深度学习在雷达目标高分辨距离像识别中的研究综述
2020-07-16付哲泉李相平李尚生但波王旭坤
付哲泉 李相平 李尚生 但波 王旭坤
摘 要:雷达目标的高分辨距离像包含了丰富的目标信息,基于高分辨距离像的雷达目标识别一直是军事领域关注的重点和难点。随着深度学习逐渐成为各领域的研究热点,基于深度学习算法的高分辨距离像目标识别得到了广泛关注。与传统方法相比,深度学习算法可以自动提取目标高分辨距离像数据有效的深层特征,达到更高的识别准确率。本文总结了近期深度学习在雷达目标高分辨距离像识别领域的应用和研究情况,介绍了该领域四个亟待解决的问题。
关键词: 雷达;深度学习;高分辨距离像;目标识别; 人工智能
中图分类号:TJ760;TP18文献标识码:A 文章编号: 1673-5048(2020)03-0037-07
0 引言
雷达对目标的识别一直是军事领域关注的重点,目标的高分辨距离像(High Resolution Range Profile,HRRP)表示目标散射中心在雷达-目标方向上的投影,包含了丰富的目标结构特征。由于易获取、易存储和易处理的特点,HRRP一直作为军事目标识别的重要数据来源。
随着宽带雷达的应用,雷达目标已经由点目标变为体目标,可以通过提取HRRP的强散射点分布特征对不同目标进行分类和识别。前期基于HRRP的雷达目标识别方法可以总结为5类: (1)基于统计模型的识别。统计模型方法以贝叶斯理论为基础,从训练样本中获取模型参数,再根据测试样本所对应的各类后验概率判定其类别。常见的统计模型有自适应高斯分类器模型[1]、伽玛混合模型[2]等。(2)基于流行学习的识别。其思想是根据某一准则将高维HRRP向低维特征空间投影,并利用投影系数作为特征向量进行识别,该方法可以有效降低HRRP特征维数。主要有主成分分析[3]、线性判别分析[4]等。(3)基于核方法的识别。核方法是基于Mercer核展开定理,通过非线性映射,把样本映射到Hilbert空间,从而将非线性可分的HRRP样本转变为线性可分的HRRP样本,再利用线性方法解决分类问题,通常与其他的特征提取方法结合[5]。(4)基于字典学习的识别。该类方法通过特定的观测矩阵求得HRRP的稀疏系数,将该系数作为目标特征进行分类识别。该类方法的关键在于字典的构造,如稳健字典学习[6]、重构判别字典学习[7]等。(5)基于HRRP序列的识别。相邻姿态角的HRRP序列在时间和空间上有较强的连
续性,基于隐马尔科夫模型[8]、多模态平稳序列建模[9]、受限玻尔兹曼机[10]等方法,利用这种连续性可以有效提高雷达目标的识别性能。
近年来,深度学习成为各领域的研究热点,在合成孔径雷达、逆合成孔径雷达图像[11-13]和光学、遥感、红外等图像[14-17]的目标检测、识别与分类方面都得到了广泛应用。雷达基于HRRP信息的目标分类识别亦可通过深度学习算法来实现。相比于传统的识别方法,深度学习算法可以自动提取目标HRRP数据有效的深层特征,以进行不同目标的分类与识别。
1 基于CNN的HRRP目标识别
1.1 CNN基本原理
卷积神经网络(Convolutional Neural Networks,CNN)
是一种包含卷积计算的前馈神经网络,对其研究可以追溯到20世纪60年代Hubel和Wiesel在研究猫脑皮层中用于局部敏感的方向选择的神经元时提出的一种网络结构。由于CNN在计算过程中具有平移不变性等特点,因此,可以避免对HRRP数据复杂的预处理,有利于深度学习算法的HRRP目标识别。经典的CNN网络由卷积层、池化层、全连接层和分类器层组成。针对HRRP的CNN基本框架结构如图1所示。
图1展示了CNN对一个数据长度为128的HRRP进行10种目标的分类过程,网络结构依次为卷积层、池化层、卷积层、池化层、全连接层和分类器层。
卷积层的主要作用是对输入数据的特征进行提取,卷积层内部可以包含多个卷积核。图1中的两个卷积层分别包含16个和32个卷积核,卷积核的每个元素都对应着权重系数和偏差值。卷积核对输入数据进行卷积计算并加入偏差值,然后利用激活函数进行激活,得到的卷积层输出即为从输入数据提取的特征。计算过程可以表示为
xlj=f∑i∈Mjxl-1i*klij+blj(1)
式中: x表示特征项;M表示输入特征项的集合;k为卷积核;b为偏差值;l是网络结构的层序号;i是卷积核序号;j是特征项通道序号;f是激活函数。卷积层的参数包括卷积核大小、步长、填充和激活函数,常用的激活函数有Sigmoid函数、Tanh函数、Relu函数等,不同的参数组合赋予卷积层不同的特性。
池化层的主要作用是对卷积层提取的特征进行选择和过滤,通过下采样实现对特征的选择和数据降维。常用的池化层有最大池化、均值池化以及混合池化等。
全连接层通常放在卷积神经网络的后部,位于分类器层之前,主要作用是将上一层得到的特征按顺序进行排列得到一维向量,此时特征将失去多维结构。全连接层的输出作为分类器层的输入,通过分类器层的处理后得到整个CNN的输出。常用的分类器有softmax和支持向量机(Support Vector Machine,SVM)等。在目標识别问题中,CNN的输出可以是目标的类别、大小和中心坐标等。
针对监督学习的CNN学习过程一般通过反向传播(Back Propagation,BP)框架进行CNN参数的迭代更新,通过使代价函数计算的误差值最小来获得稳定的识别结果,此时网络训练结束。一种典型的代价函数公式为
EN=12∑Nn=1∑ck=1tnk-ynk2(2)
式中: tnk表示第n个样本对应标签的第k维;ynk表示网络输出的第n个样本的第k维;N表示训练样本的个数;c表示待识别的标签数,对应图1中的10个目标类别。
1.2 基于CNN的HRRP目标识别研究
基于深度学习的HRRP目标识别研究暂时没有典型的公开数据库,不同团队和研究人员针对HRRP目标识别的数据库大多来源于团队自己进行的模型仿真计算和暗室测量。但是不同文献研究均表明,基于深度学习的HRRP目标识别准确率均高于传统的分类方法。
Karabayir O等人[18]利用经典的CNN模型对舰船目标进行分类。首先建立了6艘军舰和4艘民用舰船的模型,然后利用物理光学法计算得到不同舰船在X波段的HRRP数据,即每个舰船目标在方位角[-45°,+45°],俯仰角[+81°,+90°]范围内间隔1°,共910个HRRP数据,并对HRRP数据进行归一化处理,使HRRP的幅度保持在[0,1]区间。每个目标随机选择582个HRRP作为训练集,100个作为验证集,剩余的228个作为测试集。文献中CNN模型包括4个卷积层、2个最大池化层、1个Relu激活层和1个全连接层。最终对自建HRRP数据集的平均识别准确率为93.90%,不同舰船目标的识别准确率为84.56%~97.06%。
山东大学的殷和义等人[19]也使用CNN进行目标分类。他们的数据集来源于微波暗室中对4种飞机缩比模型的实际测量。文章分析了不同激活函数对网络性能的影响,以及不同卷积核大小、不同学习率、不同权值衰减系数对识别率的影响。与BP神经网络、SVM分类器和KNN分类器相比,CNN分类法识别率更高,但耗时更长。
Aalto University的Lundén J和Koivunen V [20]利用CNN模型對多基地雷达HRRP的目标进行分类,其数据集来源于对多个飞机模型的仿真计算,并对HRRP添加白噪声进行了数据集的扩充。利用不同角度的HRRP数据模拟不同基地雷达的回波信号,将CNN对不同雷达(单基地和多基地)HRRP的识别结果进行融合,将输出的最高目标概率与所设阈值进行比较,以判断目标是已知还是未知目标类型。实验结果表明,该方法在低信噪比情况下有较好的识别结果。
南京理工大学的盖晴晴等人[21]提出了一种将HRRP与极化信息相结合的算法。对建模得到的3种简单目标模型利用FEKO软件计算得到全极化数据,根据极化矩阵、Pauli分解和Freeman分解,分别得到6个、3个、3个特征向量,将计算得到的12个特征向量作为CNN模型的输入,对目标进行识别分类。基于全极化矩阵HRRP数据得到的目标识别准确率与不同单一极化数据相比,提高了5%~9%。文献同时对以极化特征向量的不同组合方式作为数据集时的目标分类结果进行了仿真分析。Robert Bosch GmbH的Visentin T等人[22]也利用HRRP的极化信息进行了目标的分类实验,其数据集来源于微波暗室中用77 GHz电磁波对目标模型进行的全极化测量。
南京电子技术研究所的杨予昊等人[23]建立两种CNN结构进行HRRP的目标识别。结构1将HRRP数据变换为二维数据后作为网络的输入,结构2则直接将原始HRRP数据作为网络的输入。采用某型雷达对6种飞机的实测HRRP数据验证该方法的有效性。实验结果表明,与传统的模板匹配法相比,目标识别的准确率提高了20%。与结构1相比,结构2的识别准确率更高,说明将一维HRRP数据转换为二维格式会破坏HRRP的内部结构信息,不利于有效特征的提取。
南京理工大学的王容川等人[24]对CNN模型进行HRRP目标识别时的姿态敏感性进行分析。文献数据集由5类目标在小视角迎头和小视角尾追情况下的HRRP数据组成,即只选取一定观测角度范围的HRRP作为仿真数据。实验结果表明,数据信噪比越高,目标种类越少,识别准确率越高。与融合主成分分析和支持向量机的算法相比,CNN识别准确率更高,并且数据集角度范围越大,识别效果的差别越大,说明CNN相比于传统方法对姿态敏感性的适应能力更强,具有更好的泛化能力。
各研究团队依据所获取的数据集对基于CNN的HRRP目标识别做了很多研究工作,但是侧重点不尽相同,包括分析不同CNN结构和激活函数、学习率等超参数对目标识别准确率的影响,分析HRRP在不同信噪比或不同角度范围条件下的识别准确率,分析多传感器HRRP数据识别结果融合对准确率的提高,分析全极化HRRP数据对识别结果的影响等。与
支持向量机、多层感知机、K最近邻、主成分分析法等传统方法相比,基于CNN的HRRP目标识别均具有更高的识别准确率。
2 基于AE的HRRP目标识别
2.1 AE基本原理
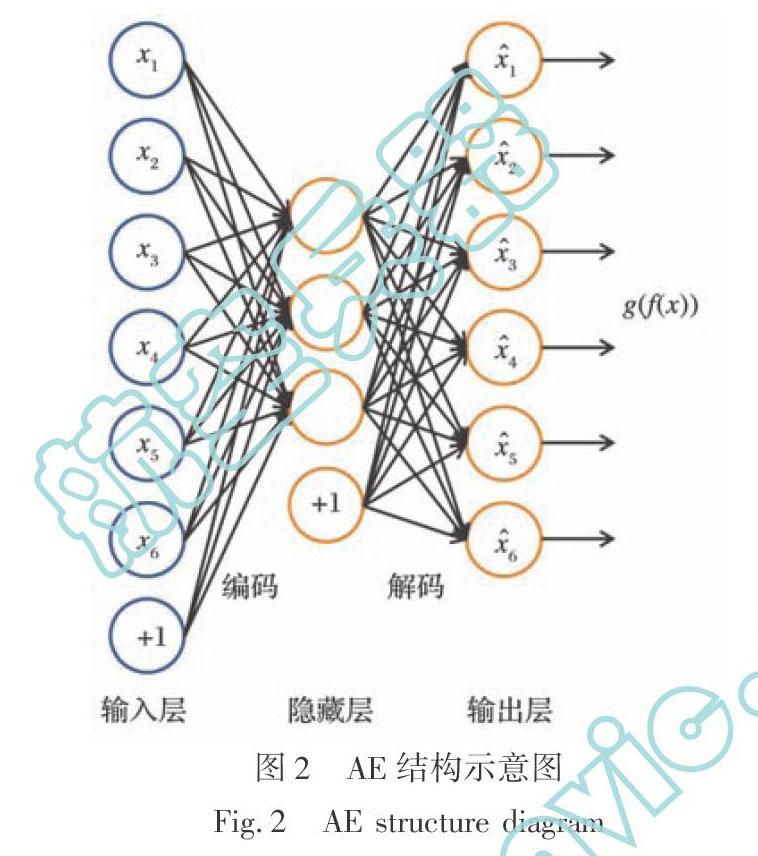
自动编码器(Autoencoder,AE)是一种数据压缩的算法,通过提取输入数据的重要特征来尽可能复现输入信号,进而实现数据压缩。 AE包括编码和解码两个过程,即包括一个由函数h=f(x)表示的编码器和一个由函数r=g(h)表示的解码器。但是AE不能简单设置为g(f(x))=x,需要加入一些约束项来增加提取特征的泛化性和鲁棒性。AE的结构示意图如图2所示。
对AE的改进可以得到不同的自动编码器网络结构。例如: 在AE的基础上增加L1的正则化限制可以得到稀疏自动编码器(Sparse Autoencoder,S1AE),L1的作用是约束隐藏层的节点大部分为零,使隐藏层的特征变得稀疏,减小计算量。对AE的输入层引入随机噪声可以得到去噪自动编码器(Denoise Autoencoder,D1AE),D1AE从加入噪声的输入数据中重构出原始数据,可以使隐藏层提取特征的鲁棒性更好。相对于原始的AE,增加隐藏层的层数可以得到深层自动编码器(Deep Autoencoder,D2AE)。 随着隐藏层数的增加,AE的学习能力得到提升,便于提取更深层的特征。将AE的编码器部分由卷积层和最大池化层替代,解码器部分由卷积层和上采样层替代,AE则变为卷积自动编码器(Convolutional Autoencoder,C1AE),C1AE网络可以从图像数据中更好地提取特征。对D2AE的编码器层进行逐层训练可以得到栈式自动编码器(Stacked Autoencoder,S2AE)。通过对以上改进模型的组合可以得到更多的网络结构。
2.2 基于不同AE的HRRP目标识别研究
文献[25]将稀疏自动编码器和卷积自动编码器融合,利用稀疏卷积自编码器(Sparse Convolutional Autoencoder,S1C1AE)网络对三种车辆模型在微波波段下的半空间和全空间HRRP数据进行分类识别,数据集来源于电磁计算软件的仿真计算。模型的目标识别过程与CNN基本相同,分为预处理、特征提取和分类三部分。文献对数据的预处理是幅度的L2归一化和基于质心对准的时移补偿。比较半空间和全空间不同数据集下的分类识别结果,全空间数据集的识别率更高,但半空间数据集更贴近实际情况,与其他模型结果相比,识别率有较大提升。比较模型有传统的线性判别分析(Linear Discriminate Analysis,LDA)、主成分分析(Principal Component Analysis,PCA)、线性支持向量机(Linear Support Vector Machine,LSVM)和神经网络模型去噪稀疏自动编码器(Denoise Sparse Autoencoder,D1S1AE)、深度置信网络(Deep Belief Network,DBN)。
西安电子科技大学的陈渤[26]团队建立了栈式校正自动编码器模型(Stacked Corrective Autoencoder,S2C2AE),模型的校正特性体现在对每帧HRRP進行求平均。在马氏距离准则下,考虑各帧HRRP之间的协方差矩阵建立损失函数。对不同层数的S2C2AE与S2D1AE、DBN以及传统方法的识别结果进行比较。实验表明,HRRP的平均轮廓具有更平滑、更简洁的信号形式,能提取更抽象有用的层次特征,可以有效解决散斑效应和异常值,使模型具有更好的泛化性能。数据集来源于3种飞机的实测数据,并对数据集进行了质心对准和L2归一化预处理。该团队也对S2RAE[27](Stacked Robust Autoencoder)、RVAE[28-29](Robust Variational Autoencoder)、RAN[30-31](Recurrent Attentional Network)模型在相同数据集下的识别性能进行了详细研究。
南京航空航天大学的王彩云等人[32]将卷积稀疏编码器与多分类器融合对HRRP目标进行识别。首先利用卷积稀疏编码器对HRRP进行特征提取,达到压缩HRRP数据的效果。然后利用随机森林分类器、朴素贝叶斯分类器和最小值分类器对提取的特征进行预分类,再利用多数投票法将3个预测结果进行融合,得到最后的识别结果。文献对5种飞机目标的HRRP仿真数据进行实验验证,结果表明,该模型准确率较高,对噪声的鲁棒性较好。南京航空航天大学的张欢[33]用SVM对利用S2AE模型对数据降维后的特征进行目标分类,分析了S2AE模型不同层节点数对识别率的影响。雷达目标HRRP数据库来自于仿真软件对Su27、J6和M2K 3种飞机的全方位HRRP数值计算。海军工程大学的张建强等人[34]也做了类似研究。
基于不同AE的HRRP目标识别研究广泛,主要集中在分析扩展和改进AE结构对识别准确率的提高,以及不同深度AE结构对识别准确率的影响方面。相比于不同AE结构的组合,引入卷积操作对目标识别的准确率提高更明显,识别结果均优于传统方法。
3 基于改进深度学习网络的HRRP目标识别
3.1 基于CDNN的HRRP目标识别研究
电子科技大学的廖阔等人[35]提出了一种CDNN(Concatenated Deep Neural Networks)网络结构。该结构由多个浅层神经子网络(Shallow Neural Sub-Networks,SNSN)的隐层连接而成。SNSN的结构如图3所示。
SNSN由1个输入层、2个隐藏层和1个输出层组成。图中x表示原始的HRRP数据,a(k-1)2表示第k-1层SNSN第2层隐藏层的特征,aki表示第k个SNSN网络第i层的特征,{Wki, bki}表示第k个SNSN网络第i层的权重矩阵和偏差值。文献将原始HRRP数据与上一层SNSN提取的特征进行融合作为下一层SNSN的输入层,以此解决深层神经网络训练过程中可能出现的梯度消失、爆炸和过拟合的问题。数据集为4种飞机目标的仿真和实测数据。在对数据集扩充的基础上进行了二级标签编码,减少提取特征之间的类内差异,增加类间差异。文献分析了不同级联层数对识别率的影响,并用多证据融合理论进一步提高了系统的识别率,与其他算法相比,对各个目标的识别率都有较大提高。
3.2 基于S2AE和ELM融合的HRRP目标识别研究
文献[36]提出了一种基于S2AE和正则化极限学习机(Extreme Learning Machine,ELM)的HRRP分类识别方法,充分利用S2AE和ELM各自的优点以提高识别性能。文献[36]网络结构如图4所示。
利用S2AE提取各隐藏层的深层特征,利用ELM快速的学习速度和良好的泛化能力减少训练时间。实验表明,该模型与其他模型相比识别率更高,训练时间更短,并且在小训练样本的情况下也有很好的识别性能。文献提出下一阶段可以利用叠加去噪稀疏自动编码器结构和ELM融合,以提高模型对噪声的鲁棒性。
在基于ELM的目标识别方面,文献[37]分析了引入Dropout后对ELM目标识别能力的影响。实验结果表明,引入Dropout可以解决神经网络过拟合问题,有效提高模型的泛化能力。
3.3 基于Residual和Inception融合的HRRP目标识别研究
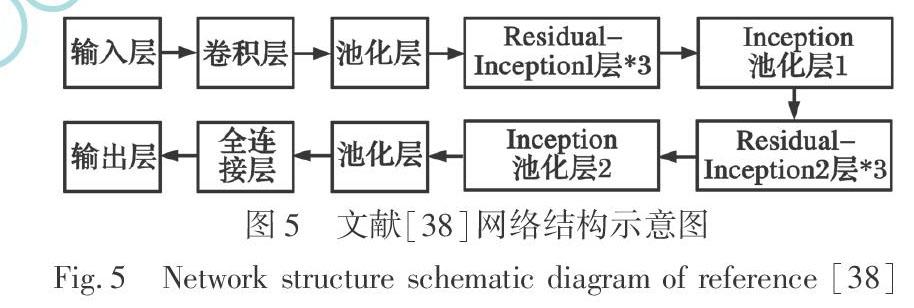
海军航空大学的郭晨等人[38]将Residual网络和Inception网络结合,得到一种新的网络结构,如图5所示。
文献[38]提出一种余弦中心损失函数,以增大类间距离、减小类内距离。仿真结果表明,该网络结构在模型参数更少的情况下,相比于CNN、S2AE、S2C1AE、S2D1AE等网络结构,识别率有较大提升。文献也分析了信噪比和数据集角度不一致对模型识别结果的影响。数据集来源于对7种舰船模型的仿真计算和数据扩充。在此数据集基础上,该团队还提出了一种基于深度多尺度一维CNN的HRRP识别方法[39]和基于特征金字塔融合轻量CNN的HRRP识別方法[40]。文献[39]建立3种多尺度卷积层和2种多尺度降采样层,以替换传统CNN网络中的卷积层和下采样层,同时建立融合软最大值和中心损失的损失函数。利用多尺度卷积核提取HRRP不同精细度的特征,通过新的损失函数减少所提特征的类内距离。文献[40]在传统CNN的基础上,利用HRRP数据多尺度表示构建模型输入,从而保证特征可同时兼顾目标的全局和局部信息,提高特征的鲁棒性,两种方法与CNN和AE模型相比,目标识别准确率均有较大提升。
3.4 基于CNN和LSTM融合HRRP目标识别研究
北京航空航天大学的张耀天等人[41]融合CNN和长短期记忆(Long Short Term Memory,LSTM)网络结构,得到新的深度网络结构,利用多层CNN对信号时频特征提取的一维特征与原始HRRP数据进行拼接,作为LSTM网络的输入进行目标识别。文献[41]的网络结构如图6所示。
该文献分析了不同信噪比情况下,目标识别准确率的变化情况,数据集来源于锥柱体、柱体、2种不同尺寸的锥体等4种简易目标在X波段的仿真计算。
西安电子科技大学的陈渤团队[42]也对基于LSTM结构的目标识别做了研究,他们考虑HRRP样本距离单元间的时序相关特性,提出了双向长短期记忆(Bidirectional Long Short Term Memory,BLSTM)网络的HRRP目标识别方法,结合softmax分类器和投票策略融合输出样本类别,提高了目标识别性能,实验结果表明模型较好地克服了HRRP平移敏感性问题。印度的Jithesh V [43]也对基于LSTM的目标识别进行了研究。
以上基于改进深度学习网络的HRRP目标识别方法将性能良好的不同网络结构融合,并针对HRRP数据特点做出改进,在创建更复杂网络结构的同时,克服深层网络学习过程中梯度消失或爆炸的缺点,与简单深度学习网络相比,改进的网络收敛更快,识别率更高。4 深度学习在HRRP目标识别中面临的挑战
深度学习在雷达HRRP目标识别领域得到了研究人员广泛的关注和细致的研究,同时也取得了很好的识别结果,但仍然存在诸多不足。
首先,没有公开的高质量数据集。深度学习训练模型时需要大量的数据,对HRRP的目标识别任务而言,则需要很多真实、准确且标注好的HRRP数据。在深度学习对图像识别的研究领域,经过多年的发展已经有了手写数字识别的MNIST数据集,物体检测、分割的MS-COCO数据集,单词识别的ImageNet数据集,图像分类的CIFAR-10数据集等。 但是在HRRP目标识别领域没有公开统一的数据库,研究人员使用的大多都是自己团队对舰船、飞机、车辆等目标建模数值计算和微波暗室测量的数据集,少部分团队使用的是对飞机目标的实测数据,并且由于HRRP目标识别应用背景特殊的问题,各研究团队不便于将数据集公开,因此不同研究方法和结论不便于研究人员进行比较分析。不同网络结构针对HRRP的特征提取和目标识别很大程度上依赖于所提供的数据集。 因此,在基于深度学习的HRRP目标识别领域,迫切需要一组公开的高质量数据集以满足研究需要。
其次,模型存在过拟合的问题。深度学习中的“深”一般是指网络层数的多少,随着网络层数的增加,模型能提取到数据更深层次的特征,但是也带来了过拟合的问题。过拟合是由于训练数据与测试数据不完全一致,训练过程中出现的测试误差明显大于训练误差的现象,说明此时网络的泛化能力差。一般而言,网络结构越复杂,网络参数越多,过拟合现象越明显。现阶段解决过拟合的方法有扩充数据集、减少网络参数、减少网络层数、数据正则化、引入Dropout等。
再次,模型的迁移能力有待验证。由于基于HRRP的目标识别应用背景特殊,一般所需识别的目标都是非合作目标,而非合作目标的HRRP实测数据往往难以获取。以非合作目标数值计算仿真和微波暗室测量得到的数据进行模型优化与训练,当应用场景与训练环境有差别时,模型对实际目标识别的准确率有待验证。
最后,模型急需工程化应用,但效果有待验证。如前所述,基于深度学习的HRRP目标识别取得了很好的识别效果,但是由于模型的训练环境与实际应用场景之间存在较大差异,深度学习模型在新的环境下能否有效工作很难保证。同时,基于HRRP的目标识别场景一般对信号处理的时效性和可靠性有很高要求,所建立模型的大小是否合适,实际应用时的计算时效能否满足工程需要也有待验证,将是下一步研究需要重点考虑的问题。
5 结 束 语
从以上研究现状来看,深度学习算法可以自动提取HRRP数据的有效深层特征,以实现高准确率的目标识别,降低了传统方法中提取目标特征时对研究人员的依赖。但是,由于没有公开的高质量数据集,不同研究团队提出的深度学习算法不便于相互比较和验证,一定程度上限制了深度学习在HRRP目标识别上的应用和发展。同时,由于基于HRRP的目标识别一般应用于非合作目标,模型在真实场景中的识别能力也有待验证。下一阶段,基于深度学习的HRRP目标识别可以重点研究新的深度学习结构对识别效果的改进,以及算法在实际场景中的应用问题。
参考文献:
[1] Jacobs S P, OSullivan J A. Automatic Target Recognition Using Sequences of High Resolution Radar Range-Profiles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(2): 364-381.
[2] Copsey K, Webb A. Bayesian Gamma Mixture Model Approach to Radar Target Recognition[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1201-1217.
[3] Chen B, Liu H W, Bao Z. PCA and Kernel PCA for Radar High Range Resolution Profiles Recognition[C]∥IEEE International Radar Conference, Arlington, 2005.
[4] Zyweck A, Bogner R E. Radar Target Classification of Commercial Aircraft[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(2): 598-606.
[5] Xiong W, Zhang G, Liu S, et al. Multiscale Kernel Sparse Coding-Based Classifier for HRRP Radar Target Recognition[J]. IET Radar, Sonar & Navigation, 2016, 10(9): 1594-1602.
[6] Liu H W, Feng B, Chen B, et al. Radar High-Resolution Range Profiles Target Recognition Based on Stable Dictionary Learning[J]. IET Radar, Sonar & Navigation, 2016, 10(2): 228-237.
[7] Zhou D Y. Radar Target HRRP Recognition Based on Reconstructive and Discriminative Dictionary Learning[J]. Signal Processing, 2016, 126: 52-64.
[8] Du L, Wang P H, Liu H W, et al. Radar HRRP Target Recognition Based on Dynamic Multi-Task Hidden Markov Model[C]∥ IEEE RadarCon (RADAR) , Kansas City, 2011.
[9] 王鵬辉,夏双志,潘勉,等. 基于多模态平稳序列建模的雷达高分辨距离像有限样本目标识别方法[J]. 光学学报,2012, 32(5): 276-285.
Wang Penghui,Xia Shuangzhi,Pan Mian,et al. A New Method Based on Multimodal Stationary Sequence Modeling for Radar HRRP Target Recognition under Small Training Set Conditions[J]. Acta Optica Sinica, 2012,32(5): 276-285. (in Chinese)
[10] Zhang S, Dong Y H, Fu H Y, et al. A Spectral Reconstruction Algorithm of Miniature Spectrometer Based on Sparse Optimization and Dictionary Learning[J]. Sensors, 2018, 18(2):644.
[11] Zhou Y, Wang H P, Xu F, et al. Polarimetric SAR Image Classification Using Deep Convolutional Neural Networks[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1935-1939.
[12] Wang L, Scott K A, Xu L L, et al. Sea Ice Concentration Estimation During Melt from Dual-Pol SAR Scenes Using Deep Convolutional Neural Networks: A Case Study[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(8): 4524-4533.
[13] Pei J F, Huang Y L, Sun Z C, et al. Multiview Synthetic Aperture Radar Automatic Target Recognition Optimization: Modeling and Implementation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(11): 6425-6439.
[14] Leclerc M, Tharmarasa R, Florea M C, et al. Ship Classification Using Deep Learning Techniques for Maritime Target Tracking[C]∥ 21st International Conference on Information Fusion, Cambridge, UK, 2018.
[15] Fu H X, Li Y, Wang Y C, et al. Maritime Ship Targets Recognition with Deep Learning[C]∥37th Chinese Control Conference, Wuhan, China, 2018.
[16] Xing S H, Zhang S K. Ship Model Recognition Based on Convolutional Neural Networks[C]∥ IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 2018.
[17] 王金传,谭喜成,王召海,等. 基于Faster R-CNN深度网络的遥感影像目标识别方法研究[J]. 地球信息科学学报,2018, 20(10): 1500-1508.
Wang Jinchuan,Tan Xicheng,Wang Zhaohai,et al. Faster R-CNN Deep Learning Network Based Object Recognition of Remote Sensing Image[J]. Journal of Geo-Information Science,2018, 20(10): 1500-1508. (in Chinese)
[18] Karabaylr O, Yücedagˇ O M, Kartal M Z, et al. Convolutional Neural Networks-Based Ship Target Recognition Using High Resolution Range Profiles[C]∥The 18th International Radar Symposium, Prague, Czech, 2017.
[19] 殷和义,郭尊华. 一维卷积神经网络用于雷达高分辨率距离像识别[J]. 电讯技术,2018, 58(10): 1121-1126.
Yin Heyi,Guo Zunhua. Radar HRRP Target Recognition with One-Dimensional CNN[J]. Telecommunication Engineering,2018, 58(10): 1121-1126. (in Chinese)
[20] Lundén J, Koivunen V. Deep Learning for HRRP-Based Target Recognition in Multistatic Radar Systems[C]∥2016 IEEE Radar Conference, Philadelphia, USA, 2016.
[21] 蓋晴晴,韩玉兵,南华,等. 基于深度卷积神经网络的极化雷达目标识别[J]. 电波科学学报,2018, 33(5): 575-582.
Gai Qingqing,Han Yubing,Nan Hua,et al. Polarimetric Radar Target Recognition Based on Depth Convolution Neural Network[J]. Chinese Journal of Radio Science,2018, 33(5): 575-582. (in Chinese)
[22] Visentin T, Sagainov A, Hasch J, et al. Classification of Objects in Polarimetric Radar Images Using CNNs at 77 GHz[C]∥2017 Asia Pacific Microwave Conference (APMC), Kuala Lumpur, Malaysia, 2017.
[23] 杨予昊,孙晶明,虞盛康,等. 基于卷积神经网络的高分辨距离像目标识别[J]. 现代雷达,2017, 39(12): 24-28.
Yang Yuhao,Sun Jingming,Yu Shengkang,et al. High Resolution Range Profile Target Recognition Based on Convolutional Neural Network[J]. Modern Radar,2017, 39(12): 24-28. (in Chinese)
[24] 王容川,庄志洪,王宏波,等. 基于卷积神经网络的雷达目标HRRP分类识别方法[J]. 现代雷达,2019, 41(5): 33-38.
Wang Rongchuan,Zhuang Zhihong,Wang Hongbo,et al. HRRP Classification and Recognition Method of Radar Target Based on Convolutional Neural Network[J]. Modern Radar,2019, 41(5): 33-38. (in Chinese)
[25] Yu S H, Xie Y J. Application of a Convolutional Autoencoder to Half Space Radar HRRP Recognition[C]∥ 2018 International Conference on Wavelet Analysis and Pattern Recognition (ICWAPR), Chengdu, China, 2018.
[26] Feng B, Chen B, Liu H W. Radar HRRP Target Recognition with Deep Networks[J]. Pattern Recognition, 2017, 61: 379-393.
[27] 冯博,陈渤,王鹏辉,等. 基于稳健深层网络的雷达高分辨距离像目标特征提取算法[J]. 电子与信息学报,2014,36(12): 2949-2955.
Feng Bo,Chen Bo,Wang Penghui,et al. Feature Extraction Method for Radar High Resolution Range Profile Targets Based on Robust Deep Networks[J]. Journal of Electronics & Information Technology,2014,36(12): 2949-2955. (in Chinese)
[28] Zhai Y, Chen B, Zhang H, et al. Robust Variational Auto-Encoder for Radar HRRP Target Recognition[C]∥International Conference on Intelligent Science and Big Data Engineering, Dalian, China, 2017: 356-367.
[29] 翟颖. 基于自编码模型的雷达高分辨距离像目标识别方法研究[D]. 西安: 西安电子科技大学,2018.
Zhai Ying. Study of Radar High Range Resolution Profiles Target Recognition Based on Auto-Encoder[D]. Xian: Xidian University,2018. (in Chinese)
[30] 徐彬,陈渤,刘宏伟,等. 基于注意循环神经网络模型的雷达高分辨率距离像目标识别[J]. 电子与信息学报,2016, 38(12): 2988-2995.
Xu Bin,Chen Bo,Liu Hongwei,et al. Attention-Based Recurrent Neural Network Model for Radar High-Resolution Range Profile Target Recognition[J]. Journal of Electronics & Information Technology,2016, 38(12): 2988-2995. (in Chinese)
[31] Xu B, Chen B, Wan J W, et al. Target-Aware Recurrent Attentional Network for Radar HRRP Target Recognition[J]. Signal Processing, 2018, 155: 268-280.
[32] 王彩云,胡允侃,李曉飞,等. 基于卷积稀疏编码与多分类器融合的雷达HRRP目标识别方法[J]. 系统工程与电子技术,2018, 40(11): 2433-2437.
Wang Caiyun,Hu Yunkan,Li Xiaofei,et al. Radar HRRP Target Recognition Based on Convolutional Sparse Coding and Multi-Classifier Fusion[J]. Systems Engineering and Electronics,2018, 40(11): 2433-2437. (in Chinese)
[33] 张欢. 基于射频隐身的机载雷达系统软件实现及HRRP目标识别研究[D]. 南京: 南京航空航天大学,2016.
Zhang Huan. RF Stealth Based Airborne Radar System Simulation and HRRP Target Recognition Research[D]. Nanjing: Nanjing University of Aeronautics and Astronautics,2016. (in Chinese)
[34] 张建强,汪厚祥,杨红梅. 基于自编码神经网络的高分辨率距离像降维法[J]. 解放军理工大学学报:自然科学版,2016,17(1): 31-37.
Zhang Jianqiang,Wang Houxiang,Yang Hongmei. Dimension Reduction Method of High Resolution Range Profile Based on Autoencoder[J]. Journal of PLA University of Science and Technology: Natural Science Edition,2016,17(1): 31-37. (in Chinese)
[35] Liao K, Si J X, Zhu F Q, et al. Radar HRRP Target Recognition Based on Concatenated Deep Neural Networks[J]. IEEE Access, 2018(6): 29211-29218.
[36] Zhao F X, Liu Y X, Huo K, et al. Radar HRRP Target Recognition Based on Stacked Autoencoder and Extreme Learning Machine[J]. Sensors, 2018, 18(1):173.
[37] 赵飞翔,刘永祥,霍凯. 一种基于Dropout约束深度极限学习机的雷达目标分类算法[J]. 雷达学报,2018, 7(5): 613-621.
Zhao Feixiang,Liu Yongxiang,Huo Kai. A Radar Target Classification Algorithm Based on Dropout Constrained Deep Extreme Learning Machine[J]. Journal of Radars,2018,7(5): 613-621. (in Chinese)
[38] Guo C, He Y, Wang H P, et al. Radar HRRP Target Recognition Based on Deep One-Dimensional Residual-Inception Network[J/OL]. IEEE Access.DOI: 10.1109/ACCESS.2019.2891594.
[39] 郭晨,简涛,徐从安,等. 基于深度多尺度一维卷积神经网络的雷达舰船目标识别[J]. 电子与信息学报,2019, 41(6): 1302-1309.
Guo Chen,Jian Tao,Xu Congan,et al. Radar HRRP Target Recognition Based on Deep Multi-Scale 1D Convolutional Neural Network[J]. Journal of Electronics & Information Technology,2019,41(6): 1302-1309. (in Chinese)
[40] Guo C, Wang H P, Jian T, et al. Radar Target Recognition Based on Feature Pyramid Fusion Lightweight CNN[J]. IEEE Access, 2019,7: 51140-51149.
[41] 张耀天,吴智昌,魏少明,等. 基于CNN+LSTM的空间目标识别[C]∥第十二届全国信号和智能信息处理与应用学术会议,中国杭州,2018: 1-4.
Zhang Yaotian,Wu Zhichang,Wei Shaoming,et al. Spatial Target Recognition Based on CNN and LSTM[C]∥The 12th National Academic Conference on Signal and Intelligent Information Processing and Application,Hangzhou,China,2018: 1-4. (in Chinese)
[42] 徐彬,陈渤,刘家麒,等. 采用双向LSTM模型的雷达HRRP目标识别[J]. 西安电子科技大学学报: 自然科学版,2019, 46(2): 29-34.
Xu Bin,Chen Bo,Liu Jiaqi,et al. Radar HRRP Target Recognition by the Bidirectional LSTM Model[J]. Journal of Xidian University: Natural Science,2019, 46(2): 29-34.
[43] Jithesh V, Sagayaraj M J, Srinivasa K G. LSTM Recurrent Neural Networks for High Resolution Range Profile Based Radar Target Classification[C]∥2017 3rd International Conference on Computational Intelligence & Communication Technology, Ghaziabad, India, 2017.
Review of Radar HRRP Target Recognition Based on Deep Learning
Fu Zhequan*,Li Xiangping,Li Shangsheng,Dan Bo,Wang Xukun
(Naval Aviation University,Yantai 264001, China)
Abstract: The HRRP of radar target contains abundant target information,and radar target recognition based on HRRP has always been the focus and difficulty in the military field.With deep learning becoming a research hotspot in various fields,HRRP target recognition based on deep learning has attracted extensive attention. Compared with the traditional me-thods,deep learning can automatically extract the effective deep features of HRRP and achieve higher re-cognition accuracy. In this paper,the application and research of deep learning algorithm in radar target recognition is reviewed,and four issues that need to be solved in this field are analyzed.
Key words:radar;deep learning;HRRP;target recognition; artificial intelligence
收稿日期: 2019-06-11
作者簡介: 付哲泉(1992-),男,湖北天门人,博士研究生,研究方向是精确制导技术及其智能化。
E-mail:fuzq2413@163.com
引用格式: 付哲泉,李相平,李尚生,等 . 深度学习在雷达目标高分辨距离像识别中的研究综述
[ J].
航空兵器,2020, 27( 3): 37-43.
Fu Zhequan,Li Xiangping,Li Shangsheng,et al.Review of Radar HRRP Target Recognition Based on Deep Learning[ J]. Aero Wea-ponry,2020, 27( 3): 37-43.( in Chinese)
