基于图像传感器的智能小车的系统设计与实现
2020-08-17陈小龙
陈小龙
(重庆工商职业学院 重庆 401520)
本设计是以UP-InnoSTAR创意之星机器人套件为车架,MultiFLEX2-PXA270控制器为控制核心,采用数字摄像头OV7620为图像采样模块。通过获取竞赛赛道中线的图像信息,将采集出来的数据通过算法处理,识别当前道路状况(弯道或者跑出轨道之外),从而算出智能小车与黑线之间位置偏差,然后采用PID算法方式实现对舵机转向的控制,以实现速度的闭环控制。不仅如此,智能小车还将通过相关算法分析预判前方道路环境,并根据不同路况为智能小车分配不同的行驶速度,以保证智能小车的最佳通过性与安全性。
一、总体架构
(一)设计思路与工作原理
图像传感器是一种模拟传感器,利用光电器件的光电转换功能将感光面上的光像转换为与光像成相应比例关系的电信号,是一种将光学图像转换成电子信号的设备。本文的设计原理主要通过添加图像传感器,使智能小车能够通过摄像头拍照获取当前图片的最新信息,通过算法对图片中的中线(黑线)进行提取、舵机转向控制、速度控制从而感知预设轨道路线,并能在无感知的时间内作出迅速判断和相应的执行动作,从而实现在沿大赛预设路线行进的功能,完成规定的赛道任务。
(二)主流程图
小车进入循线模式后,即开始不停地返回轨迹与边缘线的灰度值,一旦检测到某个灰度值超出预设值范围,就执行相应的判断程序,把相应的信号发送给控制器,从而纠正小车的状态。程序的主流程图如图1,系统算法处理流程图如图2所示。
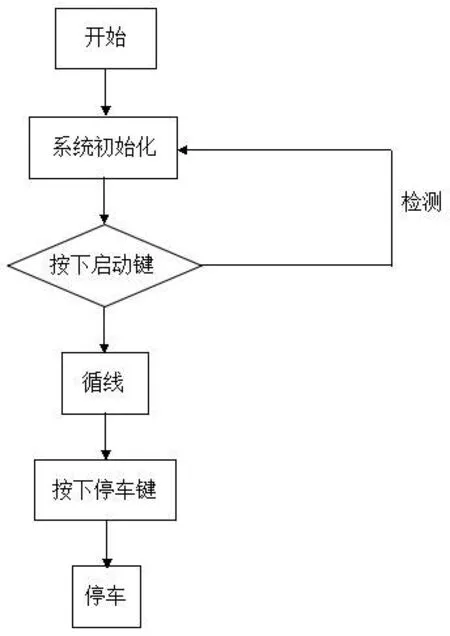
图1 主流程图
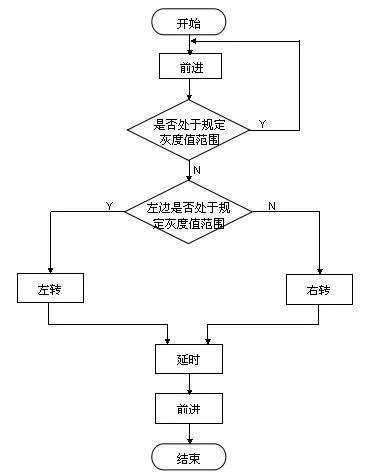
图2 系统算法处理流程图
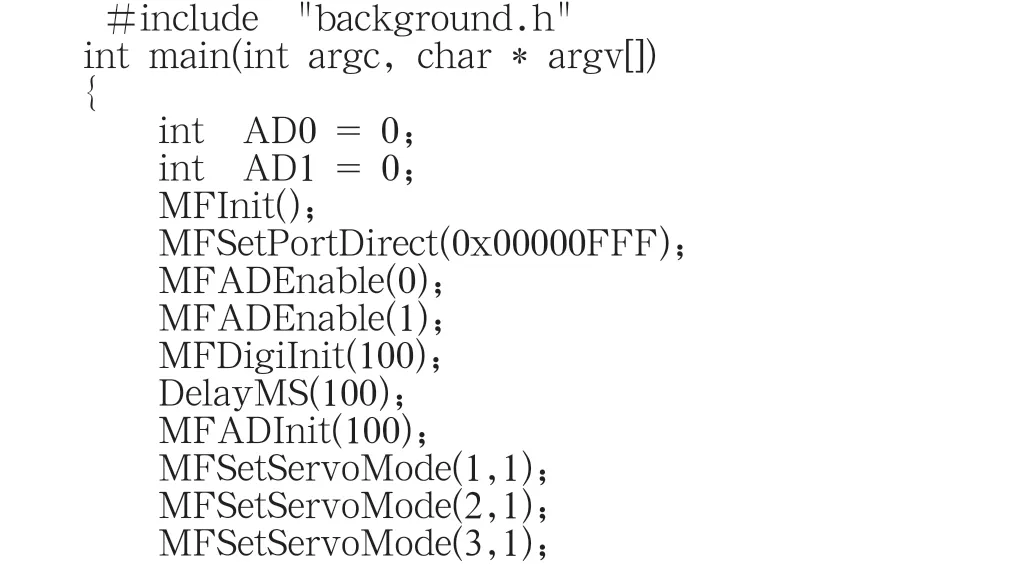
(三)程序设计
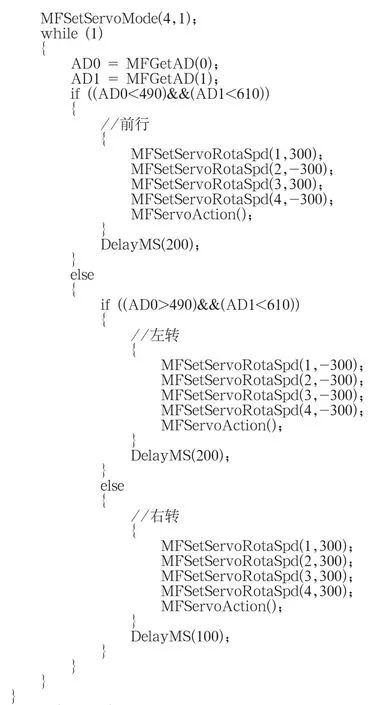
程序设计主要功能是检测当前图像的最新轨迹信息,是否有超出预定的轨道。当图像传感器通过图像处理感知到小车偏离轨迹时,若轨迹超出一定的阈值,则调整舵机转向进行方向的重新定位,舵机的左轮进行左向偏转,否则进行右向偏转。以下是舵机发生偏转后驱动偏转后的部分代码,代码如下:
二、运行及测试
程序代码编写完成之后,利用网线连接上位机与MultiFLEXTM2-PXA270控制器,通过FTP将可执行程序下载到控制器中,用户计算机将控制控制器,复位后开始运行。
从运行情况来看,本系统能实现以下功能:在行驶过程中,小车能够自动检测预先设好的轨迹,实现沿预设轨迹的前进。若有偏离,能够自动纠正,返回到预设轨迹上。
同时,在运行过程中发现,智能小车循线的效果有时不是很好。这可能是由以下原因引起的:
图像传感器的工作原理,是利用光电器件的光电转换功能将感光面上的光像转换为与光像成相应比例关系的电信号。在固定摄像头时有一定的偏差造成的。
外界光线的强弱对检测效果的影响非常大,在实验检测过程中要注意避免外界光的干扰。
检测面的材质不同也会引起其返回值的差异。
三、结束语
智能小车是移动机器人的一个重要发展方向,目前还处于实验阶段,它在多种行为冲突问题的解决上尚存缺陷。例如:基于图像传感器的智能小车识别精度高,但易受环境光线影响,识别速度慢,运行不稳定;基于红外接近传感器的智能小车不能完成对障碍物的全面信息采集,不能保证避障路径最短,效率不高。因此,该设计在以后的学习研究中还有待改进。
