基于专家模糊系统的液压电梯速度控制策略*
2021-01-04王存堂
□ 陈 健 □ 张 兵 □ 王存堂
江苏大学 机械工程学院 江苏镇江 212013
1 研究背景
随着经济、社会的发展,电梯已经成为特殊建筑、高层建筑中难以或缺的竖直交通运输设备。电梯的广泛使用,是人类社会进入工业化的重要标志之一[1-4]。
根据不同的具体驱动方式,可以将电梯分为三种类型:曳引电梯、螺杆电梯、液压电梯。曳引电梯因为运行过程中安静平稳,并且技术较为成熟,所以应用较为广泛。但是,由于对土建要求较高,并且承载能力有限,限制了曳引电梯在电梯市场中占有率的提高。螺杆电梯具有机构布置灵活、运行稳定可靠的优点,但是承载能力有限,并且在运行过程中会产生较大的机械噪声,影响乘客的乘坐舒适性。液压电梯不需要顶置机房,对土建要求较低,不需要对重,井道利用率高,载质量大,安全性高,广泛应用于车库、停车场等重载场合,以及一些受原土建限制需要增设电梯的旧房改造工程中。近年来,国家对老旧小区改造政策倾斜,使国内液压电梯的需求渐增,市场占有率不断提高。
目前,国内外针对液压电梯速度控制策略的研究仍然主要集中于传统闭环比例积分微分控制。文献[5]介绍利用Simulink软件提供的非线性工具箱解决液压电梯系统中具有状态约束的最优控制问题,并通过实时调整比例积分微分控制器中的比例因子与积分因子,使系统的响应速度得到进一步提升。Fateh等[6]设计了一种基于位置误差与速度误差的双输入比例积分型Mamdani模糊控制器,结果表明,这一控制器可以提供良好的速度跟踪性能。赵国军等[7]采用常规比例积分微分与人工智能相结合的方法,设计了一种多模智能比例积分微分控制算法。试验结果显示,这一控制算法的重复精度较高,能较好地抑制随机干扰。应法明[8]采用黑箱建模法得到液压电梯系统的闭环传递函数,并设计了比例积分微分控制器,给出了各控制参数的取值范围。
由于液压电梯具有大惯量、低频响的特点,使常规比例积分微分控制下液压电梯的速度与理想速度之间存在较大的误差,同时影响乘坐的舒适感。笔者基于专家模糊系统,通过比例积分微分控制相关理论,对液压电梯的速度控制策略进行研究,并应用Simulink软件进行仿真分析。
2 液压电梯结构与工作原理
液压电梯是一种典型的机、电、液一体化的产品,其结构如图1所示。
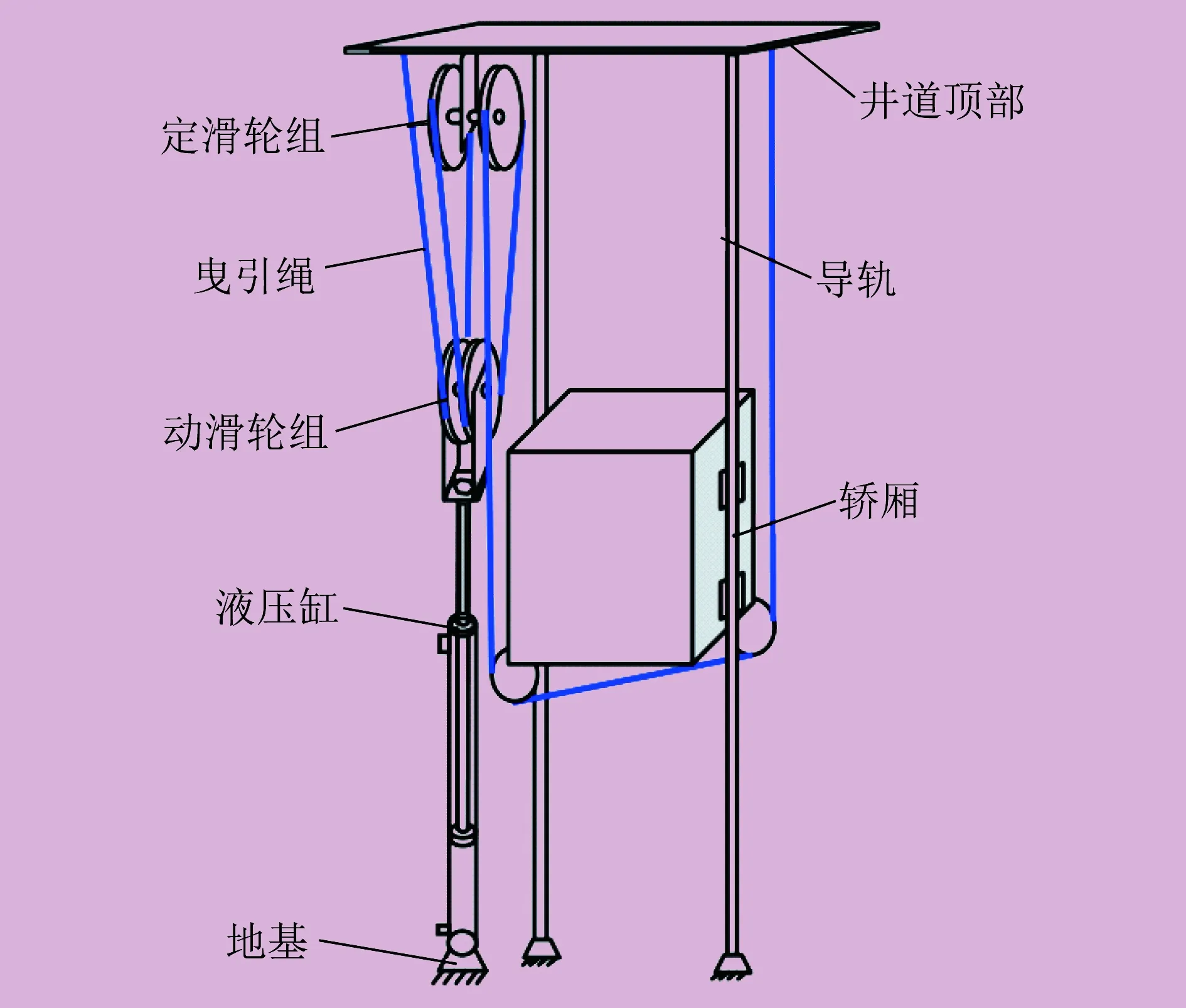
图1 液压电梯结构
液压电梯主要由泵站系统、液压控制系统、液压缸、升降系统、轿厢、电气控制系统等部分组成。泵站系统为液压电梯的运行提供稳定的动力,并可存储油液。液压控制系统控制液压电梯的运行速度。液压缸通过作用于曳引绳间接带动轿厢运动。升降系统主要包括滑轮组和曳引绳,通过不同的缠绕比可以得到不同的液压缸与轿厢速比,笔者采用速比为1 ∶2。电气控制系统主要协调各部件的工作。忽略滑轮的转动惯量及黏性摩擦等非线性因素后,得到简化后液压电梯的工作原理,如图2所示。

图2 简化后液压电梯工作原理
3 传递函数推导
液压电梯速度闭环控制原理框图如图3所示。由图3可以看出,液压电梯主要可以分为变频器-电机、液压、机械提升三个部分。需要说明的是,笔者并未将蓄能器纳入其中,这主要是因为蓄能器只在电梯上行时提供附加力矩,在电梯下行时储存势能,就速度控制而言,蓄能器的作用并未得到直接的体现。
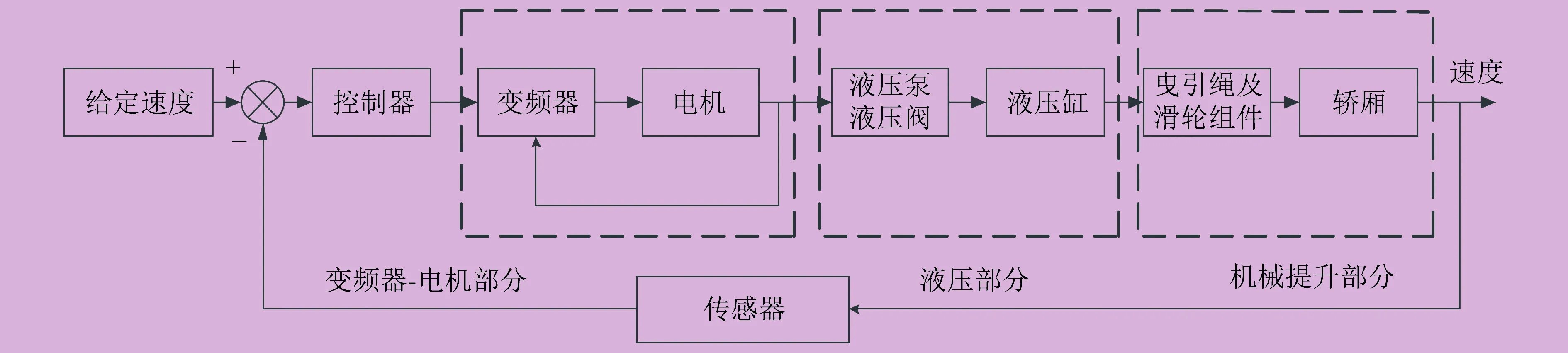
图3 液压电梯速度闭环控制原理框图
通过电机与液压泵轴系上的力平衡关系,可以推导出变频器-电机部分的传递函数为:
(1)
式中:n为转子转速;uc为理想控制电压;k1为电机同步转速与控制电压比例因子;Jm为电机轴上总转动惯量。
曳引绳-轿厢部分的传递函数为:


(2)
式中:vc为液压缸输出转速;Vp为液压泵排量;Ac为液压缸有效面积;Mc为液压缸柱塞质量;c为曳引绳阻尼;mL为轿厢和负载总质量;k为曳引绳刚度;V0为蓄能器预充气体积;Ec为油液体积模量;kcp为液压泵与液压缸总泄漏因子。
轿箱速度与液压缸输出速度的传递函数为:
(3)
式中:vL为轿厢速度。
综合式(1)、式(2)、式(3),可以得到系统的开环传递函数Gk(s)为:
(4)
式中:vi为理想输入速度;k2为控制电压与轿厢理想速度比例因子。
为方便分析求解过程,进行如下定义:
(5)
(6)
(7)
(8)
(9)
式中:ω1为曳引绳-负载谐振频率;ω2为变频器-电机转折频率;ωh为液压系统无阻尼自然频率;ξ1为曳引绳-负载阻尼比;ξh为液压系统阻尼比;L0为液压泵折算至缸内的初始长度;L为液压缸行程。
由此,式(4)可以表示为:
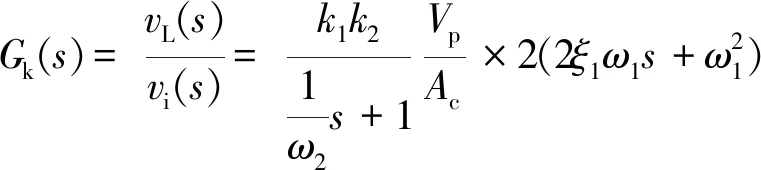
(10)
曳引绳-负载谐振频率ω1、液压系统无阻尼自然频率ωh、曳引绳-负载阻尼比ξ1、液压系统阻尼比ξh与液压缸行程L在轿厢负载总质量1 250 kg、1 750 kg、2 250 kg工况下的关系依次如图4、图5、图6、图7所示。轿厢自身质量为1 250 kg。
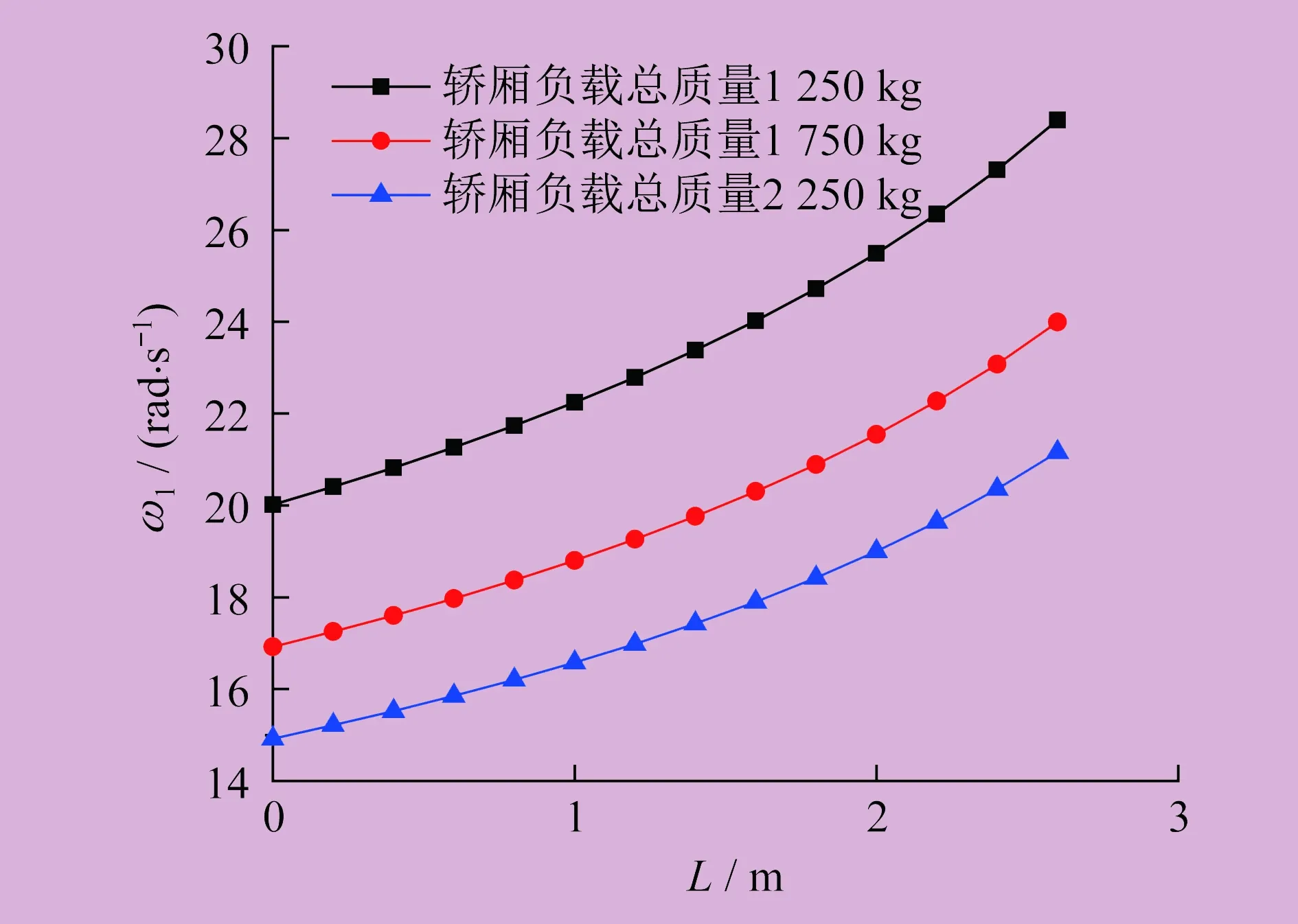
图4 曳引绳-负载谐振频率与液压缸行程关系

图5 液压系统无阻尼自然频率与液压缸行程关系
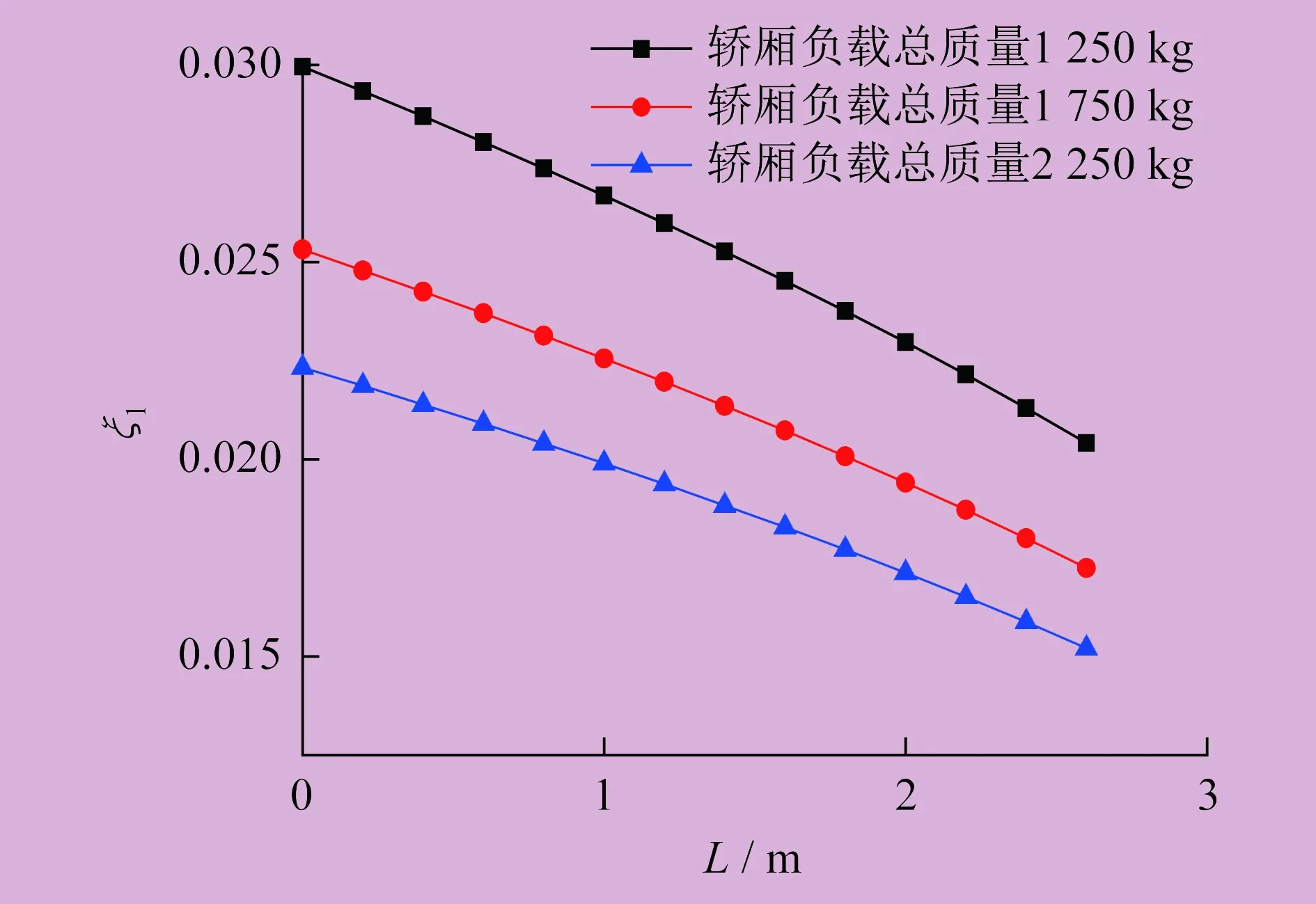
图6 曳引绳-负载阻尼比与液压缸行程关系
由图4与图5可以看出,轿厢负载一定时,曳引绳-负载谐振频率ω1随液压缸行程L的增大而提高,液压系统无阻尼自然频率ωh随液压缸行程L的增大而降低,并且都在轿厢空载时达到最大值。ω1最大值约为20 rad/s,ωh最大值约为18.5 rad/s。由此可见,轿厢空载工况更能说明系统低频特性。由图6与图7可以看出,轿厢负载一定时,曳引绳-负载阻尼比ξ1与液压系统阻尼比ξh都随液压缸行程L的增大而减小。ξ1在轿厢空载时达到最大值,约为0.03。ξh在满载时达到最大值,约为0.025。将轿厢处于空载状态下的参数代入式(10),平衡位置取底层,得到底层系统的传递函数为:

图7 液压系统阻尼比与液压缸行程关系
Gk(s)=vL(s)/vi(s)=(0.945s+248)
/(1.523×10-4s4+1.55×10-2s3
+2.46s2+2.257s+248)
(11)
根据式(11),绘制液压电梯开环伯德图,如图8所示。
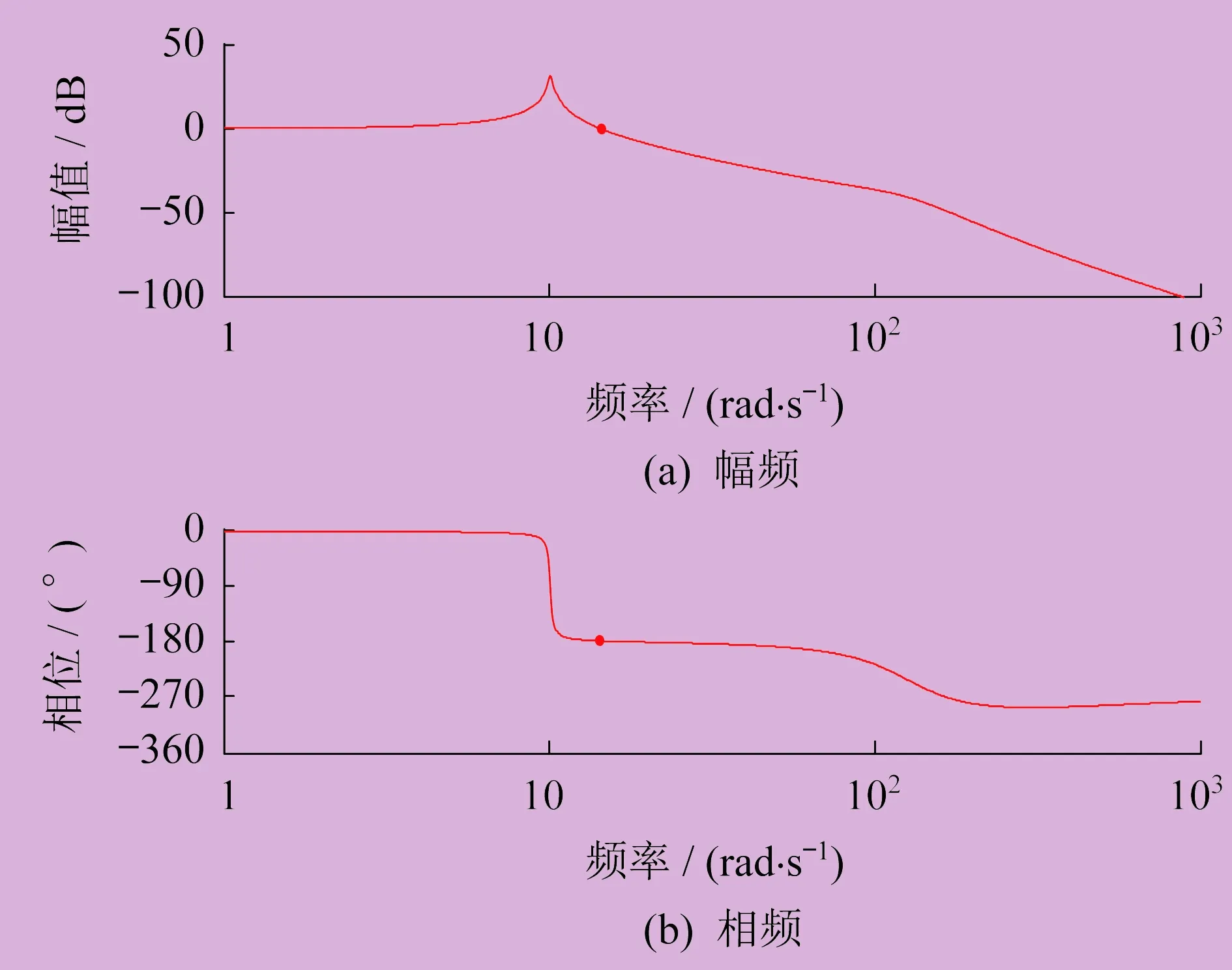
图8 液压电梯开环伯德图
由于液压电梯为四阶零型结构,因此不可避免地会存在稳态误差。由图8可以看出,从相频特性曲线与-180°相位交点纵向延伸至幅频特性曲线,可以得到一个交点,该交点与幅频特性曲线中0 dB坐标线的差值即为幅值稳定裕量,幅值稳定裕量为-1.17 dB。同样,从幅频特性曲线与0 dB幅值交点纵向延伸至相频特性曲线,可以得到一个交点,该交点与相频特性曲线中-180°坐标线的差值即为相位稳定裕量,相位稳定裕量为-1°。由经典控制理论可知,幅值稳定裕量与相位稳定裕量均小于0,这意味该液压电梯闭环状态是不稳定的。
4 控制器设计
常规比例积分微分控制器因简单、可靠、控制参数方便调节等特点,在工业控制领域得到大范围应用。比例积分微分控制器的输出量u(t)为:
(12)
式中:KP为比例因子;KI为积分因子;KD为微分因子;e为输入与实际输出的偏差。
比例因子越大,系统响应越快,但过大的比例因子容易使系统产生超调。积分因子用于消除系统的静差,提高系统的无差度。微分因子可以提高系统的动作速度,缩短调节时间。
针对液压电梯大惯量、低频响的特点,文献[9]指出常规闭环比例积分微分控制不能得到令人满意的效果。对此,笔者设计了一种基于前馈-反馈的比例微分控制器,其结构如图9所示。
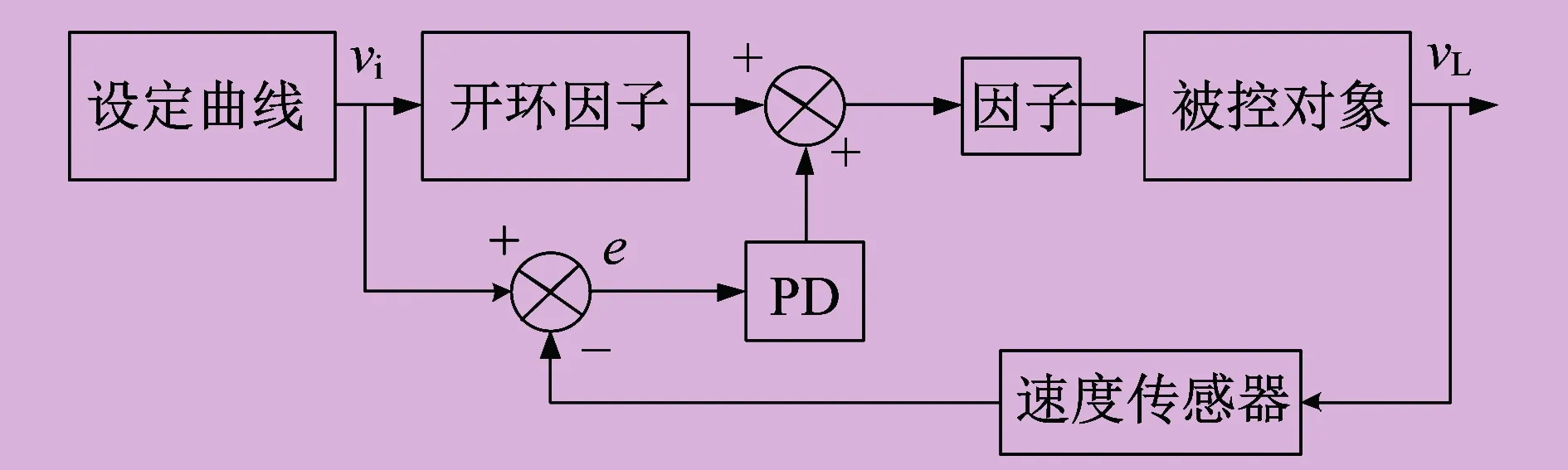
图9 前馈-反馈比例微分控制器结构
需要说明的是,前馈-反馈控制实际上是按输入进行补偿的复合校正策略,相较于积分量的滞后特性,微分量可以预测变化趋势,减小误差,因此笔者没有采用微分控制。
传统比例积分微分控制的参数一经确定,在运行过程中便不能进行修改,因此不具有自适应的特点[10-11]。基于前馈-反馈的专家模糊比例微分控制器原理如图10所示,以速度偏差E及速度偏差的变化率Ec为输入,利用模糊规则与专家经验,通过模糊化、模糊推理、解模糊的过程,实现控制参数比例因子、微分因子的在线调整,并得出最终的控制量。模糊规则中,比例因子、微分因子的调整规则分别见表1、表2。
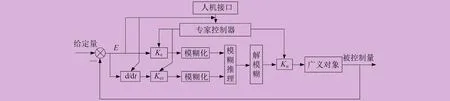
图10 前馈-反馈专家模糊比例微分控制器原理

表1 比例因子调整规则
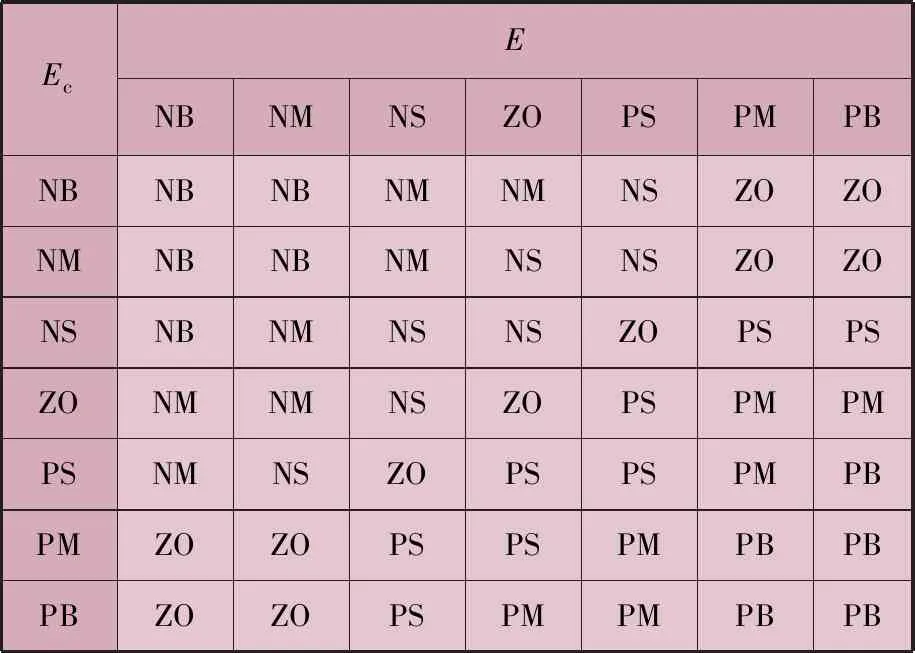
表2 微分因子调整规则
专家模糊控制器根据速度偏差E、速度偏差变化率Ec,实现输入模糊化过程中量化因子Ke、Kec与比例因子Ku的在线调整[12-14],规则如下:
(1) IFE>Epb,THENU=Unb
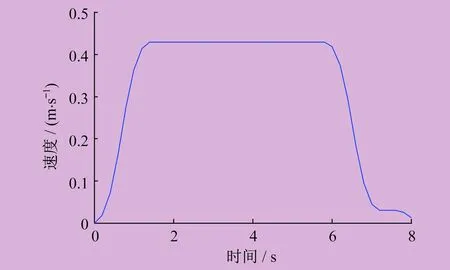
(2) IFE (3) IFEc>Ecpb,THENU=Unb (4) IFEc (5) IFEEc<0 ORE=0,THENU=INT[αE+(1-α)Ec] 规则中,U为实际控制电压,Epb、Ecpb、Upb依次为E、Ec、U的正向最大值,Enb、Ecnb、Unb依次为E、Ec、U的负向最大值,α、β、γ为比例参数,由经验确定,K为取样数量。 专家模糊控制器的规则可以运用Matlab软件中内置的S函数来编写。专家模糊控制仿真模型如图11所示。 图11 专家模糊控制仿真模型 液压电梯的理想速度曲线如图12所示。取比例因子为2.0,微分因子为0.1,利用Simulink软件分别对常规比例微分控制、模糊比例微分控制、专家模糊比例微分控制下的液压电梯运行速差曲线进行仿真分析,如图13所示。 图12 液压电梯理想速度曲线 图13 液压电梯运行速差曲线 通过对常规比例微分控制、模糊比例微分控制、专家模糊比例微分控制下的液压电梯运行速差曲线进行分析,可以得出常规比例微分控制下液压电梯运行速差在±5 mm/s以内,模糊比例微分控制下液压电梯运行速差在±2.5 mm/s以内,专家模糊比例微分控制下液压电梯运行速差在±2 mm/s以内。仿真结果验证了专家模糊比例微分控制策略的可行性与有效性。 笔者通过对液压电梯各主要环节进行数学建模,推导出系统的开环传递函数。针对液压电梯大惯量、低频响的特点,基于专家模糊系统,结合比例积分微分控制理论,设计了一种前馈-反馈专家模糊比例微分控制器。 仿真结果表明,专家模糊比例微分控制下的液压电梯运行速差更小,运行精度更高,乘坐的舒适性更高。

5 仿真分析

6 结束语
