基于仿生鱼体结构的平板减阻方法
2021-03-10李广浩刘贵杰
李广浩, 冯 娜,2, 刘贵杰
基于仿生鱼体结构的平板减阻方法
李广浩1, 冯 娜1,2, 刘贵杰1
(1. 中国海洋大学 工程学院, 山东 青岛, 266100; 2. 山东交通职业学院 航海系, 山东 潍坊, 261206)
海洋环境复杂, 流速变化幅度大, 一般的减阻方式在海洋中表现不稳定, 为更好地适应海洋环境, 文中提出一种新型减阻方法, 并通过数值仿真与试验的方法验证了减阻效果。首先根据仿生学原理, 选择推进方式为靠身体/尾鳍游动模式的鱼类作为研究对象, 仿照鱼体重新建立模型。其次, 通过数值仿真的方法研究模型长度、高度和厚度对减阻效果的影响, 总结减阻规律并初步探究其减阻机理。通过流体试验验证了数值仿真的正确性。试验结果表明, 随着模型长度的增加, 其减阻效果会逐渐变差, 但产生最佳减阻效果时的流速并不受长度的影响; 模型高度的变化对整体减阻效果有很大影响; 随着厚度的增加, 模型将在更大的流速范围内出现减阻效果。重新建立的模型可以有效降低阻力, 并具有广泛的流速适用范围, 可以更好地适应海洋环境。
仿生鱼; 减阻; 流体试验
0 引言
能源问题一直制约着水下航行器的发展, 如何在水下有效节约能源受到越来越多人的关注。众所周知, 不同流体因为黏性不同导致摩擦阻力有很大区别, 航行器在水中所受阻力约为空气中的800倍。相关研究表明, 水下航行器运动时所受的粘滞阻力占总阻力的40%~80%[1], 水下航行器的大部分能源用于克服航行阻力。
为了更好地适应水下环境, 鱼类进化出了多种独特的结构。例如, 鲨鱼具有特殊的盾鳞结构, 这种结构可以减小游动时所受的阻力[2-3]。Bechert等[4]通过模拟鲨鱼皮肤的盾鳞结构得到了9.39%的减阻率。Zhang等[5]为阐述鲨鱼盾鳞结构的减阻机理, 通过扫描电镜(scanning electron microscope, SEM)技术研究发现盾鳞结构可以使流动更加稳定, 减小壁面粘滞阻力。海豚的柔性皮肤帮助海豚更快的游动[6-7]。英国生物学家Gary[8]发现, 当海豚以20 km/h的速度游动时, 理论上需要的能量约为食物摄入量的7倍, 这就是著名的Gary难题。Kramer[9]认为, 海豚的柔性皮肤可以抑制层流向湍流的转捩, 进而实现减阻效果, 同时采用人造生物皮肤覆盖的鱼雷验证减阻效果, 减阻率高达59%。Choi等[10]通过水洞试验分析, 得出柔性皮肤的减阻效果可达5%并且对边界层波动强度产生影响。除了上述特殊的减阻方法之外, 鱼的外形在减小阻力方面也起到了至关重要的作用。
根据鱼类推进特征可将鱼类推进模式分为2类: 身体/尾鳍游动(body and/or caudal fin, BCF)推进以及间鳍和对鳍推进(median and/or paired fins, MPF)[11]。相关文献表明, 85%的鱼类运动模式为BCF模式[12]。BCF模式的鱼类主要依靠鱼体和尾鳍的流线型以及其柔性协同作用实现高效游动, 其中, 鱼体的流线型外形可以有效降低阻力[13]。Barrett等[14]通过试验的方式证明流线型外形的减阻效果, 发现: 牵引流线型鱼状物体所需的功率明显小于以相同速度牵引笔直的物体所需功率。肖华攀等[15]探讨了流线形状的设计方法, 得出在二维层面上以半椭圆和抛物线构建的流线型阻力特性比较好。
目前存在的减阻方法主要依靠仿生生物皮肤, 如鲨鱼、海豚等, 这些方法产生减阻效果的对应流速范围相对较小, 无法适用复杂的海洋环境。为了解决这一问题, 文中基于鱼体外形提出一种新的减阻方法, 该方法可应用到船舶侧面、航行器表面等平坦壁面实现减阻效果, 拥有受环境影响小, 适用流速范围大, 无需额外能量输入的特点, 具有较高的工程价值。
1 基本理论
1.1 边界层理论
液体流经物体表面时, 在物体表面产生一个薄层, 黏性力主要在薄层内产生, 即认为黏性作用完全局限在薄层内, 这个薄层被称为边界层。边界层理论被广泛用于解释减阻机理, 边界层构成如图1所示。
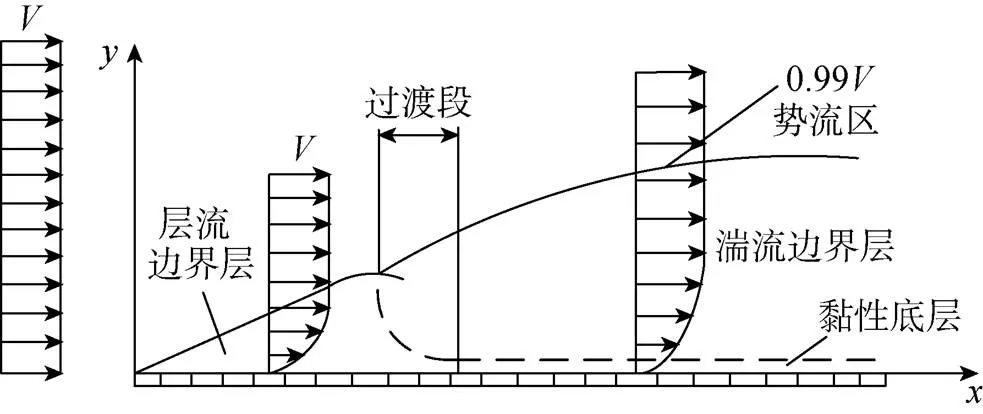
图1 边界层结构示意图
1.2 研究思路及水下阻力构成
研究思路如图2所示。
水下航行器在航行过程中所受阻力主要分为粘滞阻力和压差阻力(形状阻力)。
粘滞阻力是由于流体的粘度引起的。在靠近航行器的边界层内, 流速由0很快增加到主流场流速, 这个过程中粘滞阻力起主要的限制作用。水下航行器在航行过程中, 原本的物理场受到干扰。航行器的前端压力增加而后端压力降低, 这种不对称压力引起的阻力称为压差阻力, 该阻力大小与形状、迎流面积等因素有关。
2 试验模型及参数
2.1 建立模型
以BCF模式的游鱼作为仿生对象, 鱼体模型如图3(a)所示, 影响流线型的主要因素有长度、高度和厚度。对鱼体进行重新建模, 如图3(b)所示, 建模遵循半椭圆加抛物线原则[15]。其中为模型长度,为模型高度,为模型厚度(即鱼体厚度, 图中未标注)。
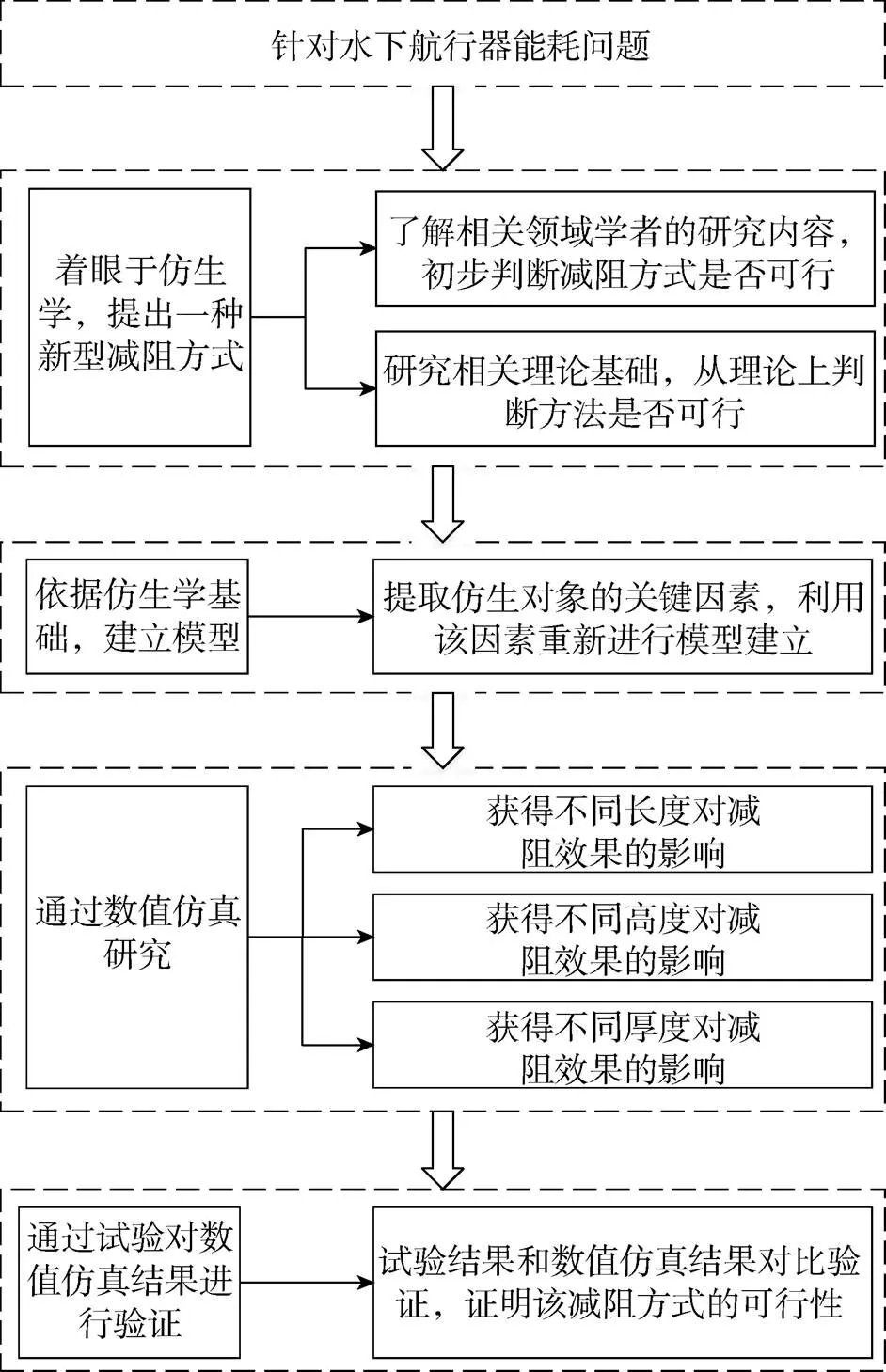
图2 研究思路流程图

图3 鱼体模型
2.2 模型参数设定
为探究不同长度、高度和厚度对减阻效果的影响, 依照控制变量试验原则, 建立如表1所示8个模型, 相互作为对照组, 探究减阻规律。
3 数值仿真及结果分析
3.1 数值仿真模型建立
建立如图4所示三维流域模型进行数值仿真, 其上表面为试验面, 带有试验模型, 下表面为对照面, 未施加任何试验模型。流场的长度为300 mm, 宽度和高度为150 mm。

表1 试验模型参数

图4 流域计算模型
利用流场分析预处理软件ICEM对流域模型进行网格划分。网格整体缩放比例为0.4, 网格数量为205 425 6, 第1层网格位于边界层内。通过划分不同数量的网格对比相对误差来验证网格无关性, 验证结果如表2所示, 近壁面网格划分如图5所示。
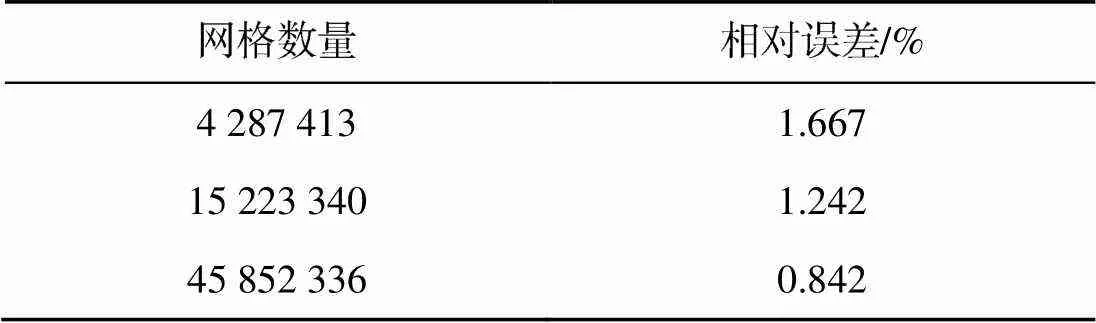
表2 网格无关性检验结果
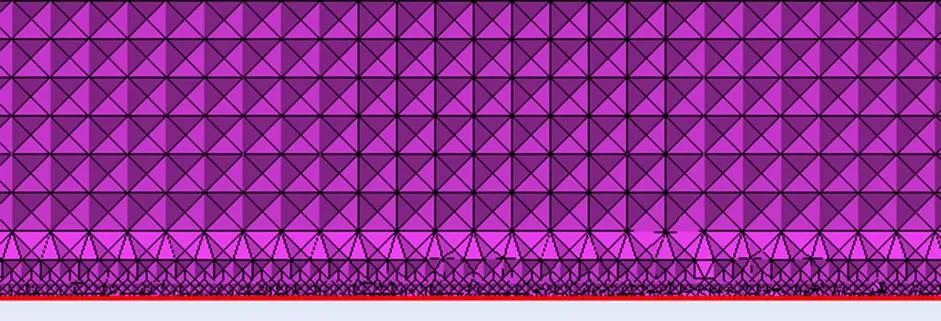
图5 近壁面网格划分示意图
采用FLUENT软件进行流场分析。流域入口设置为速度入口, 出口设置为自由流出口, 上下壁面设置为墙壁面, 无热交换。文中内容主要面向海洋工况进行数值仿真, 以湍流的形式进行研究, 经过对数值模型的雷诺数计算, 最终选用-湍流模型[16], 近壁面函数选用标准壁面函数。
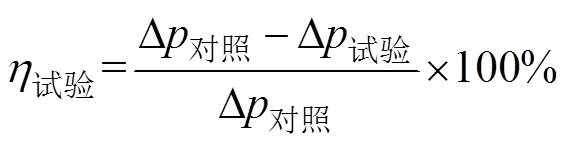
在流速相同的情况下, 上下壁面所受阻力的差值与对照面所受阻力的比值称为减阻率, 即
3.2 模型长度对减阻效果的影响
为研究模型不同长度对减阻效果的影响, 选择模型A, B和E作为研究对象。流场流速为1~ 10 m/s, 仿真结果如图6所示。

图6 流速为1~10 m/s时长度对减阻效果的影响
由图6可知, 在流速相同的情况下, 模型长度越长, 减阻效果越差。随着流速的增加, 3个模型的减阻效果均呈现下降的趋势, 可以推断最佳的减阻效果对应的流速在0~1 m/s范围内, 对该范围进行数值仿真, 结果如图7所示。
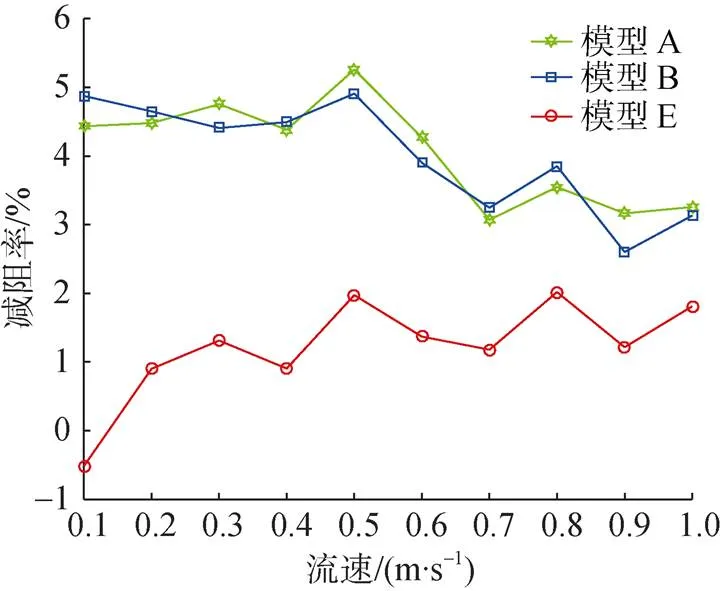
图7 流速为0~1 m/s时长度对减阻效果的影响
由图7可知, 3个试验模型虽然长度不同, 但在速度为0.5 m/s时表现出最好的减阻效果, 最高减阻率为5.26%。可知, 长度会影响减阻效果, 但不会影响最佳减阻效果出现的流速。
3.3 模型高度对减阻效果的影响
为了获得高度对减阻规律的影响, 选择模型A、C和D作为研究对象。流场流速为1~10 m/s, 仿真结果如图8所示。
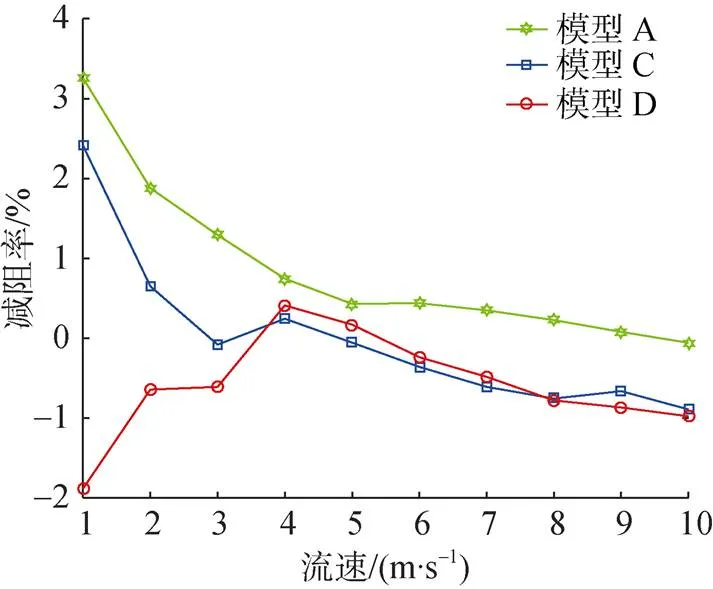
图8 流速为1~10 m/s时高度对减阻效果的影响
由图8可知, 模型A的减阻效果明显优于其余2种模型, 且随着流速的增大减阻效果呈现下降趋势, 模型D虽然呈现先增大后减小的趋势, 但整体不是在减阻反而是在增加阻力。模型A和C的最佳减阻效果应该出现在0~1 m/s处, 对0~1 m/s范围内的数值仿真, 结果如图9所示。
由图9可知, 3个不同模型最佳减阻效果的匹配速度为0.5 m/s或0.6 m/s, 虽不完全相同, 但相差很小。高度会对最佳减阻效果的匹配速度造成影响, 但影响效果不大, 高度的不同更容易造成整体减阻效果的差异。
3.4 模型厚度对减阻效果的影响
为了研究模型厚度对减阻效果的影响, 选择了模型D, F和G作为研究对象。流场流速为1~ 10 m/s, 数值仿真结果如图10所示。
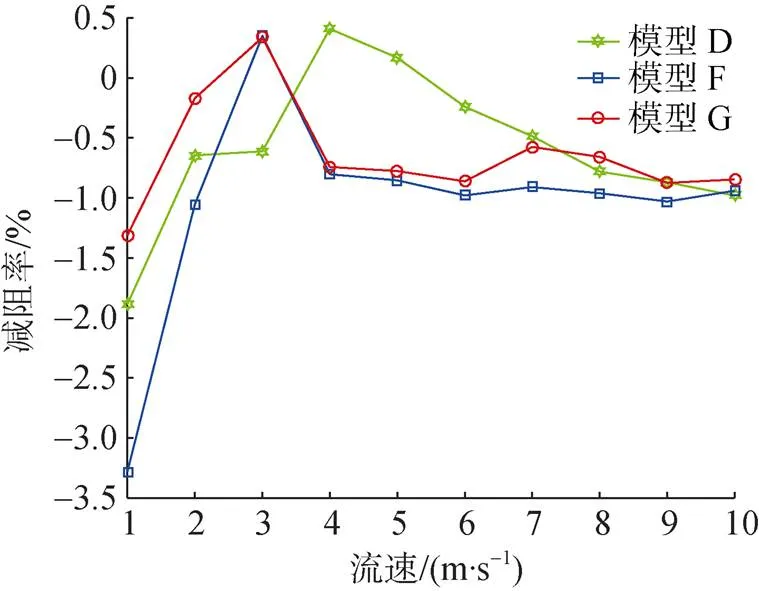
图10 流速为1~10 m/s时厚度对减阻效果的影响
由图10可知, 随着流速的增加, 3个模型的减阻效果均呈现先增大后减小, 但值得注意的是, 以减阻率为0为界限, 模型F仅能在很小的速度区间内呈现减阻效果, 模型D在减阻效果上优于其余2个模型。可知, 随着厚度的增加, 呈现减阻状态的速度区间将不断变大。
经过数值仿真分析可知, 无论哪种试验模型, 当流速过高时, 均出现了减阻率小于0的情况。这是因为随着流速的增加, 模型所受压差阻力迅速上升, 压差阻力的增加量远大于粘滞阻力的减小量, 故总体减阻率小于0。
在实际应用过程中, 一旦减阻率小于0就意味着能量消耗更多而非节约能量。值得注意的是, 若选用合适的模型则可以一定程度上避免这种情况的发生, 如整体减阻效果较好的模型B在流速为0.1~9 m/s范围内均呈现减阻效果, 即对于带有模型B的航行器而言, 当航速低于32.4 km/h时均有减阻效果。这个适用范围可满足目前大部分水下航行器的作业需求。
3.5 减阻机理探究
试验模型在水下所受阻力可分为压差阻力(形状阻力)和粘滞阻力。
压差阻力主要受迎流面积和形状的影响。形状的变化将导致边界层分离的变化, 从而产生压差阻力。流线型模型与相同面积的正方形模型相比, 前者所受阻力仅为后者的1/25[17]。由不同形状引起的压差阻力如图11所示。由此可见, 流线型可以获得更小的压差阻力, 有利于整体减阻现象的发生。
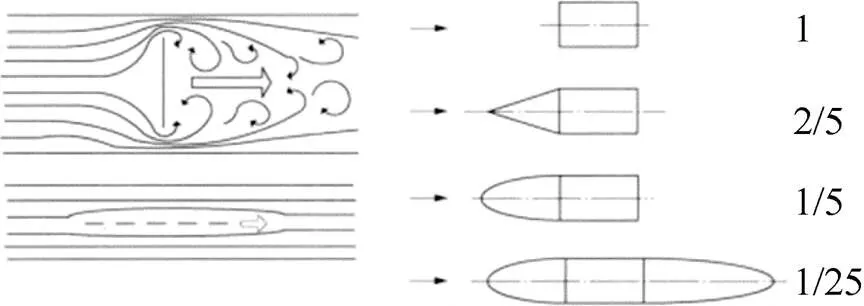
图11 不同形状压差阻力的差异

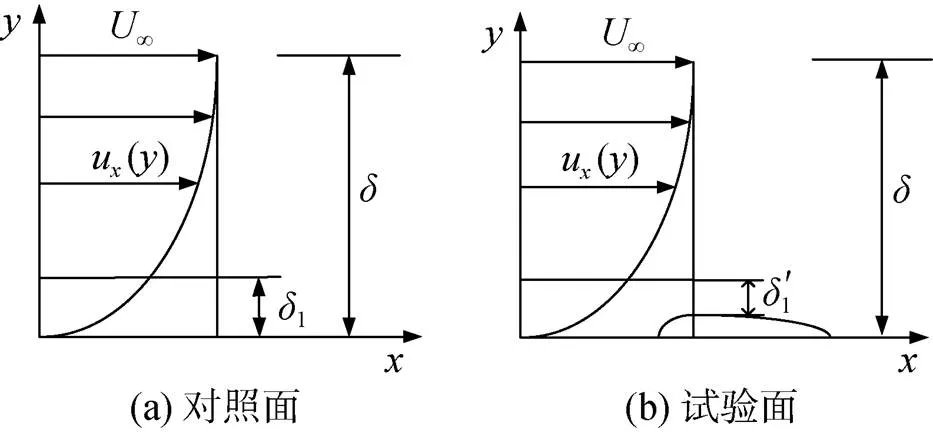
图12 对照面及试验面位移厚度
模型长度和高度的变化会影响减阻效果, 采用速度梯度图进行解释, 如图13所示。
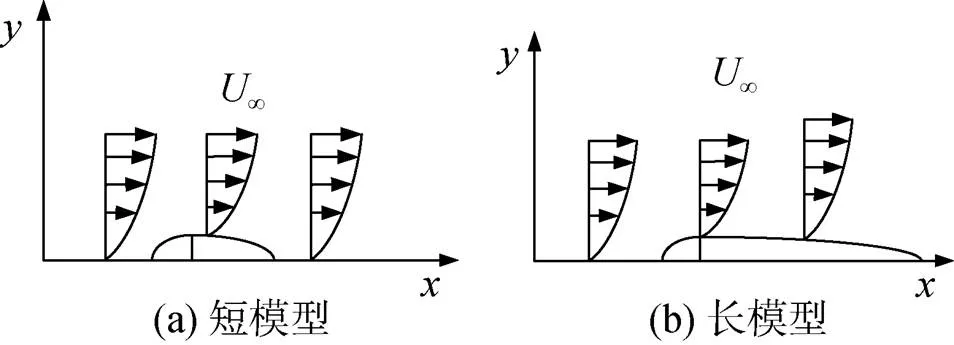
图13 模型速度梯度图
以试验模型长度对减阻影响为例, 流体本身具有黏性, 当试验模型自身长度比较短时, 对主流场的影响比较小, 此时边界层并未有明显改变, 如图14所示, 其速度梯度如图13(a)所示。当试验模型的长度较长时, 在模型厚度会有明显上升的速度梯度, 如图13(b)所示, 此时边界层发生改变, 不再产生减阻效果。
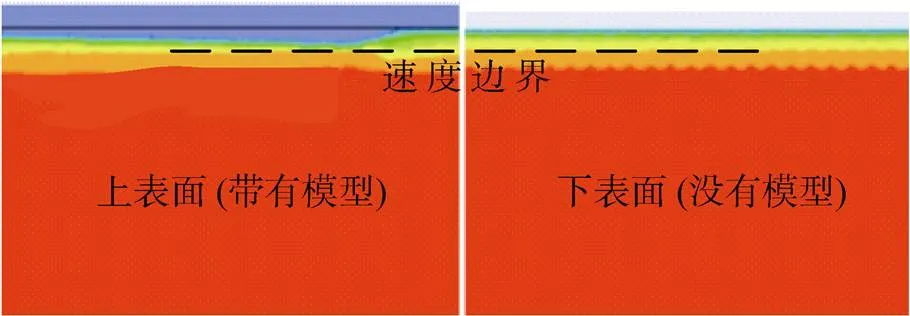
图14 较短模型对流场速度的影响
综上, 随着模型长度的增加, 减阻效果逐渐变差。模型高度变化对减阻效果的影响机理与长度变化对减阻效果的影响机理相同, 在此不作赘述。
模型厚度的增加虽然能在一定程度上减小粘滞阻力, 但模型厚度越厚, 承受水流直接冲击的面积越大, 对应的形状阻力越大。粘滞阻力的减小量远不及形状阻力增加量, 所以增加模型厚度往往出现增加阻力的现象。
当流速较大时, 虽然模型本身为流线型, 但在模型的后部出现了脱落涡, 这些脱落涡使压差阻力迅速增大, 自身减小的粘滞阻力远不及增大的压差阻力, 所以各模型在流速较高时, 均未表现出较好的减阻效果。
4 试验结果及分析
4.1 试验原理
为验证数值仿真结果的正确性, 通过流体试验进行对比验证。
当流体流经平板表面时会发生能量损失, 这部分能量主要用于克服阻力做功。流经平面的阻力越大, 其损失的能量就越多。损失的能量在宏观上表现为压力差, 这部分数据可以通过压力传感器来收集, 即可以压力来反应平板阻力的大小。
4.2 试验装置参数
试验装置如图15(a)所示, 试验装置为矩形通道, 通道前后设置有压力传感器, 压力传感器数据经单片机传至PC上位机, 可直接读取压力差数据, 试验中采用的传感器为MS5803-07BA压力传感器, 该传感器具有精度高、分辨率高的优点, 最小分辨率可达4 Pa。传感器自带凝胶保护和防磁钢帽, 满足试验的精度要求和防水要求。流场由水泵提供, 水泵共有100个挡位, 可用于控制流场流速, 试验设备的具体参数见表3。试验模型如图15(b)所示, 具体数据见表1。
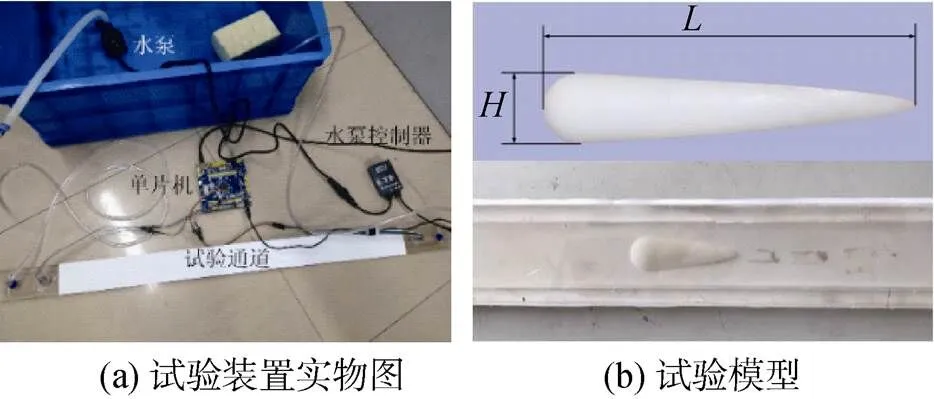
图15 试验装置及其模型图
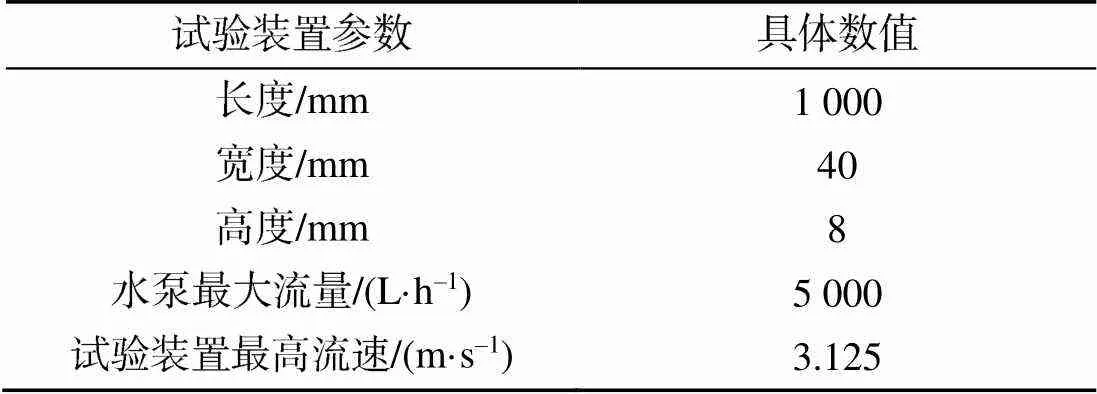
表3 试验装置具体参数
试验部分减阻率的数学表述为
4.3 试验结果分析
为研究模型长度对减阻效果的影响, 选用模型A、B和E进行试验, 试验结果如图16所示。
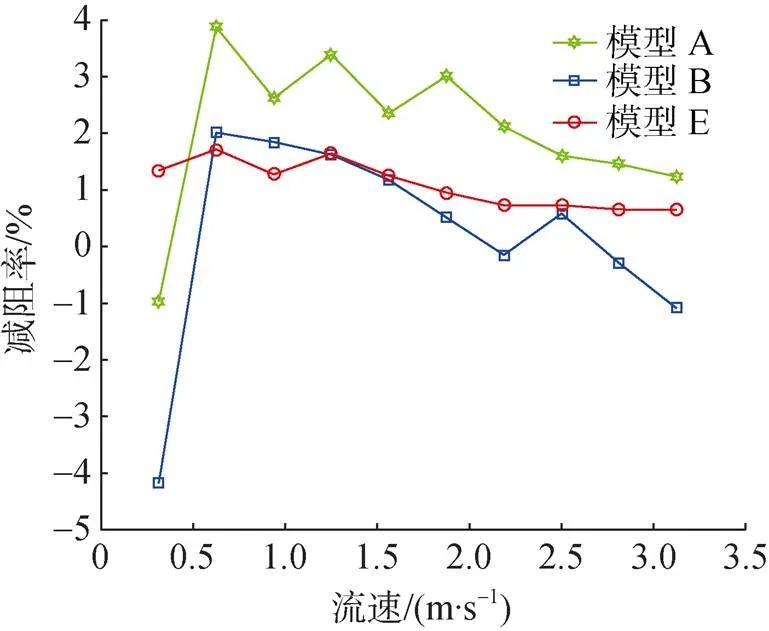
图16 试验中长度对减阻效果的影响
由图可知, 当试验矩形通道内的流速为0.625 m/s时, 3个模型的减阻效果最好, 试验中的最佳流速与数值仿真中的最佳流速相近, 印证了数值仿真结果的可靠性。
模型长度的不同可以影响减阻效果, 但不会影响最佳减阻效果的匹配流速。
为研究模型高度对减阻效果的影响, 选用模型A、C和D进行试验, 试验结果如图17所示。
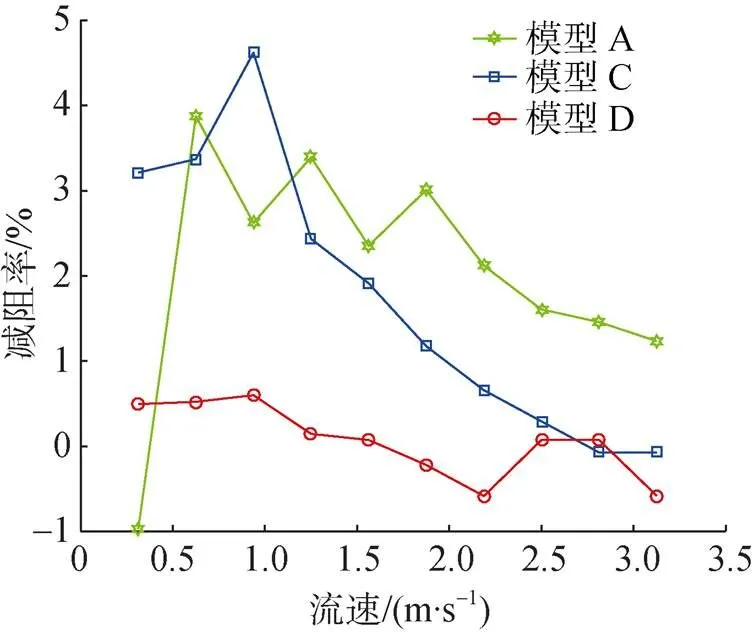
图17 试验中高度对减阻效果的影响
由图17可知, 高度对减阻效果的影响规律和数值仿真所得规律相同。模型A和D表现出了较好的减阻效果, 并且最佳减阻效率的匹配流速相近。
为研究模型厚度对减阻效果的影响, 选用模型D、F和G进行试验, 试验结果如图18所示。
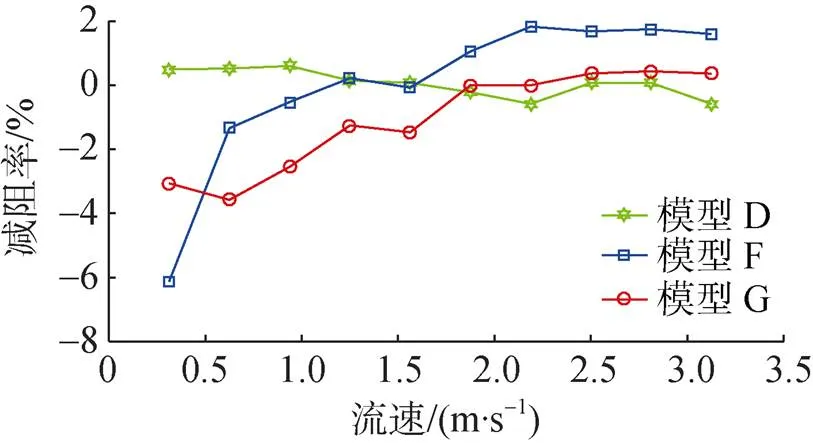
图18 试验中厚度对减阻效果的影响
在数值仿真结果中, 模型D、F、G在流速为3 m/s时才展现出减阻效果且模型D的减阻最差。由图18可知, 当流速大于2.2 m/s时, 模型F的减阻效果最好, 模型G减阻效果次之, 这与数值仿真规律相同。
5 结论
基于仿生学原理提出一种适用于平坦壁面的新型减阻方法, 并通过数值仿真和流体试验的方法进行分析, 得出以下结论:
1) 随着模型长度的增加, 减阻效果逐渐变差, 减阻模型产生最佳减阻效果时的流速不受模型长度的影响;
2) 模型高度会明显改变减阻效果, 随着模型高度的增加, 模型减阻效果会先变差后逐渐变好, 对产生最佳减阻效果的匹配流速产生微弱影响;
3) 随着模型厚度的增加, 模型产生减阻效果的流速范围会出现明显扩大。
文中方法可应用到船舶侧面等平坦壁面, 不受环境影响, 不需要额外的能量输入, 适用的流速范围广泛, 具有很高的工程潜力。
现阶段等工作仍有些许不足, 建立的试验模型体积较小, 在较大平面的使用时需要同时布置多个试验模型才能达到良好的减阻效果。但如何排布才能实现最佳的减阻效果, 不同模型之间会不会相互影响, 这些问题都需在下一步工作中开展相应研究。自然界中, 鱼类在迁徙过程中往往采用鱼群的形式, 生物学家发现鱼群结构有利于帮助鱼类节约能量, 能否将这种特殊的生物活动形式借鉴到工程中, 解决较大平面的模型布置问题, 这也是未来研究的方向之一。
[1] 刘庆萍. 水—固界面系统二元仿生耦合减阻研究[D]. 吉林: 吉林大学, 2013.
[2] Lang A W, Motta P, Hidalgo P, et al. Bristled Shark Skin: a Microgeometry for Boundary Layer Control[J]. Bioinspiration & Biomimetics, 2008, 3(4): 046005.
[3] Walsh M J, Weinstein L M. Drag and Heat Transfer on Surfaces with Small Longitudinal Fins[C]//11th Fluid and Plasma Dynamics Conference. Seattle U. S. A.: AIAA, 2006.
[4] Bechert D W, Reif W E. On the Drag Reduction of the Shark Skin[C]//23rd Aerospace Sciences Meeting. Reno, U.S.A.: AIAA, 1985.
[5] Zhang D Y, Luo Y H, Xiang L I, et al. Numerical Simulation and Experimental Study of Drag Reducing Surface of a Real Shark Skin[J]. Journal of Hydrodynamics, 2011, 23(2): 204-211.
[6] Iurchenko N F, Babenko V V. Stabilization of Longitudinal Vortices by the Cutaneous Integument of Dolphins[J]. Biofizika, 1980, 25(2): 299-304.
[7] Kramer M O. Boundary Layer Stabilization by Distributed Damping[J]. Naval Engineers Journal, 2010, 72(1): 25-34.
[8] Gray J. Studies in Animal Locomotion[J]. Journal of Experimental Biology, 1933, 15(4): 506-517.
[9] Kramer M O. Boundary Layer Stabilization by Distributed Damping[J]. Naval Engineers Journal, 2010, 72(1): 25-34.
[10] Choi K S, Yang X, Clayton B R, et al. Turbulent Drag Reduction using Compliant Surfaces[J]. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 1997, 453(1965): 2229-2240.
[11] Wu Y T. Swimming of a Waving Plate[J]. Journal of Fluid Mechanics, 1961, 10(3): 321-344.
[12] 王硕, 谭明. 机器鱼[M]. 第1版. 北京: 北京邮电大学出版社, 2006.
[13] Videler J J. Body Surface Adaptations to Boundary-Layer Dynamics[J]. Symposia of the Society for Experimental Biology, 1995, 49: 1-20.
[14] Barrett D S, Triantafyllou M S, Yue D K P, et al. Drag Reduction in Fish-Like Locomotion[J]. Journal of Fluid Mechanics, 1999, 392: 183-212.
[15] 肖华攀, 方子帆, 朱陈, 等. 水下流线型体的结构阻力特性及其应用研究[J]. 三峡大学学报(自然科学版), 2013, 35(6): 92-96.Xiao Hua-pan, Fang Zi-fan, Zhu Chen, et al. Structural Drag Characteristic and Application Research of Underwater Streamlined Body[J]. Journal of China Three Gorges University(Natural Sciences), 2013, 35(6): 92-96.
[16] Wilcox D C. Turbulence Modeling-an Overview[C]//39th Aerospace Sciences Meeting & Exhibit. Reno, U.S.A.: AIAA, 2013.
[17] 陈丽, 段登平. 大气动/静飞行器飞行原理[M]. 上海: 上海交通大学出版社, 2015.
1. 谢景鹏, 李宗刚, 杜亚江, 等. 基于视觉信息丢失的机器鱼运动控制算法[J]. 水下无人系统学报, 2020, 28(5)
2. 朱红秀, 杜闯, 褚彦斌, 等. 一种电磁驱动机器鱼避障方法[J]. 水下无人系统学报, 2019, 27(6).
3. 胡桥, 刘钰, 赵振轶, 等. 水下无人集群仿生人工侧线探测技术研究进展[J]. 水下无人系统学报, 2019, 27(2).
4. 张晗, 王伟, 谢广明. 面向水下机器人的水下电场通信协议设计[J]. 水下无人系统学报, 2019, 27(2).
5. 卞长生, 白万发, 朱子才, 等. 基于IPMC仿生机器鱼驱动技术研究[J]. 水下无人系统学报, 2019, 27(2).
6. 常龙飞, 李超群, 牛清正, 等. IPMC驱动柔性机器鱼速度控制系统[J]. 水下无人系统学报, 2019, 27(2).
7. 刘钰, 胡桥, 赵振轶, 等. 基于EMD与SVM的仿生机器鱼人工侧线智能探测方法[J]. 水下无人系统学报, 2019, 27(2).
8. 王延杰, 郝牧宇, 张霖, 等. 基于智能驱动材料的水下仿生机器人发展综述[J]. 水下无人系统学报, 2019, 27(2).
9. 范增, 王扬威, 刘凯, 等. 仿生机器鱼胸鳍波动与摆动融合推进机制建模及实验研究[J]. 水下无人系统学报, 2019, 27(2).
10. 张守旭, 王宝峰, 严卫生. 基于事件驱动策略的多仿生机器鱼编队控制[J]. 水下无人系统学报, 2017, 25(4).
Flat Drag Reduction Method Based on Biomimetic Fish-body Structure
LI Guang-hao1, FENF Na1,2, LIU Gui-jie1
(1. College of Engineering, Ocean University of China, Qingdao 266100, China; 2. Navigation Department, Shandong Transport Vocational College, Weifang 261206, China)
Ocean environments are complex, wherein the variation in flow velocity is wide and the general drag reduction mode with robots is unstable. In this study, a new drag reduction method is proposed for robots to better adapt to ocean environments. The effect of drag reduction is verified by numerical simulations and experiments. First, based on the principle of bionics, a robot fish operating under a body and/or caudal fin(BCF) mode is selected as the research object, and the model is reconstructed to duplicate the fish body. Second, the effects of model length, height, and thickness on drag reduction are studied by numerical simulation. The law of drag reduction is also summarized, and the mechanism of drag reduction is investigatedintensively. The correctness of the numerical simulation is verified through a fluid experiment. Experimental results show that with an increase in the model length, the effect of drag reduction is gradually worsened. However, the flow velocity that preforms the best drag reduction effect is not affected by the length. The effect of drag reduction is greatly affected by the change in model height. With an increase in model thickness, the range of flow velocity that preforms drag reduction increases. The reconstructed model effectively reduces drag and has a wide range of flow velocity applications, thus enabling better adaptation to ocean environments.
biomimetic fish; drag reduction; hydrodynamic experiment
TB17; O351.2
A
2096-3920(2021)01-0080-08
10.11993/j.issn.2096-3920.2021.01.012
李广浩, 冯娜, 刘贵杰. 基于仿生鱼体结构的平板减阻方法[J]. 水下无人系统学报, 2021, 29(1): 80-87.
2020-02-25;
2020-05-14.
国家自然科学基金(61540010); 山东省自然科学基金(ZR201709240210).
李广浩(1995-), 男, 在读硕士, 主要研究方向为水下设备减阻.
(责任编辑: 许 妍)
