面向渔业物联网的GPS相对定位策略
2020-07-10曹守启
曹守启,禹 松,张 铮
面向渔业物联网的GPS相对定位策略
曹守启,禹 松,张 铮※
(上海海洋大学工程学院,上海 201306)
现代渔业养殖朝着精细化的方向发展,渔业物联网的应用越来越广泛。对于部署的终端节点,除了需要获取环境感知信息,还必需获取节点的位置信息,这样采集数据才有应用价值。该研究提出了一种面向渔业物联网应用的基于LoRa(Long Range)网络的低成本GPS(Global Positioning System)相对定位方法。首先通过误差分析建立相对定位策略数据模型,然后设计了基于LoRa网络的相对定位方法和改进的时分多址(Time Division Multiple Access, TDMA)传输策略,实现了高精度定位和高能效数据传输,最后设计了LoRa物联网硬件节点并在近海渔场进行了部署测试,试验数据表明了该文提出方法的有效性与可靠性。在采用低成本GPS商用模块的情况下,距离网关1 000和499 m的终端节点的平均定位精度由10 m分别提高到4.8和2.4 m,数据投递率由80%提高到95%以上。
水产养殖;物联网;GPS;LoRa;时间同步
0 引 言
现代水产养殖规模化、精细化成为趋势,低成本、高品质成为需求。渔业物联网(Internet of Things, IOT)技术的研究与应用越来越广泛[1-4]。渔业物联网的终端节点除了静态监测点以外,还有大量以浮标、鱼排、网箱等为载体的处于浮动状态的节点;因此如何获取高精度的位置信息已成为目前渔业物联网研究的热点之一。
物联网定位技术往往是和物联网通信技术结合在一起的。目前多种无线通信技术运用于渔业物联网,如基于ZigBee无线传输网络的水产养殖环境监测系统[5-6];采用WiFi网状组网配置方法设计基于物联网的自动化养鱼辅助系统[7];基于全球移动通信系统(Global System for Mobile Communications, GSM)的优势设计水质监控系统等[8]。由于ZigBee技术传输距离短,覆盖范围小[9],WiFi技术功耗高[10],GSM需要按流量计费[11],且有些偏远地区或近海海域的网络信号尚未覆盖等因素,其都无法完全满足环境复杂、覆盖面积广的渔业物联网应用需求。
LoRa(Long Range)是一种低功耗长距离无线通信技术,目前其产业链已经非常成熟和完善[12]。LoRa无线通信技术经过Semtech,美国思科、IBM等组成的LoRa联盟全球推广后,已成为物联网应用的重要基础技术[12]。不同于传统的无线系统为了实现低功耗基于频移键控调制当作物理层,LoRa是利用线性调频扩频调制,拥有和频移键控调制技术一样的低功耗特点,而且传输距离也显著得到了提高[13]。LoRa的工作频率是在1 GHz以下,包含109、433、866 MHz等频率。得益于LoRa使用新型扩频调制技术,用户可以自定义不同的扩频因子和带宽[13]来满足不同的距离和需求。此外,LoRa通信时的穿透能力因为使用的扩频技术而得以增强,所以能够在相对复杂的环境中使用。所以LoRa技术在功耗、无线传输距离、穿透能力和组网[14-17]等方面有明显的优势。因此,本研究采用低功耗长距离的LoRa无线通信技术作为相对定位系统中数据通信链路。
物联网节点的定位方法主要有以下3种:
1) 基于接收信号的强度指示(Received Signal Strength Indicator, RSSI)测量和路径损耗模型的定位。此方法要求预先知道网关的位置[18]。然后可以粗略计算区域内的终端设备的位置。将RSSI数据与路径损耗模型相结合,可以更准确地计算位置。Islam等[19]通过试验测量RSSI信号强度,并使用路径损耗模型研究非视线和视线条件下RSSI值的分布和距离之间的关系。Lam等[20]研究了室外环境下基于LoRa信号的路径损耗模型的网关选择策略。为了减少网关噪音引起的大量定位误差,提出了一种基于K-means聚类[21]的最优网关选择方法。
2)基于到达时间差(Time Difference of Arrival, TDOA)的定位。基于TDOA的定位方法需要节点之间的时间同步[22]。LoRa终端设备向LoRa网关发送上行分组。每个网关分别记录分组到达时间。网络中的定位服务器计算到达时间差,然后确定终端设备的位置[23]。Kim等[24]使用SX1272芯片,应用基于时差的定位方法证明其可以用于LoRa网络定位。此类方法对硬件设备时间同步的精度要求很高。
3)全球定位系统(Global Positioning System, GPS)是通过卫星测距对节点进行定位的,是目前应用最广的定位系统[25]。在交通物流、市政管理、安全检测、精准农业、自动驾驶等行业发展迅速。卫星定位又分为单点定位和相对定位,单点定位对测量过程中产生的各种误差调节困难,故误差较大[26]。采用差分技术可有效提高定位精度。目前常用的GPS差分定位技术分为伪距差分GPS[27]和载波相位差分GPS[28],其定位精度分别可达到亚米级和厘米级。虽然精度很高,但需要地面基站且差分设备价格不菲,无法广泛应用于渔业养殖。
对于渔业养殖,掌握养殖区域内各种渔业装备的相互位置关系对养殖户的有效管理和监控具有重要意义,尤其是在近海和大面积渔业养殖的应用中。因此,本研究提出了一种基于LoRa网络的低成本GPS相对定位方法,来确定养殖区域内各个物联网节点的坐标。首先通过误差分析建立相对定位策略数据模型,然后设计了利用GPS接收机秒脉冲信号与时间电文进行高精度时间同步的方法,以保证GPS信号同步采集,在此基础上设计了基于LoRa网络的相对定位方法和改进的时分多址传输策略,实现了高精度定位和高能效数据传输。
1 基于LoRa网络的GPS相对定位原理
1.1 系统架构
本方案的系统架构如图1所示,LoRa网关与LoRa终端节点构成星形拓扑结构。LoRa网关和终端节点都集成GPS模块、STM32L051单片机和LoRa射频模块,GPS模块用于定位和授时。终端节点还集成各种环境监测传感器。在渔业物联网应用中,网关固定部署在岸上,终端节点部署在监测环境中,如固定监测点、浮标、鱼排、无人船等浮动或移动载体。

图1 系统架构示意图
1.2 高精度GPS相对定位算法原理
GPS定位过程中,定位精度通常会受3部分误差的影响,第一部分是对每一个用户接收机所公有的,如卫星钟误差、星历误差等;第二部分为不能由用户测量或校正模型来计算的传播延迟误差,如电离层折射和对流层延迟等;第三部分为各用户接收机所固有的误差,如内部噪声、通道延迟、多径效应等。GPS定位各误差分量显示误差主要来源于卫星星历误差和卫星钟差[26],渔业物联网的网关和终端处在同一区域范围内,因此在求取相对位置时各种影响精度的共有因素是近似的。本研究提出的相对定位策略是根据网关和终端的观测位置来求取它们的相对定位坐标。

图2为网关节点、终端节点和卫星定位示意图,网络中的所有节点都带有GPS接收模块,任意节点通过跟踪至少4颗GPS卫星进行自身位置的定位。假设网络中的网关节点可以跟踪到的卫星组合为S={S(=1,2,…,5)},在t时刻得到其在地心坐标系(Earth-Centered, Earth-Fixed, ECEF)下的观测位置(坐标)误差,可以表示为式(1)。
P(t)=G(EΔS(t)−Δρ(t))(1)
式中G、E为网关节点与各卫星的方位特征矩阵;P(t)为t时刻由于卫星时钟差、大气层延迟、多径偏差和接收机硬件偏差等引起的卫星位置偏差;Δρ(t)为t时刻网关节点到各卫星的伪距误差向量。
对于终端节点,可以得到t时刻在ECEF坐标系下的观测位置(坐标)误差如式(2)所示。
P(t)=G(EΔS(t)−Δρ(t))(2)
网关节点和终端节点在时间同步后,按约定的同一时刻获取GPS位置信息,即t=t=,在同一区域范围内,网关节点和监测水域中终端节点几乎可以观测到一样的卫星组合,即S=S=。这样在相同的时刻采用几乎相同的卫星组合进行定位计算时,由卫星时钟差、大气层延迟等引起的卫星位置偏差几乎相同,即:ΔS()=ΔS()。由于网关节点固定,终端节点在养殖水域中,网关节点和终端节点间的位置差异相对于节点到卫星的距离来讲可以忽略,2点与卫星之间的方向角相差很小,因此其方向矢量之间的差异可以忽略不计,即GE≈GE。则将式(2)和(3)代入式(4)可以得到式(5):
ΔD=GΔ()−GΔ()(5)
Δ=GB−GB+GV−GV(6)

令Δ=N−N、Δ=G−G分别表示网关节点、终端节点系统误差和方位矩阵的差分,代入式(5)和式(6),并忽略三阶小量,可以得到网关节点、终端节点的位置误差的数学期望由式(7)所示。

由式(7)可以看出,节点的相对位置误差主要与系统误差和方位矩阵差分的二阶小量有关系,而通常硬件随机误差引起的距离误差相对于系统误差是很小的,因此采用相对定位可以将大多数系统误差消除,从而降低节点之间的相对定位误差。
2 相对定位算法实现
由上述原理可知,为了实现GPS相对定位,网关和终端必须在同一时刻获取GPS信息。本研究首先利用GPS接收机秒脉冲信号与时间电文设计了高精度时间同步的方法。
2.1 时间同步方法
GPS接收机可以提供精确的授时服务,因此在节点开始定位之前,网络中所有节点都通过GPS模块进行授时同步,并且每隔固定周期进行一次同步操作,保证所有节点都具有相同的时间基准。
GPS接收机在接收卫星信息的同时,输出时间信号间隔为1 s的脉冲信号,并且经RS-232串口输出的包含世界标准时间(Coordinated UniversalTime, UTC)的GPS电文信息。GPS接收机的秒脉冲(Pulse Per Second, PPS)信号的脉冲时间精度为1s,可用于进行高精度的时间同步。如图3所示,GPS接收机同时通过串口输出包含世界标准时间(UTC)的GPS电文信息,其输出时刻与PPS脉冲的上升沿对应。每台GPS接收机的PPS信号都是精确同步的。
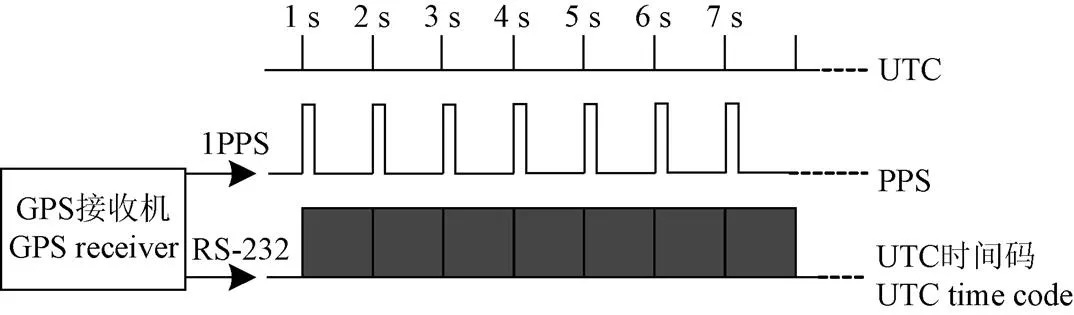
注:UTC是世界标准时间,s;PPS是每秒的脉冲数。
利用接收机串口输出的时间电文来解算当前的UTC时间,但是串口数据的输出和接收都需要消耗一定的时间,STM32单片机也需要时间进行时间电文的解算,而且由于程序的任务调度和中断处理,使得电文的解算时间变得不确定。所有这些因素可能会导致UTC时间解算的延迟,最终影响网络中节点之间的同步精度。
因此为了提高整个网络的同步精度,避免节点之间的时间相差整数个脉冲时间间隔,在设计中利用了GPS接收机的2种时间信号,即PPS信号和时间电文相结合的方式来进行时间同步。将GPS接收机的PPS信号引脚连接到STM32L051单片机的外部中断引脚,利用其脉冲信号来触发中断;将GPS接收机和STM32L051单片机的串口相连接。当GPS接收机的PPS信号触发STM32单片机中断时,进入中断处理程序,中断处理程序打开串口接收时间电文,并解算出当前的时间值。
由于从串口接收时间电文和解算时间值所耗费的时间是不确定的,在中断处理程序中,首先判断当前是否是第一次中断并解算时间电文,如果是则将此次解算的时间值暂存,然后在下一次中断到来时将前一次得到的时间值加上两次中断的间隔秒数,作为当前时刻的时间值设置到节点中。本方法进行网络节点时间同步,可以有效地消除单片机程序处理时间、串口数据收发等延迟误差,系统的时间同步误差可以控制在微秒级,充分满足渔业物联网相对定位的应用需求。
2.2 LoRa通信策略
LoRa网络中终端数量较多且传输的数据量较大的情况下,无线信道碰撞概率会增加。本研究在全网时间同步的基础上,采用时分多址(TDMA)技术,为不同的终端分配不同的时隙,以降低信道碰撞概率。
如图4所示,终端节点的数据上传周期为T,终端节点的GPS或传感器采样时间段为T,之后是网关广播时间段T,网关广播的命令请求包分为定位请求和传感器数据采集请求两种。每个终端分配时隙T,在T时间内终端完成采样数据包P的上报。
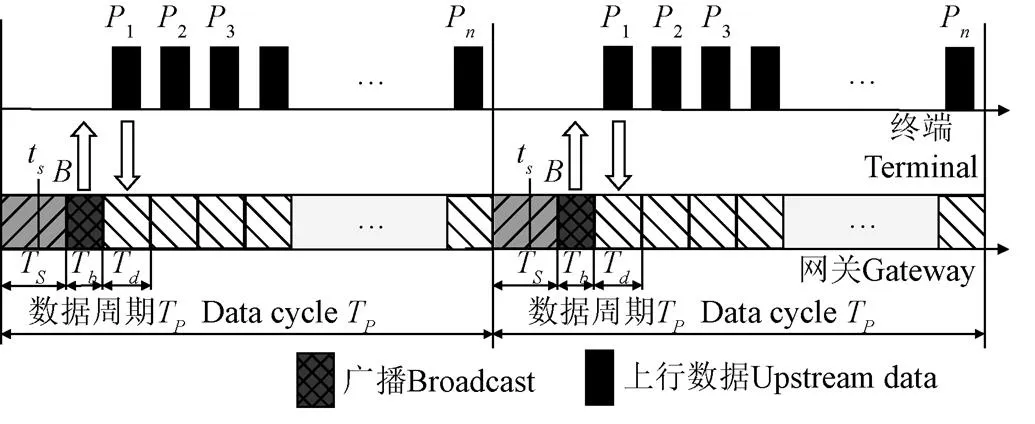
注:TP为数据上传周期,s;TS为采样时间段,s;Tb是网关广播时间段,s;Td为每个终端分配的时隙,s;tS为采样/定位时刻,s;B是网关的命令请求包;P1~Pn是各个终端采样数据包。
网关广播的命令请求包格式如图5a所示,广播地址为00。图5a中的下一包类型ID(Identity),表示下一周期终端节点要执行的命令类型,定位请求设置为1,传感器采集请求设置为2。分组号为终端节点按照布设位置、传感器类型等因素预先进行分组的编号,每组一个分组号。采样/定位时刻t和分组号表示网关与终端节点预约的下一周期同步获取GPS定位信息或进行传感器采样的时刻和对应的终端节点组。该时刻要保证在该时刻之前所有需要参与定位或采样的节点已进入定位或采样就绪状态。如果上一周期接收到的类型ID为1,则本周期在采样时段T内,在预约的定位时刻t,网关获取参与定位的卫星的颗数和卫星编号,入选卫星的信噪比(Signal Noise Ratio, SNR)需大于设定的阈值,卫星颗数和卫星编号添加到命令请求包的数据域;如果上一周期接收到的类型ID为2,则当前终端节点进行传感器采样,网关不进行GPS采样,命令请求包的数据域不包含卫星颗数和卫星编号信息。图5b为终端节点返回的数据包格式,其中数据包类型ID为上一周期接收到的命令请求中的类型ID,值为1则数据域为终端节点的经纬度信息,值为2则数据域为终端节点的传感器采样信息。

图5 命令请求和终端数据包格式
2.3 相对定位
相对定位策略如图4和图5所示。LoRa网络系统的第一个T周期为初始化周期,网关在T时段广播命令请求包,终端节点接收到命令请求包后并不回传数据,而是仅完成自身的初始化工作。第二个T周期开始,各终端节点根据上一周期接收的请求数据类型ID在采样时间段T内完成采集任务,如果是定位请求,网关和终端按约定时刻t获取GPS定位信息;如果是传感器采样请求,则同样在T内按约定的时刻t进行水质或气象感知数据采集。如果当前为定位采集,则网关广播的命令请求包的数据域含当前t时刻获取的卫星颗数和卫星编号集。
终端节点根据上一周期接收的类型ID和分组号,判断是否在本周期的T时段内采样,如果分组号非本节点所在分组,则终端节点在接收完命令请求包后进入休眠状态节省能量,直到下一周期再根据当前接收的类型ID进行相应的操作。如果分组号为本节点所在分组,则终端节点根据类型ID进行相应的采样操作,类型ID为1时,进行相对定位;终端节点按约定时刻t获取GPS定位信息,包括参与定位的卫星颗数和卫星编号,在接收完当前周期的广播命令包后,终端节点将自己获取的参与定位的卫星集与广播包内的网关获取的卫星集进行比较,如果重复的卫星颗数大于预设的阈值,则满足相对定位条件,终端节点在自己分配的时隙向网关上传经纬度信息和重复卫星的颗数;否则不满足条件,放弃本次相对定位,进入休眠状态。网关接收终端上传的数据包,根据重复的卫星颗数和终端节点的经纬度信息计算终端节点的相对坐标。如果没有收到终端节点返回的数据包或重复卫星颗数不满足要求,则网关会在后续周期继续对该节点发出定位请求命令。
终端节点的坐标计算方法如下,以网关为原点,以正东方向为轴,以正北方向为轴,构建渔业物联网坐标系;坐标系内终端节点的坐标计算采用Veness[29]的方法;该方法在已知2点的经纬度信息的情况下,利用椭球模型计算2点间的距离和方位角。该方法转换的距离精度达到0.5 mm,方位角精度达0.000 015",满足渔业物联网定位的应用需求。采用该方法就可将网关和终端节点同时采样的经纬度信息,转化计算为终端节点在该坐标系中的坐标,从而实现相对定位。
举例说明,图6分别为网关和一个终端节点的GPS接收机观测到的卫星序列及信号强度,2台接收机都可以观测到12颗卫星,设定观测卫星信号强度阈值为30 dB,图6a节点的卫星序列由信号强度大于30 dB的7颗卫星组成,并由这7颗卫星组成定位卫星序列进行定位。网关将这7颗卫星的编号加入命令包的数据域,并广播给终端节点,终端节点将接收到的卫星序列编号与自己观测到的卫星序列编号进行比较,如图6b所示。

图6 GPS接收机观测卫星信号强度图
如卫星重复编号大于预设值6,则相对定位有效,终端节点在自己分配的时隙将自己的经纬度信息和定位卫星重复数发给网关,网关计算出终端节点的相对坐标。通常卫星重复编号数预设阈值越高,相对定位精度越高,但该值设置过高,会导致相对定位成功率降低。
网关与终端节点相对定位的流程如图7所示。

图7 网关与终端节点流程图
3 试验验证
3.1 试验硬件
本研究自主研发了1个LoRa物联网网关与5个终端节点,用于GPS相对定位算法的试验验证。网关和终端节点都集成STM32L051单片机,GPS模块采用U-blox公司的NEO-6M型GPS模块,LoRa射频单元采用SX1278芯片。终端节点配备了溶氧(RDO-206型)、pH值(PHG-202型)水质传感器和温度、湿度、气压、光照四合一气象传感器(JXBS-3001型)。相对定位算法和通信协议采用C语言,利用Semtech公司提供的SX1278驱动程序Firmware Drivers V2.1.0,在STM32L051平台上编程实现。
3.2 试验与结果分析
试验在福州近海渔场进行,LoRa网关部署在岸边,作为整个系统的坐标原点,近海渔场中部署5个终端节点,为了便于测量定位精度和试验验证,将其部署在固定测试点,分别为终端1、2、3、4、5,距离网关实际距离分别为100、499、501、1 000和1 001 m,节点位置分布如图8所示。试验数据周期T为1 min。
相对定位策略的定位精度分析测量是根据上述方法建立渔业物联网坐标系,根据各节点的实际位置得出各节点在坐标系中的实际坐标,再分别通过本研究提出的相对定位方法和单点定位方法得出各终端节点在坐标系中的坐标,然后计算各坐标与实际位置坐标的误差。

注:T1、T2、T3、T4、T5分别为5个终端节点,网关为网关节点。
网关周期性广播类型ID为1的定位命令请求包B,约定的GPS采样时刻为t为10 s,终端节点分配的时槽为3 s。LoRa模块的扩频因子设置为11。采集5个终端节点100个周期的数据。由节点的实际部署位置和试验采集数据进行比较得到结果,如图9所示。
图9a为终端节点1与岸边网关进行相对定位的误差分布,终端节点1距离网关100 m,最大相对定位误差为2 m,最小相对定位误差为1.1 m,平均定位误差为1.5 m。图9b为终端节点1单点定位的误差分布,最大单点定位误差为13.4 m,最小单点定位误差为7.6 m,平均定位误差为8.9 m。由试验结果可知采用本研究提出的相对定位算法可以有效提高定位精度。

图9 终端T1的相对定位与单点定位误差分布
图10a~图10d分别为终端节点2、3、4、5与网关相对定位100次的距离误差分布。终端节点2距离网关499 m,最大定位误差为2.9 m,最小定位误差为1.5 m,平均定位误差为2.4 m。终端节点3距离网关501 m,最大定位误差为3 m,最小定位误差为1.3 m,平均定位误差为2.6 m。终端节点4距离网关1 000 m,最大定位误差为5.6 m,最小定位误差为4 m,平均定位误差为4.8 m。终端节点5距离网关1 001 m,最大定位误差为5.4 m,最小定位误差为4.2 m,平均定位误差为4.9 m。通过对试验结果进行分析,可以得出,随着终端节点与网关之间实际距离的增加,相对定位的误差也略有增加;但定位精度都高于单点定位,定位误差几乎比单点定位小1倍。
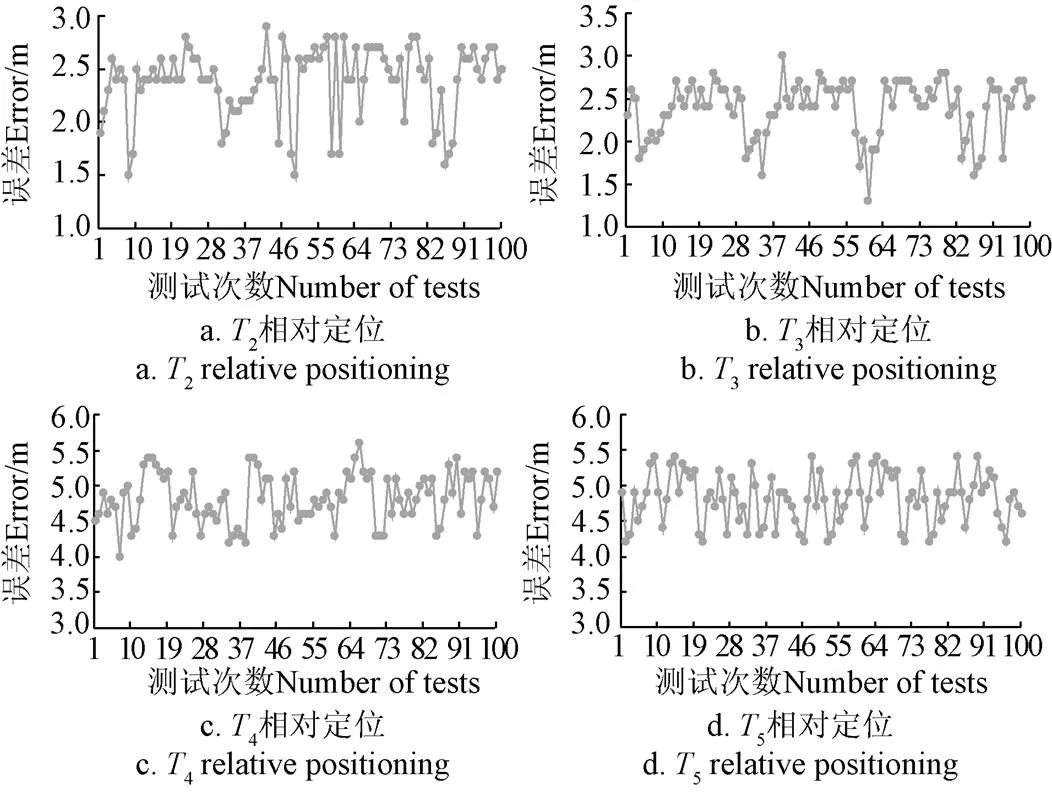
图10 各终端的相对定位误差分布
随后验证了本策略对于传感器信息采集的有效性。网关周期性广播类型ID为2的定位命令请求包,气象传感器分组号为1,气象传感器包括温度、湿度、气压和光照值,采集数据随时刻的变化如图11所示。水质传感器分组号为2,包括溶解氧、温度、pH值,采集数据随时间的变化如图12所示。
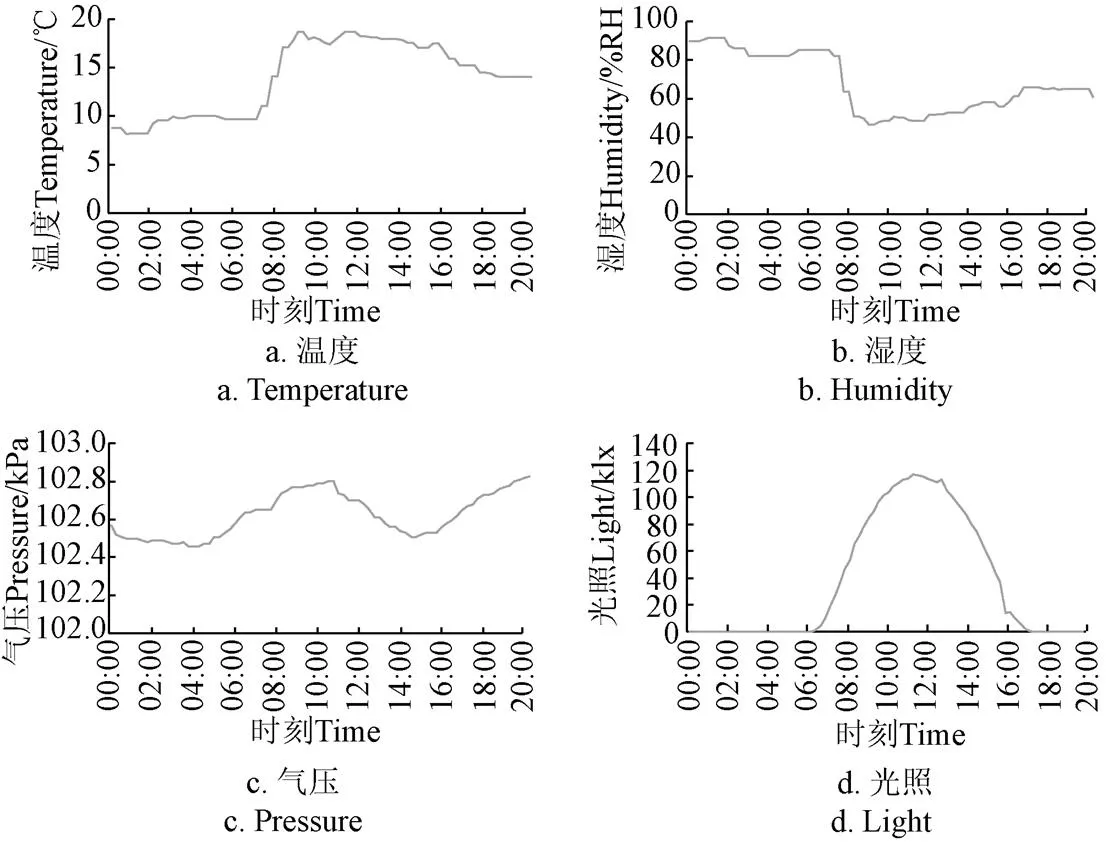
图11 气象传感器采样变化

图12 水质传感器采样变化
为了进一步验证本策略的可靠性和有效性,试验测试了5个终端节点1~5的数据投递率,并同LoRa网络的ALOHA机制进行了比较。网关不进行ACK应答,终端节点不进行数据重传。试验数据如图13所示,由于试验数据周期T为1 min,且只有5个终端节点,所以ALOHA机制下数据包碰撞的概率并不高,5个终端节点的投递率在80%左右。采用本策略的改进TDMA机制后,数据投递率大大提高,5个终端节点的投递率都在95%以上。所以距离网关1 000和499 m的终端节点的数据投递率由80%提高到95%以上。总体来看,随着终端节点与网关距离的增加,数据包的投递率略有下降,这和信号强度的衰减以及信号的水面反射有关。
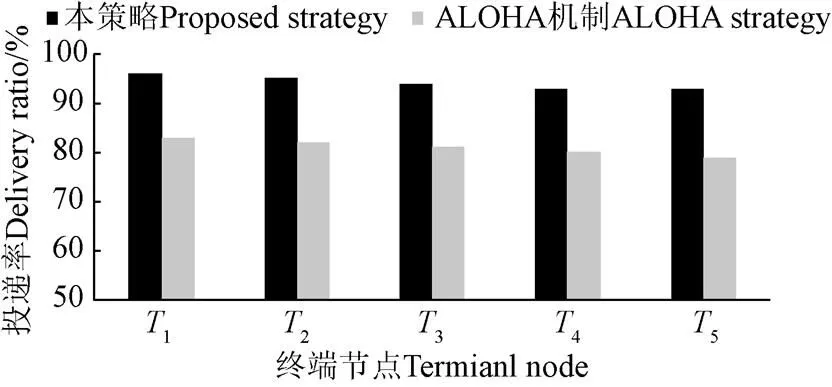
图13 投递率随节点位置的变化
4 结 论
本研究针对渔业物联网中的定位及水产养殖监测应用需求,针对现有的单点定位和差分定位的劣势,在不增加养殖户设备成本的前提下,提出了基于LoRa(Long Range)网络的全球定位系统(Global Positioning System, GPS)相对定位策略。首先提出了GPS相对定位算法原理,然后设计了时间同步方案,并且针对渔业物联网中多终端通信的特点设计了改进的时分多址(Time Division Multiple Access, TDMA)通信策略,在此基础上实现了基于LoRa网络的相对定位算法,最后通过近海渔场现场试验验证了本方案的有效性与可靠性。试验部署的5个终端节点,在采用低成本GPS商用模块的情况下,距离网关1 000和499 m的终端节点的平均定位精度由10 m分别提高到4.8和2.4 m,数据投递率由80%提高到95%以上。本研究的方案在保证LoRa网络大面积覆盖的同时,实现了低成本高精度的渔业物联网节点定位,适宜于在大面积渔业养殖中推广使用。由于渔业和水产养殖应用环境较复杂,下一步需要进行更多的长期的现场试验,对于无人投饲船等移动节点的定位精度和能效性进行深入评估。
[1]李道亮,杨昊. 农业物联网技术研究进展与发展趋势分析[J]. 农业机械学报,2018,49(1):1-20.
Li Daoliang, Yang Hao. State-of-the-art review for internet of things in agriculture[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 1-20. (in Chinese with English abstract)
[2]尹宝全,曹闪闪,傅泽田,等. 水产养殖水质检测与控制技术研究进展分析[J]. 农业机械学报,2019,50(2):1-13.
Yin Baoquan, Cao Shanshan, Fu Zetian, et al. Review and trend analysis of water quality monitoring and control technology in aquaculture[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 1-13. (in Chinese with English abstract)
[3]Xu Guobao, Shen Weiming, Wang Xianbin. Applications of wireless sensor networks in marine environment monitoring: A survey[J]. Sensors, 2014, 14(9): 16932-16954.
[4]张铮,曹守启,朱建平,等. 面向大面积渔业环境监测的长距离低功耗LoRa传感器网络[J]. 农业工程学报,2019,35(1):164-171.
Zhang Zheng, Cao Shouqi, Zhu Jianping, et al. Long-range low power sensor networks with LoRa sensor for large area fishery environment monitoring[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 164-171. (in Chinese with English abstract)
[5]李卓然. 基于嵌入式Linux的水产养殖物联网监测系统设计[J]. 农机化研究,2019,41(11):229-233.
Li Zhuoran. Design of aquaculture network monitoring system based on embedded Linux[J]. Journal of Agricultural Mechanization Research, 2019, 41(11): 229-233. (in Chinese with English abstract)
[6]高伟,高磊,周勇,等. 基于Zig Bee的水产养殖水质控制管理系统设计[J]. 中国农业科技导报,2018,20(7):74-82.
Gao Wei, Gao Lei, Zhou Yong, et al. Design of aquaculture water quality control management system based on ZigBee[J]. Journal of Agricultural Science and Technology, 2018, 20(7): 74-82. (in Chinese with English abstract)
[7]Rohit M H, TarannumHoque Z, Karim M M. Cost efficient automated pisciculture assistance system using Internet of Things (IoT)[C]//2019 IEEE/ACM 1stInternational Workshop on Software Engineering Research & Practices for the Internet of Things (SERP4IoT). Montreal, Canada, 2019: 49-52.
[8]姚新和. 基于STM32的水质监控系统的设计与实现[D].广州:华南理工大学,2019.
Yao Xinhe. Design and Implementation of Water Quality Monitoring System Based on STM32[D]. Guangzhou: South China University of Technology, 2019.
[9]Pule M, Yahya A, Chuma J. Wireless sensor networks: A survey on monitoring water quality[J]. Journal of Applied Research and Technology, 2017, 15(6): 562-570.
[10]吴宝忠,任振辉,王娟. 基于手机 APP 的温室大棚温湿度自动控制系统设计[J] .中国农机化学报,2018,39(4):68-71.
Wu Baozhong, Ren Zhenhui, Wang Juan. Design of automatic control system for temperature and humidity in greenhouse based on mobile phone APP[J] . Journal of Chinese Agricultural Mechanization, 2018, 39(4): 68-71. (in Chinese with English abstract)
[11]陈磊,许燕,李建军,等. 基于WSN和GSM的智能灌溉控制系统设计与实现[J]. 农机化研究,2017,39(3):175-180,185.
Chen Lei, Xu Yan, Li Jianjun, et al. Intelligent irrigate control system design and implementation based on WSN and GSM[J]. Journal of Agricultural Mechanization Research, 2017, 39(3): 175-180, 185. (in Chinese with English abstract)
[12]Gu Fei, Niu Jianwei, Jiang Landu, et al. Survey of the low power wide area network technologies[J].Journal of Network and Computer Applications, 2020, 149(1): 24-28.
[13]Nolan K E, Guibene W, Kelly M Y. An evaluation of low power wide area network technologies for the internet of things[C]//IWCMC 2016: International Wireless Communications & Mobile Computing Conference, Paphos, Cyprus, 2016: 439-444.
[14]刘朋. LoRa通信技术在差分GPS中的应用研究[D]. 成都:电子科技大学,2018.
Liu Peng. Research on Application of LoRa Communication Technologies in Differential Global Positioning System[D]. Chengdu: University of Electronic Science and Technology of China, 2018. (in Chinese with English abstract)
[15]宋晓霞,陈明,池涛. 基于LoRa的小龙虾生态养殖监控系统设计与实现[J]. 渔业现代化,2019,46(5):22-28,81.
Song Xiaoxia, Chen Ming, Chi Tao. Design and implementation of LoRa-based monitoring system for crayfish ecological aquaculture[J]. Fishery Modernization, 2019, 46(5): 22-28, 81. (in Chinese with English abstract)
[16]Aref M, Sikora A. Free space range measurements with Semtech Lora™ technology[C]//2014 2ndInternational Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems. Offenburg, Germany, 2014: 19-23.
[17]Lewark U J, Antes J, Walheim J, et al. Link budget analysis for future E-band gigabit satellite communication links[J]. CEAS Space Journal, 2013, 4(1): 41-46.
[18]Laoudias C, Moreira A, Kim S, et al. A survey of enabling technologies for network localization, tracking, and navigation[J]. IEEE Communications Surveys & Tutorials, 2018, 20(4): 3607-3644.
[19]Islam B, Islam M T, Nirjon S. Feasibility of LoRa for indoor localization[EB/OL]. [2019-05-31]. https://pdfs.semanticscholar.org/ ab00/c1eacbdd76732b7438ec8e5653f7c875def4.pdf.
[20]Lam K H, Cheung C C, Lee W C. LoRa-based localization systems for noisy outdoor environment.[C]//2017 IEEE 13th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Rome, Italy, 2017: 278-284.
[21]杨俊闯,赵超. K-means聚类算法研究综述[J]. 计算机工程与应用,2019,55(23):7-14,63.
Yang Junchuang, Zhao Chao. Survey on K-means clustering algorithm[J]. Computer Engineering and Applications, 2019, 55(23): 7-14, 63. (in Chinese with English abstract)
[22]Choi W, Chang Y S, Jung Y, et al. Low-power LoRa signal-based outdoor positioning using fingerprint algorithm[J]. ISPRS International Journal of Geo-Information. 2018, 7(11): 440.
[23]LoRa Alliance™ Strategy Committee. LoRa alliance geolocation whitepaper[EB/OL]. [2018-03-31]. https://lora-alliance.org/ resource-hub/lora-alliance-geolocation-whitepaper.
[24]Kim S, Ko J. Low-complexity outdoor localization for long-range, low-power radios[C]//In Proceedings of the 14thAnnual International Conference on Mobile Systems, Applications, and Services Companion, Singapore, 2016: 44.
[25]王金伟,孙毓忠,樊建平. 动态可更新的分布式监测系统的设计与实现[J]. 小型微型计算机系统,2007,28(8):1502-1507.
Wang Jinwei, Sun Yuzhong, Fan Jianping. Design and implementation of dynamic updatable distributed monitoring system[J]. Journal of Chinese Computer Systems, 2007, 28(8): 1502-1507. (in Chinese with English abstract)
[26]刘基余. GNSS卫星导航定位的主要误差:GNSS导航定位误差之二[J]. 数字通信世界,2019,15(2):1-3.
Liu Jiyu. Major errors in GNSS satellite navigation/ positioning: GNSS navigation/positioning error(2)[J]. Digital Communication World, 2019, 15(2): 1-3. (in Chinese with English abstract)
[27]蒋可心. 北斗与GPS伪距差分定位技术研究[C]// 第九届中国卫星导航学术年会论文集:S01 卫星导航应用技术,哈尔滨,2018:172-176.
Jiang Kexin. Research on the technology of positioning between Beidou and GPS pseudo-distance differential[C]// Proceedings of the 9thChina Satellite Navigation Conference: S01 Satellite Navigation Application Technology, Harbin, 2018: 172-176. (in Chinese with English abstract)
[28]李亮,陈晶,冯帅,等. 北斗站间单差载波相位差分定位方法[J]. 中国惯性技术学报,2018,26(5):649-653.
Li Liang, Chen Jing, Feng Shuai, et al. Inter-station differenced carrier phase method for BDS RTK positioning[J]. Journal of Chinese Inertial Technology, 2018, 26(5): 649-653. (in Chinese with English abstract)
[29]Veness C. Vincenty solutions of geodesics on the ellipsoid[EB/OL]. [2018-04-17]. http://www.movable-type.co.uk/ scripts/latlong-vincenty.html.
GPS relative positioning strategies for the fishery Internet of Things
Cao Shouqi,Yu Song, Zhang Zheng※
(,,201306,)
Modern fishery farming is developing in the direction of refinement, and the application of the Internet of Things in fisheries is becoming more and more widely used. For the deployed terminal nodes, in addition to the need to obtain environmental awareness information, it is also necessary to obtain the location information of the node, so that the collected data have application value. Moreover, the higher the positioning accuracy of the node, the better the evaluation of the environmental state and the task execution, especially for the node with a buoy as the carrier. At present, the positioning accuracy of Global Positioning System (GPS) technology widely used is about 10 m, the use of RTK differential technology obtain high positioning accuracy, but the equipment price is too high, so it is not very suitable for fishery application. In this study, a low-cost GPS relative positioning method based on the Long Range (LoRa) network was proposed. First, the relative positioning strategy data model was established through error analysis, and then the relative positioning method based on the LoRa network and improved the Time Division Multiple Access (TDMA) transmission strategies were designed to achieve high-precision positioning and energy-efficient data transmission. The premise of the relative positioning of this study was that time synchronization could be achieved, GPS receiver provided accurate timing service, so before nodes started to locate, all nodes in the network were synchronized through GPS module, and every fixed cycle of synchronization operations, to ensure that all nodes had the same time benchmark. Gateways and terminals caused similar system errors due to atmospheric delay, convection, and ionosphere effects, and improved relative position accuracy through relative positioning calculation. The transmission of data based on the LoRa network was fully taken into account that LoRa was suitable for long-distance transmission, which was sufficient for applications in large fisheries environments. Secondly, the low power consumption of LoRa also reduced the cost of fishery production. When the terminal carried out information collection, LoRa went into a dormant state after the completion of work, which effectively reduced the power consumption. In this study, the latitude and longitude information of the gateway and terminal was set up to consist of an observation sequence consisting of satellite signal strength greater than 30 dB in the observed satellite, and each positioning required that the gateway and the terminal had more than 6 same satellites. Considering a large number of nodes in the Internet of Things system, to prevent information collision affected the positioning accuracy, the introduced TDMA technology assigned each terminal its time slot. Each terminal starts its work according to its task and then uploaded data. The transmission strategy of this study was different from the previous strategy, which stipulated that each cycle should firstly collect or locate the data according to the task broadcast in the previous cycle, then broadcasted the task of the next cycle, and finally the terminal response. This shortened the cycle and increased the reliability of information transmission. Finally, the hardware node was designed and the deployment test was carried out in the offshore fishery. The test calculation took the gateway as the origin, the positive east direction was the x-axis, the north direction is the Y-axis to establish a coordinate system, Vincenty method using the ellipsoid model to ensure the accuracy of the calculation. The experimental data showed the validity and reliability of the proposed method in this study. With a low-cost GPS commercial module, the average positioning accuracy of the terminal nodes 1 000 and 499 m from the gateway increased from 10 m to 4.8 and 2.4 m, respectively, and the data delivery rate increased from 80% to more than 95%.
aquaculture; Internet of Things; GPS; LoRa; time synchronization
曹守启,禹松,张铮. 面向渔业物联网的GPS相对定位策略[J]. 农业工程学报,2020,36(10):158-165.doi:10.11975/j.issn.1002-6819.2020.10.019 http://www.tcsae.org
Cao Shouqi, Yu Song, Zhang Zheng. GPS relative positioning strategies for the fishery Internet of Things[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(10): 158-165. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.10.019 http://www.tcsae.org
2020-03-13
2020-04-01
十三五“蓝色粮仓科技创新”国家重点研发计划项目(2019YFD0900800);上海市科委“创新行动计划”(17050502000)
曹守启,教授,主要从事海洋物联网工程、渔业工程及其自动化等技术研究。Email:sqcao@shou.edu.cn
10.11975/j.issn.1002-6819.2020.10.019
TN929.5; S951.2
A
1002-6819(2020)-10-0158-08
张铮,博士,讲师,主要从事物联网工程,智能仪器设计研究。Email:z-zhang@shou.edu.cn
