螺仪的指向(ψ),可以分离萨格纳克效应、测地线效应和兰斯-蒂林效应,并检验广义相对论效应。以上三项效应均由地球自转引起,因此,地球自转速度的精确测量非常重要。
通过精确测量地球自转信息可以检验广义相对论预言的兰斯-蒂林效应。理论分析表明,为了检验广义相对论效应,在武汉建立原子干涉陀螺仪装置,如果测地线效应和兰斯-蒂林效应要达到1%的检验精度,其分辨率需要达到3.5×10-14rad/s,意味着地球自转速度的测量精度要优于10-9。目前,原子干涉陀螺仪的分辨率为3.5×10-10rad/s,距离检验广义相对论效应尚有较大的差距。然而,随着近年来原子干涉陀螺仪的快速发展,有望尽早达到检验广义相对论效应所需的精度。从式(3)也可以看出,原子干涉陀螺仪的灵敏度与干涉长度平方成正比,经过前期分析,研制大型原子干涉陀螺仪(长度20m)的预期分辨率可以达到检验广义相对论效应的精度,长时间积分后可以将广义相对论效应检验精度提高到优于1%的水平。因此,研制大型原子干涉陀螺仪有着重要的意义,并提出了通过大型原子干涉陀螺仪实现在武汉纬度检验广义相对论效应的方案[19]。
2 原子干涉陀螺仪监控导航技术
在高精度长航时惯性导航定位方面,陀螺仪作为其核心关键器件,扮演着非常重要的角色,原子干涉陀螺仪具有很高的灵敏度和很好的零偏稳定性。从目前的研究进展来看,冷原子干涉陀螺仪的精度提升潜力巨大,是高精度惯性导航技术最有竞争力的候选之一;然而,由于工作模式和操控技术的限制,冷原子干涉陀螺仪目前还不能满足惯性导航系统的应用需求。冷原子干涉陀螺仪的实际应用主要受限于以下三个方面:1)典型工作模式下,冷原子干涉陀螺仪的采样率不高。为提高冷原子陀螺的转动测量精度,需要降低原子的温度以保持较窄的原子速度分布,进而提高原子相干性、改善原子干涉信号的信噪比。同时还需要尽可能地增大原子干涉环路面积,然而,随着原子干涉环路面积的增大,冷原子干涉陀螺仪的测量周期也随之增加,限制了冷原子干涉陀螺仪采样率的提高[13,32]。2)非连续的工作模式不能实时测量载体完整的动态信息。例如,冷原子团制备需要一定时间,而这段时间原子没有参与到转动测量中,导致冷原子干涉陀螺仪在测量周期中出现死时间。冷原子的快速装载、原子冷却与原子干涉过程交替运行等技术为解决死时间提出了新的思路[33],但是尚未完全解决死时间的问题。3)冷原子干涉陀螺仪在转动角速度测量过程中,与重力加速度耦合在一起,改变了原子的运动轨迹,在一定程度上限制了冷原子干涉陀螺仪的角速度测量范围[34]。
高精度惯性导航系统对陀螺仪的采样率和长期稳定性要求较高,通常情况下,通过增加原子的自由演化时间来提高冷原子干涉陀螺仪的灵敏度和减小漂移。然而,增加自由演化时间会降低冷原子干涉陀螺仪的采样率。原子干涉陀螺仪具有好的长期稳定性,但是采样率较低,相较而言,光纤陀螺仪采样率较高,但是漂移较大,且长期稳定性较差。为了充分发挥冷原子干涉陀螺仪长期漂移小的优点、降低对冷原子陀螺仪采样率的要求,借鉴了组合守时系统[35-36]和组合导航系统[37-38]的理念,实现了基于冷原子陀螺仪驾驭光纤陀螺仪的组合陀螺仪。该组合陀螺仪由冷原子干涉陀螺仪和光纤陀螺仪构成,利用高精度冷原子干涉陀螺仪校正光纤陀螺仪,以抑制光纤陀螺仪漂移导致的误差发散,从而提高长期稳定性。将原子干涉陀螺仪和光纤陀螺仪组合使用,可以改善陀螺仪的采样率和长期稳定性。例如,通过建立基于冷原子陀螺仪和光纤陀螺仪的组合陀螺仪模型及其导航误差模型,将冷原子干涉陀螺仪和光纤陀螺仪测量得到的转动数据传输到卡尔曼滤波器,解算得到输出校正数据,在不同的动态条件下,滤波器通过计算两组转动角速度数据的协方差,评估其测量精度的变化,对校正量的权重进行修正。在高动态工作环境中,测量精度可能会变差,此时滤波器能够快速反应,通过降低其修正的权重,使组合陀螺仪始终保持最佳测量数据输出。通过输出校正数据对光纤陀螺的输出数据进行反馈,得到最终的转动角速度数据。本文分析了校正频率对组合陀螺仪漂移的影响和组合陀螺仪的导航误差,结果表明,该组合陀螺仪方案兼顾了冷原子干涉陀螺漂移小和光纤陀螺采样率高的优点,有效减小了导航位置误差,原子干涉陀螺仪监控导航技术有望用于高精度惯性导航系统[39]。
3 原子干涉陀螺仪研究进展
原子干涉陀螺仪是利用原子干涉和萨格纳克效应来测量转动的仪器,从前面的分析可以看出,原子干涉陀螺仪在广义相对论检验等精密测量物理研究和长航时高精度惯性导航定位应用技术方面均有着重要的应用前景。本文从以下几个方面来介绍精密测量院在原子干涉陀螺仪方面的研究工作。
3.1 冷原子干涉仪
精密测量院是国内率先开展冷原子干涉仪的研究单位。2003年,开始搭建冷原子干涉仪装置,先后实现了原子的激光冷却、原子的横向推载、原子的受激拉曼跃迁、原子的相干操作、原子干涉和荧光探测等,并实现了冷原子干涉仪[4]。
冷原子干涉仪的实验装置示意图如图1所示。首先,为了囚禁和冷却原子,需要将冷却光和回泵光同时作用在原子上,采用六束冷却光和一对反亥姆霍兹线圈将原子气体囚禁在真空腔体中,从而实现了激光冷却和囚禁。采用近共振的激光将冷原子从囚禁区域推载,使冷原子团沿着水平方向从左向右飞行,在此过程中,原子被泵浦光抽运到其中的一个基态。然后,采用三对同向传播的拉曼激光相干操作冷原子,第一个拉曼脉冲使得原子相干分束,将其制备成两个基态的相干叠加态;经过一段时间的自由演化后,第二个拉曼脉冲使得原子合束,原子布居数在两个基态之间发生反转;再经过一段时间的自由演化后,第三个拉曼脉冲使得原子波包相干重组,从而实现原子干涉仪。最后,采用激光诱导荧光的方法对原子布居数进行探测,由于原子保持了很好的相干性,可观测到原子干涉条纹。
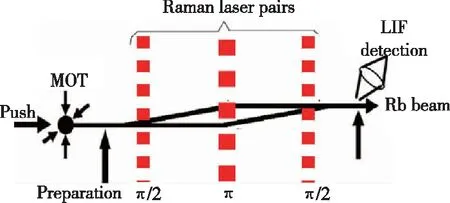
图1 冷原子干涉仪实验装置示意图Fig.1 Schematic diagram of experimental device of cold atom interferometer
在原子干涉仪中要相干地对原子波包分束和合束,并保证原子波包在自由演化过程中保持其相干特性。本文采用三束同向传播的拉曼激光完成了π/2-π-π/2型原子干涉仪,在实验中,三对拉曼激光由同一根光纤导引到原子干涉区,并在原子干涉区域采用λ/2波片和偏振分束器(Polarizing Beam Splitter,PBS)实现了三对拉曼激光脉冲序列,每个PBS与原子干涉窗口之间放置一个λ/4波片,以保证三对拉曼激光均为圆偏振光(σ+,σ+)。由于磁场的分布对受激拉曼过程有着很大的影响,在原子干涉区沿着三对拉曼激光的传播方向加一个固定的磁场,从而保证了量子化轴的方向;同时,采用三对亥姆霍兹线圈对原子干涉区的剩余磁场进行补偿,此时,能够严格定义π/2-π-π/2的拉曼激光脉冲序列。当扫描第三个拉曼激光脉冲的相位时,得到的拉曼型原子干涉条纹如图2所示,得到了两个周期的冷原子干涉条纹,与拉曼型原子干涉条纹的对比度达到了37.5%[4]。
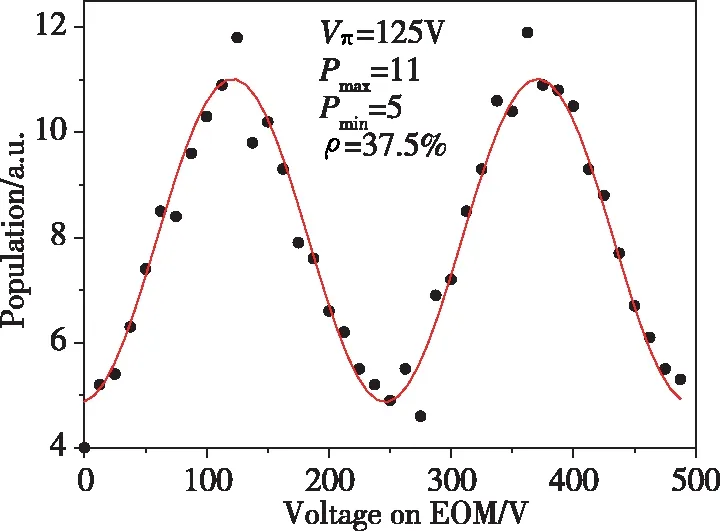
图2 观察到的冷原子干涉条纹Fig.2 Interference fringe observed in cold atom interferometer
3.2 萨格纳克效应
在此基础上,采用相向传播的拉曼激光相干操作原子,从图3(a)可以看出[11],较同向传播的拉曼激光,原子将感受到相向传播的拉曼激光双光子的反冲动量,并能建立更大面积的原子干涉环路。用相向传播的拉曼激光相干操作原子,线偏振的拉曼激光沿着与原子运动轨迹垂直的方向传播,拉曼激光含有两个频率ω0和ω0+δ,经过一个λ/4波片后,拉曼光沿原路返回,相向传播的两对拉曼激光在空间上严格重合,此时两对对射拉曼激光的偏振相互垂直。由于线偏振的拉曼激光与原子相互作用时双光子跃迁几率可忽略,同向传播的拉曼激光不与原子发生相互作用,此时只有相向传播的拉曼激光与原子相互作用,实现了相向传播拉曼激光作用后的双光子拉曼跃迁和双光子动量转移,进而能够构建原子分束和反射镜。原子干涉环路的示意图如图3(b)所示,考虑到相向传播拉曼激光与原子相互作用时引起的双光子反冲动量,利用空间分离的三对对射的拉曼激光,能够实现原子波包的相干分束、合束和重组,从而实现原子干涉环路,并可观察原子干涉条纹。

(a)受激拉曼跃迁
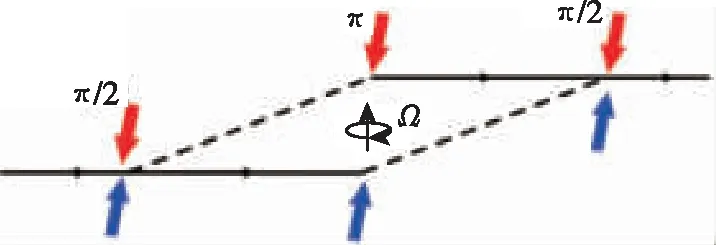
(b)原子干涉陀螺仪图3 受激拉曼跃迁和原子干涉陀螺仪的原理示意图Fig.3 Schematic diagram of stimulated Raman transitions and atomic interference gyroscope
为了验证原子干涉陀螺效应,将装置放置在高精度转动测量平台上,观察转动引起的干涉条纹的相位移动。由于萨格纳克效应的存在,当转台的转动速度改变时,将引起原子干涉条纹的相位移动,在不同的转速下,观察到的原子干涉条纹如图4所示。图4中,绿色三角形为当转台静止时测量得到的原子干涉条纹,黑色方块为当转台以0.05(°)/s的转速正转时观察到的原子干涉条纹,红色圆点为当转台以-0.05(°)/s的转速反转时观察到的原子干涉条纹,三条原子干涉条纹分别用正弦曲线拟合。从图4可以看出,在实验中观察到了转动引起的原子干涉条纹的相位移动,且其与转动平台的转动角速度是线性依赖关系,实验结果与理论分析相当吻合,从而在实验上证实了原子干涉环路中的萨格纳克效应,为进一步构建原子干涉陀螺仪提供了理论和实验依据。
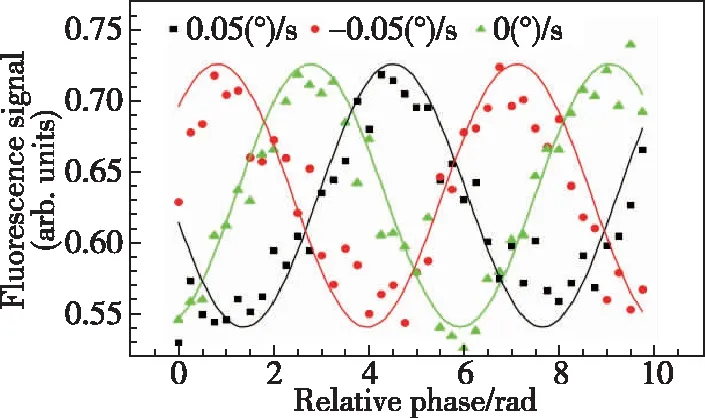
图4 不同转速下的冷原子干涉条纹Fig.4 Cold atomic interference fringes observed at different rotation rates
3.3 地球自转速度测量
在前面研究的基础上,搭建了一套双环路冷原子干涉陀螺仪,实现了冷原子干涉陀螺仪及其对地球自转速度的测量[12]。冷原子干涉陀螺仪的示意图如图5所示,原子被分别囚禁在两个三维磁光阱中,采用移动光学粘胶技术,通过调节囚禁光频率失谐将冷原子同时对抛,以相反方向沿着相同的抛物线轨迹形成冷原子束;采用光泵技术将原子制备到基态作为初始内态,使用π/2-π-π/2型脉冲的拉曼激光脉冲相干地操作原子,形成双原子干涉环路,并用激光诱导荧光测量另一个基态的布居数分布。同样,当扫描第三个拉曼激光脉冲的相位时,可以得到双原子干涉条纹。在双原子干涉环路中,转动信息转化成原子干涉条纹的相位信息,利用同步差分检测双原子干涉条纹,扣除重力引起的相移且共模抑制了激光相位噪声,通过测量双原子干涉条纹的差分相位变化能够提取转动信息,从而实现原子干涉陀螺仪。
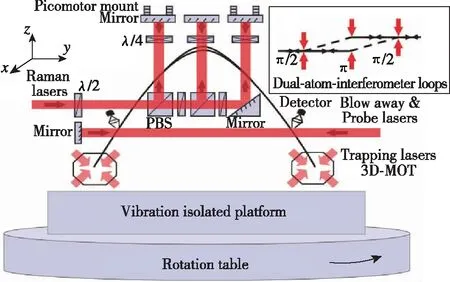
图5 双环路冷原子干涉陀螺仪实验装置示意图Fig.5 Schematic diagram of dual-loop cold atomic interference gyroscope
整个装置放置在转动平台和稳定平台上。由于原子干涉陀螺仪的灵敏度正比于自由演化时间的平方,延长原子自由演化时间可增大原子干涉环路面积。如图5所示,采用分离拉曼激光相干操作原子,在空间上用PBS和λ/2波片将一束拉曼激光分成三束拉曼激光,然后沿着与重力相反的方向传播,通过λ/4波片和反射镜后,形成了三对相向传播的拉曼激光,用拉曼激光脉冲共模地相干操作两束相向传播的冷原子,同时调制第三个拉曼激光脉冲的相位,可以观察到双原子干涉条纹,如图6所示,原子干涉条纹的对比度分别为18%和20%。
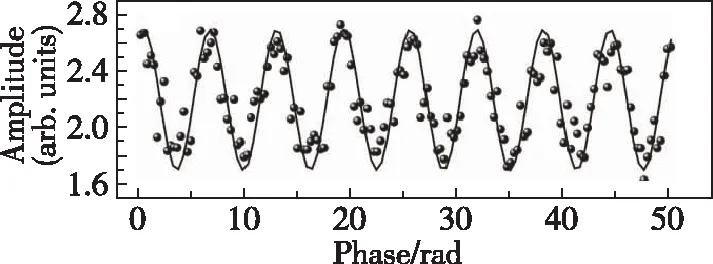
(a)
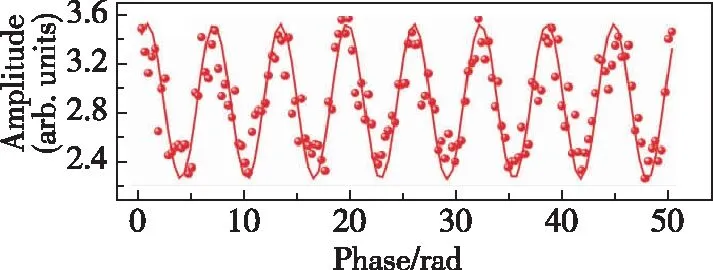
(b)图6 双环路冷原子干涉条纹Fig.6 Cold atomic interference fringes observed in dual-loop interferometers
从上面的研究可以看出,在实验中,通过采用双原子干涉环路,重力加速度和共模相位噪声能够被很好地消除,为转动速度的精确测量奠定了基础。在此基础上,将原子干涉陀螺仪装置放置在转动测试平台上,如图5所示。随着转动平台在水平面转动时,地球自转在原子干涉环路上的投影将发生改变,可以通过转动平台的方位角来测量地球自转的变化,测试结果如图7中黑点所示。横坐标为转动平台的位置,纵坐标为双环路原子干涉条纹的相位差,可以看出,相位的变化与转动平台的角度成正弦关系,符合地球自转速度在原子干涉环路方向的投影关系,通过正弦拟合测得的地球自转速度与国际地球自转服务(International Earth Rotation Service,IERS)给出的数据一致。多次测量结果的残余误差如图7中红色三角形所示,转动测量误差小于0.5%[12]。在此基础上,近期设计了一套平抛的双环路原子干涉陀螺仪,原子干涉环路的面积提高到了1.2cm2,使得新装置的标度因子提高了6倍,研制出的高精度原子干涉陀螺仪的灵敏度为1.5×10-7(rad/s)/Hz1/2,分辨率为9.5×10-10(rad/s)@20000s[15]。
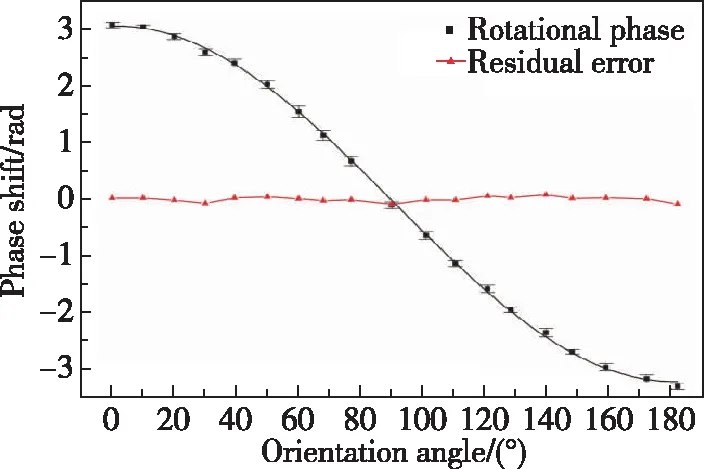
图7 不同方位下的冷原子干涉条纹的相移Fig.7 Phase shift of cold atomic interference fringes observed at different azimuth angles
3.4 原子束流干涉陀螺仪
在此基础上,提出了采用大型原子束流干涉陀螺仪检验广义相对论效应的构想[19]。物理系统装置如图8所示。左右对称的两个原子炉产生铷原子束流,采用毛细管结构增加原子数目,对射的原子束通过二维冷却区域时进行横向冷却;在原子初态制备区域,泵浦光将原子制备到其中一个基态;当原子进入原子干涉区域时,三对大尺度空间分离的对射拉曼激光(π/2-π-π/2)同步相干操作两路原子束的内态和外态;当原子布居数发生相干转移时,原子获得光子动量,实现原子波包的相干分束、合束和重组,从而构建双原子干涉环路;在原子信号探测区域,采用两个快速响应的光电探测器观察处于不同内态的原子数目,从而得到原子干涉条纹。在原子干涉区域,采用三套坡莫合金磁场屏蔽系统抑制地磁场和杂散磁场的影响,并采用三对亥姆霍兹线圈对剩余磁场进行补偿,在磁场屏蔽系统内沿着拉曼激光束传播的方向施加均匀偏置磁场,以保证量子化轴的方向。
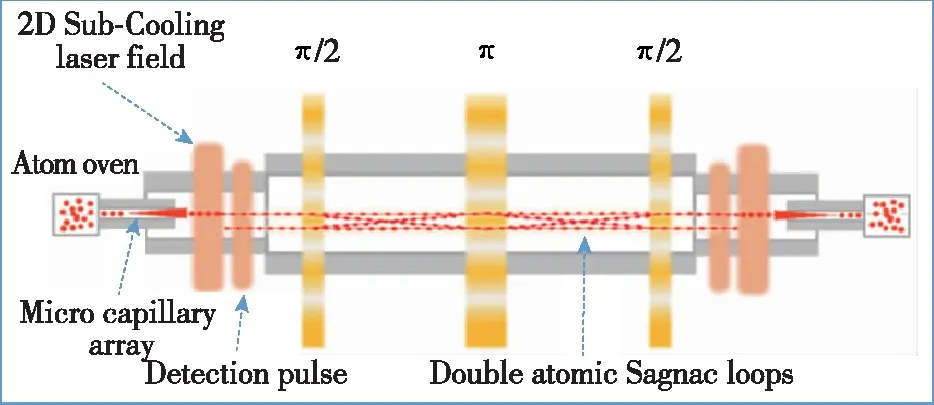
图8 大型原子干涉陀螺仪装置的原理示意图Fig.8 Schematic diagram of large-scale atomic interference gyroscope
采用原子束流方案研制原子干涉陀螺仪装置,主要考虑以下两个方面:其一是由于原子干涉条纹的相位噪声与参与干涉的原子数目相关,原子干涉陀螺仪的灵敏度通常正比于1/N1/2,而研制高精度原子干涉陀螺仪需要更多的原子数目。与用磁光阱(Magneto-Optical Trap, MOT)技术的冷原子方案相比,采用原子束流技术的方案,可将原子数目提高106倍以上,在标度因子相同的情况下,理论上原子干涉陀螺仪的灵敏度将会提高3个数量级以上。其二是原子在重力场中轨迹的变化和振动噪声的影响,原子束流方案更适合大型原子干涉陀螺仪研制。因此,研制大型原子束流干涉陀螺仪(长度大于20m),通过监测系统实现原子干涉陀螺仪转动信号的提取、长期监测和数据处理等,实现地球自转速度的精确测量,为后续实现广义相对论效应检验奠定了基础。相较而言,冷原子方案更适合小型惯性导航技术应用。
作为地面大型激光陀螺仪和原子干涉陀螺仪检验广义相对论的雏形,目前,原子干涉陀螺仪(绿色三角形:斯坦福大学[17-18];蓝色圆点:巴黎天文台[1,13-14];红色五角星:精密测量院[11-12,15])和大型激光陀螺仪(黑色方框:LG-UG2,新西兰[30];LG-G Ring,德国[27];LG-GINGERion,意大利[26];LG-PRC,华中科技大学[31])的分辨率指标随时间的关系如图9所示。可以看出,在大型激光陀螺仪研制过程中,尽管不同的研究方案还在持续探索,但是面临噪声干扰等技术瓶颈,近年来尚未有较大的突破。也可以看出,尽管原子干涉陀螺仪与大型激光陀螺仪尚有差距,但是原子干涉陀螺仪仍有很大的潜力可挖掘。高精度原子干涉陀螺仪装置的研制,可用于地球自转速度的高精度测量,为原子干涉陀螺仪广义相对论检验储备技术,也可用于地球极移、统一时间(UT1)和惯性陀螺标定等应用。
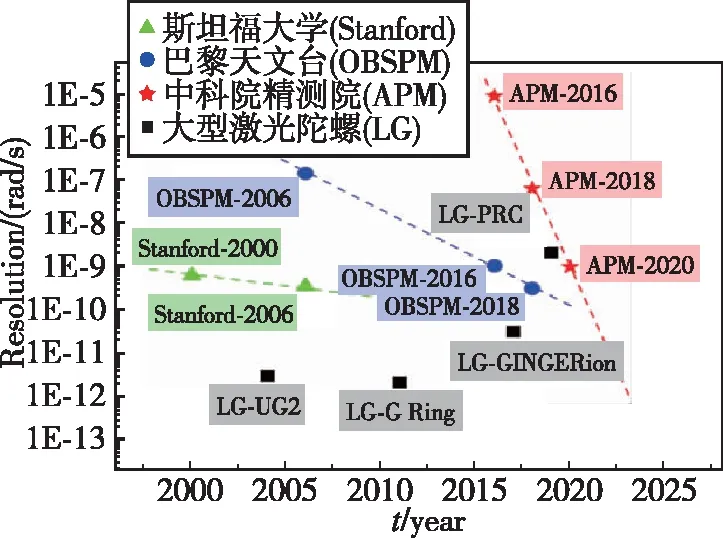
图9 原子干涉陀螺仪与激光陀螺仪指标对比Fig.9 Performance comparison between atomic interference gyroscope and laser gyroscope
4 总结与展望
原子干涉陀螺仪具有巨大的发展潜力,未来有望在精密测量和应用技术方面取得重要的科技成果。欧美发达国家在持续大力发展高精度原子干涉陀螺仪,我们国家也非常重视原子干涉陀螺仪的发展,且正处于关键时期,把握时机非常关键。随着我国科技实力的提升以及实验技术方面经验的积累,我们在原子干涉陀螺技术方面的研究水平已有大幅度提升。推动原子干涉陀螺仪技术的发展,使其能够尽快应用在水下及空间探测领域有着重要意义。从原子干涉陀螺仪的发展来看,冷原子干涉陀螺仪已经取得了较大的进展,主要包括三脉冲冷原子干涉陀螺仪和四脉冲冷原子干涉陀螺仪。从应用角度考虑,三脉冲原子干涉陀螺仪的应用场景更广,且更为普适,但难度较大;四脉冲原子干涉陀螺仪的环路面积与重力加速度相关联,在空间微重力环境或导航应用领域将会受到很大的限制,使得应用场景受限;原子束流干涉陀螺仪相对发展较缓,主要受限于原子束流的横向温度很难实现较好的亚多普勒冷却,成为原子束流干涉陀螺仪的制约因素。
未来需要从以下几方面开展原子干涉陀螺仪研究,其一是瞄准精密测量科学研究,进一步提高原子干涉陀螺仪的精度。目前,制约原子干涉技术精密测量精度的主要因素是原子干涉环路面积较小,需通过进一步理论与实验探索,提升原子干涉陀螺仪的测量精度。其二是瞄准惯性导航应用技术,开展原子干涉陀螺仪工程技术攻关。制约原子干涉陀螺仪技术应用的主要因素是目前集成度较低,体积较大,难以在中、小型载体上应用。其三是原子干涉陀螺仪的测量带宽较小,制约其应用范围。针对以上应用困难,一方面,可通过原子快速装载技术和连续交替操作的方案来提高原子干涉陀螺仪的测量精度和测量带宽,扩大应用范围;另一方面,可通过对关键部组件的小型化研究,减小整机体积,加快工程应用进度。
