救援移动机器人爬梯构型分析*
2021-01-04张洪赫刘玉梅卜春光范晓亮
□ 张洪赫 □ 刘玉梅 □ 卜春光 □ 范晓亮 □ 眭 晋
1.沈阳理工大学 机械工程学院 沈阳 110158 2.中国科学院沈阳自动化研究所 沈阳 110016
1 分析背景
由于城市的独特环境和一些突发事件的特殊性,导致某些社会救援活动只能由机器人来完成。救援移动机器人具有可移动、自动导航、多传感器控制、网络交互、行为控制执行、决策规划等多种功能,是一个综合系统[1],如何在楼宇环境中使用救援机器人,成为近年来的研究热点。楼梯是楼宇环境中最常见的障碍,救援移动机器人在工作中经常需要攀爬楼梯,爬梯成为救援移动机器人适应结构化环境所必备的功能之一[2]。现存相关文献大部分是关于救援移动机器人爬梯机械结构与爬梯过程稳定性的研究,笔者重点分析前摆腿履带式救援移动机器人的爬梯机理,以及救援移动机器人在上下楼梯时的步态,并通过试验验证分析结果的正确性。
2 救援移动机器人结构
救援移动机器人结构如图1所示,主要包括车体、机械腰腹,以及位于车身两侧且对称分布的左右摆腿。采用以上结构由电机驱使左右摆腿运动,改变救援移动机器人的运动姿态,从而使救援移动机器人实现越障运动。机械腰腹位于车体上,可以加载机械手等其它机械结构,使救援移动机器人能够应用于各种不同环境与场合。通过机械腰腹的前后俯仰,可以改变救援移动机器人的质心位置,履腿复合结构则具有较强的受力能力。总体而言,救援移动机器人结构简单清晰,易于控制,变形灵活[3]。

图1 救援移动机器人结构
3 爬梯构型
救援移动机器人在楼宇环境中需要具有一定的越障功能,包括翻越台阶、在楼梯面行走、回归地面等。为实现以上越障功能,设计了救援移动机器人的特定构型[4-5]。
重点分析翻越台阶。救援移动机器人翻越台阶脱离地面构型如图2所示,L1为关节摆腿履带的有效接地长度,H为台阶高度,实现翻越台阶的几何条件为L1>H。

图2 救援移动机器人脱离地面构型
几何条件可以描述为只要关节摆腿履带的有效接地长度大于台阶高度,就可以有一个合适的角度使关节摆腿搭到台阶面,从而为将救援移动机器人抬离地面做好准备。
救援移动机器人翻越台阶脱离地面力学条件如图3所示。将机器人的力学模型简化为三根相铰接的杆件AB、BC、DE,AB杆件为摆腿,BC杆件为车体,DE杆件为机械腰腹,B、E两点为转动关节。笔者对救援移动机器人机械腰腹进行部分简化,使其与救援移动机器人主体融为一体,即杆件BCD为救援移动机器人主体,通过机械腰腹的前后俯仰,改变杆件的关节转角,进而改变救援移动机器人的质心位置,更好地进行爬梯[6]。图3中,机械腰腹质心位置为p3,自重为G3,通过机械腰腹的摆动,改变机器人主体的质心位置p1。

图3 救援移动机器人脱离地面力学条件
救援移动机器人车体脱离地面的瞬间,可描述为AB杆件绕A点转动与BC杆件绕动B点转动相结合的过程。将救援移动机器人整体作为研究对象,N1为地面对救援移动机器人的支撑力,N2为台阶面对关节摆腿的支撑力,G1为车体自重,G2为关节摆腿自重,a1为车体质心加速度,a2为关节摆腿质心加速度,F1与M1分别为车体惯性力向质心简化后的惯性力主矢和主矩,F2与M2分别为关节摆腿惯性力向转动中心简化后的惯性力主矢和主矩,f1与f2为地面对救援移动机器人的摩擦力,根据达朗贝尔原理[7],实现爬梯第一步的力学条件为:
∑Mc(F)=0
N2L3+f2L5+M2-F2L3-G2L2-F1L4
-G1L6-M1=0
由以上分析可以得出,实现救援移动机器人翻越台阶与台阶的高度、关节摆腿的长度和质心位置、车体的长度和质心位置、驱动轮的半径和质量、关节摆腿的驱动力矩、接触面的性质有关。关节摆腿的驱动力矩越大,接触面越粗糙,救援移动机器人就越容易实现爬梯第一步。在救援移动机器人质量不变的条件下,车体加长,整体质心位置向C点靠近,履带驱动轮半径增大,都有利于爬梯第一步的实现。其中,救援移动机器人整体质心向C点靠近可以依靠机械腰腹向后摆动实现。当然,关节摆腿的长度变化对翻越台阶的影响最为复杂,在其它因素都不变的情况下,设关节摆腿的驱动力矩为M,则近似有:
(1)
α=arcsin[(H-R)/L1]
(2)
由式(1)、式(2)可知,必然会有一个合适的关节摆腿长度L1,使N2L3最大,进而使救援移动机器人更容易翻越台阶。救援移动机器人翻越台阶脱离地面是成功爬梯的基础,救援移动机器人翻越台阶的关键点为整体质心越过台阶面。救援移动机器人翻越台阶脱离地面过程极限状态如图4所示,以车体后轮的轴心O为原点,救援移动机器人质心在笛卡尔坐标系下的坐标为(X0,Y0),后轮半径为R,救援移动机器人与地面的夹角为θ,则救援移动机器人质心越过台阶面的几何条件可近似表达为:
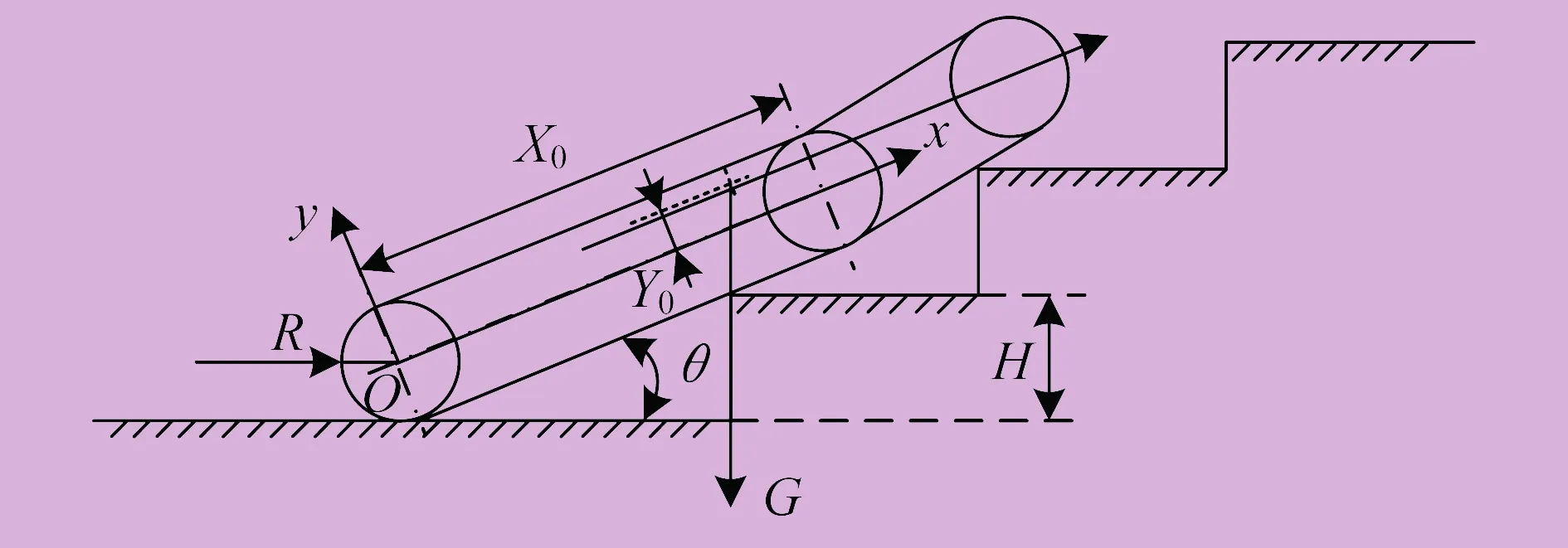
图4 救援移动机器人脱离地面极限状态
X0-(R+Y0)tanθ>H/sinθ
(3)
救援移动机器人翻越台阶脱离地面极限状态力学条件如图5所示。将救援移动机器人质心越过台阶面的瞬间看作绕Q点的转动,f3为台阶面对救援移动机器人的牵引力,f4为地面对救援移动机器人的牵引力,J为救援移动机器人绕Q点的转动惯量,ω为救援移动机器人绕Q点的瞬间转动角速度,则力学条件可以表达为:
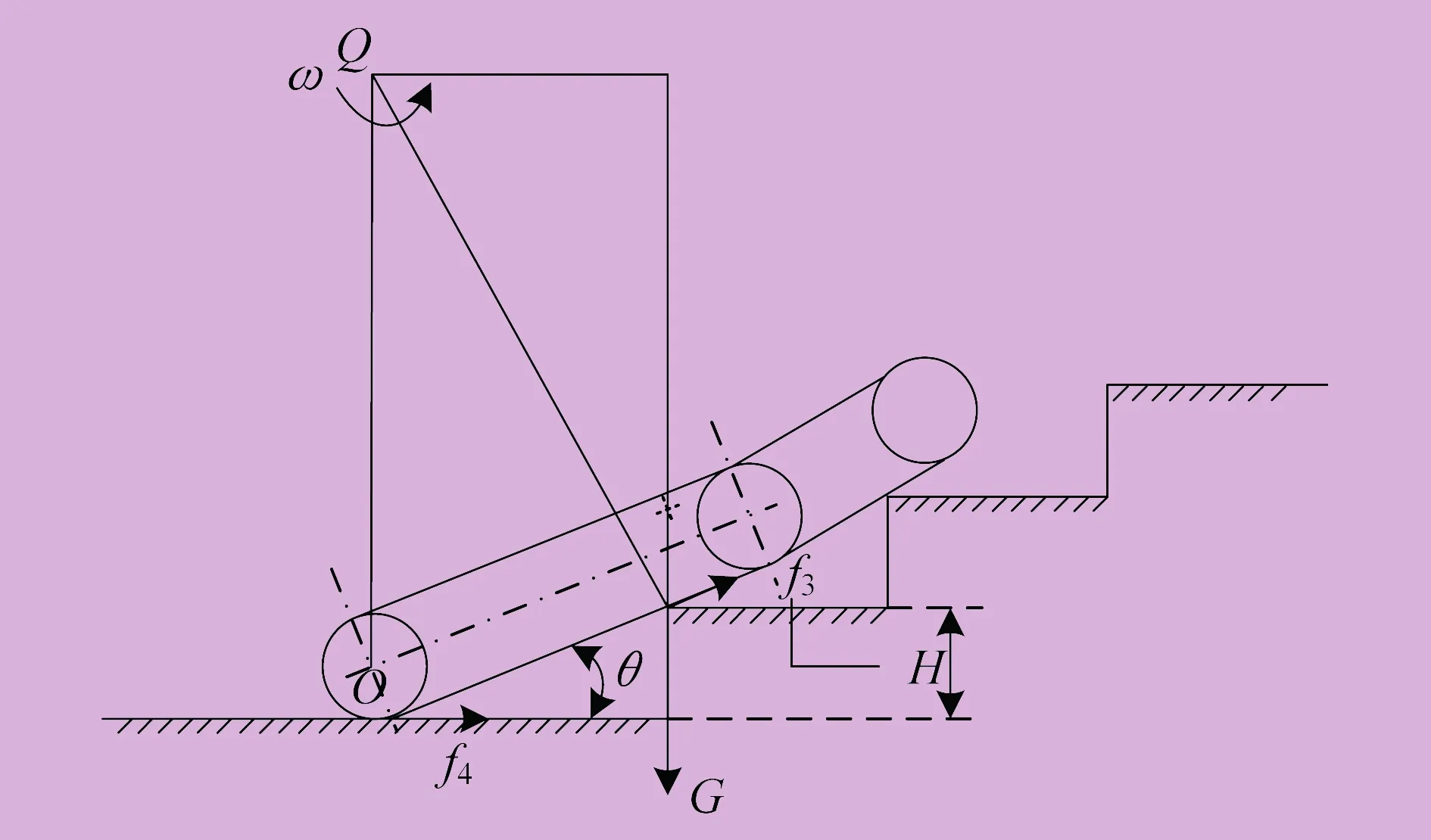
图5 救援移动机器人脱离地面极限状态力学条件
[f3H/(sinθtanθ)+f4H/sin2θ
-GH/sinθ]Δt=Jω
(4)
几何条件给出了救援移动机器人质心越过台阶面所需要的角度θ,力学条件给出了救援移动机器人自身抬高到角度θ所需要的驱动力。由式(3)、式(4)可以得出,救援移动机器人的质心位置与履带轮的半径是影响救援移动机器人能否翻越台阶的主要因素,减小履带轮半径,降低与前移救援移动机器人质心,都有利于救援移动机器人翻越台阶[8]。其中,救援移动机器人质心位置改变可以通过机械腰腹俯仰运动实现,履带轮半径在设计之初就需要考虑。
救援移动机器人长度如图6所示。救援移动机器人实现在楼梯面上行走,主要与长度有关。

图6 救援移动机器人长度
L7为车体有效接地长度,T为台阶楼梯宽度,只有满足式(5),救援移动机器人才可以实现连续爬梯。其中,车体有效接地长度近似等于履带有效接地长度。
(5)
通过以上分析得到前摆腿履带式救援移动机器人可连续爬梯的必要条件,救援移动机器人质心位置、履带轮半径、摆腿与车体长度都会影响救援移动机器人的爬梯性能。这些影响因素不具有单调性,因此要提高救援移动机器人的爬梯性能,可以在考虑客观条件的前提下,以上述影响因素为依据,对救援移动机器人的爬梯姿态进行优化。
4 爬梯步骤
对救援移动机器人爬梯姿态进行优化之后,在爬梯过程中,由于重力的作用,会造成救援移动机器人与楼梯台阶面撞击。这种撞击产生的振动不仅会造成救援移动机器人损坏,而且会大大降低救援移动机器人在爬梯时的稳定性。为了尽量减小撞击产生的振动,规划了如图7所示救援移动机器人爬梯步骤[9]。

图7 救援移动机器人爬梯步骤
救援移动机器人爬梯步骤共有八步。从救援移动机器人接触台阶开始,第一步,将摆腿向上抬起,选择一个适合的角度将摆腿搭在台阶面上。第二步,摆腿向下运动,直至摆腿下的履带与主体下的履带平行,机械腰腹向前摆动,控制救援移动机器人质心位置向前。第三步,机械腰腹摆动,保证救援移动机器人质心稳定,救援移动机器人开始爬梯,在台阶面上行走。第四步,救援移动机器人摆腿到最后一阶台阶。第五步,救援移动机器人继续行走,履带轮到达最后一阶台阶。第六步,摆腿向下运动,直至摆腿接触地面。第七步,救援移动机器人继续行走,主体后履带到达最后一阶台阶回归地面,机械腰腹向后摆动,保证救援移动机器人质心位置向后偏移,方便救援移动机器人回归水平行走姿态。第八步,摆腿向上运动,机械腰腹向后摆动,救援移动机器人姿态恢复为水平地面行走[10]。
5 仿真验证
为验证上述分析的正确性,进行了救援移动机器人的仿真验证。
仿真试验使用虚拟样机分析软件RecurDyn对救援移动机器人进行建模,并通过搭建仿真楼梯进行试验。
RecurDyn软件搭载了许多使用模组,使用系统工具包Track建立救援移动机器人虚拟样机,使用Ground模组搭建楼梯地形。
救援移动机器人爬梯仿真的过程和试验结果如图8所示。
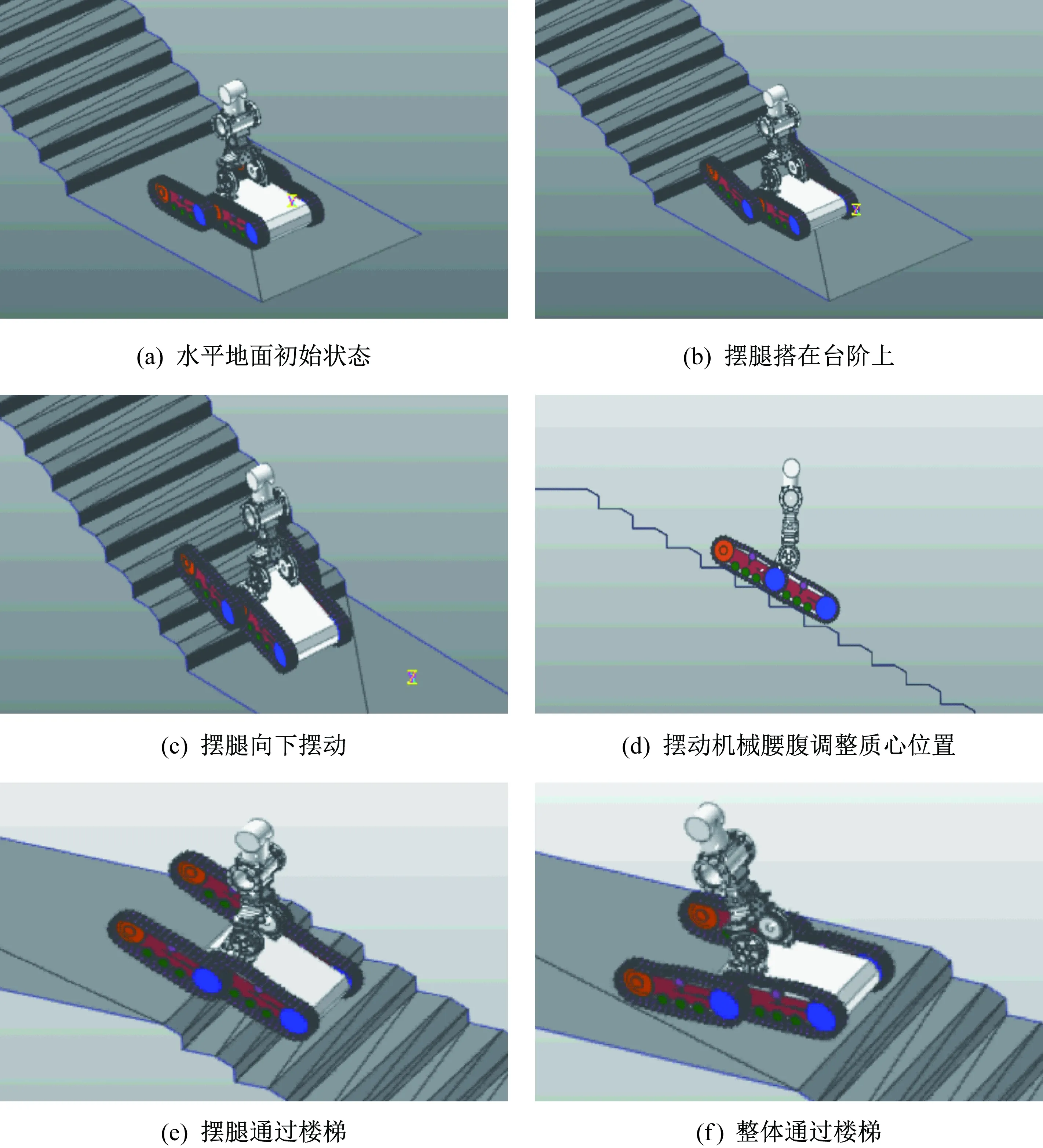
图8 救援移动机器人爬梯仿真试验
所采用的爬梯步骤有效减小了撞击产生的振动,提高了救援移动机器人爬梯的稳定性,同时也验证了所分析的爬梯条件的正确性。
6 结束语
笔者对前摆腿履带式救援移动机器人进行了爬梯构型分析,提出了连续爬梯的必要条件,并通过仿真试验进行了验证。所做分析为在救援移动机器人设计初始阶段如何确定关键尺寸、计算所需驱动力、进行爬梯姿态调整提供了借鉴。通过机械腰腹与摆腿的运动,改变救援移动机器人的姿态,实现了攀爬楼梯。
当然,要使救援移动机器人真正满足使用要求,还需要对其步态和能耗进行优化,使其性能真正达到最优。
