油菜精量直播机凸轮摇杆式播量调节机构设计与试验
2020-07-10舒彩霞付云开廖宜涛席日晶廖庆喜
舒彩霞,付云开,王 磊,廖宜涛,席日晶,廖庆喜
油菜精量直播机凸轮摇杆式播量调节机构设计与试验
舒彩霞,付云开,王 磊,廖宜涛,席日晶,廖庆喜
(1. 华中农业大学工学院,武汉 430070;2. 农业农村部长江中下游农业装备重点实验室,武汉 430070)
针对不同区域的油菜种植农艺差异、不同播期播量差异及播量范围变化大的生产实际,该文设计了一种输出轴与输入轴转速速比范围为0.1~0.45的凸轮摇杆式油菜精量直播机播量调节装置。解析了调节机构的基本运动原理,分析了凸轮摇杆机构凸轮轮廓曲线及从动件运动规律,所设计凸轮轮廓曲线呈纺锤形,从动件位移曲线为螺旋曲线,从动件速度变化曲线为一峰三柱点曲线,从动件角速度变化曲线为2条不同振幅与频率的正弦曲线合并而成。开展了播量调节装置速比精确性和对排种器排种性能影响试验。试验结果表明,不同输入轴转速下,速比为0.2~0.45时播量调节装置输出轴转速相对误差值对比速比为0.1~0.2时较小,平均误差低于3.8%;不同输入轴转速、种床带前进速度下播量调节装置对排种器排种性能影响较小,播量调节装置可实现油菜不同播量需求。预调播量为5 500和6 720 g/hm2进行田间试验,结果表明,油菜各行1 m内平均苗数为16和20,符合预调播量;各行苗数一致性变异系数为6.48%和8.19%,播量调节装置满足油菜对变量播种的农艺要求。
农业机械;试验;播量;油菜;调节结构;凸轮连杆机构
0 引 言
油菜是中国主要的油料作物之一,此外,油菜还可菜用、花用、蜜用和肥用等。不同地区、播期所需适宜播量具有明显差异,如新疆地区播量可达7 500 g/hm2,而广泛种植油菜的长江中下游地区播量仅为3 000~4 500 g/hm2,其播量范围变化较大。适宜的播量可提高出苗率、保证有效苗数及提升作物产量[1-2]。开发油菜播种机播量调节装置可满足不同种植农艺要求的油菜播量需求,提高机具利用率及降低种植成本[3-6]。目前适应于油菜种植农艺要求的通用高效播种机已在生产中得到推广应用,但缺少与之匹配的满足调节精度及无级调节的播量调节装置。
无级变量技术作为精准控制播量的关键技术,已成为变量调节的核心解决方案之一[7]。无级变量装置主要有电液式与机械式 2种[8]。电液式无级变量装置结构复杂,主要适用于大型农业机械[9-10]。德国Amazone公司研制的气送式播种机使用液压调节和手动调节无级变速器两种方式改变播量,已广泛用于大田作业[11]。机械式无级变速器结构较简单,运动副主要为低副机构,承载能力较强,更适用于中小型农业机械[12-14]。张东远等[15]设计了双凸轮连杆型排种施肥无级变速器,满足了种肥排量调节的传动比精准性与传动平稳性要求。宋茂华等[16]为提高播种的均匀性,建立株距无级调节器输入转速、输出转速、调节架位移和株距之间的函数模型,减小了滑移率对播种质量的影响。张伏等[17]设计了一种基于MCGS的变量播种控制系统,使用Matlab对机械无级变速器的运动规律进行仿真,结果表明无级变速器输出曲线波动较小,可实现变量播种。综上所述,国内外已对基于变速机构改变排种转速实现播量调节和控制做了深入研究,而适用于油菜等播量较小、播量范围变化大且能无级稳定性调节的播量调节装置研究鲜见报道。
本文针对油菜种植的不同区域、播期所需播量差异及播量相对变化大的问题,设计了一种凸轮摇杆机构的油菜精量直播机播量无级调节装置,解析了凸轮摇杆机构轮廓曲线和运动规律,开展了播量调节装置变量调节精准性、稳定性试验和田间验证试验。
1 整体结构及工作原理
无级播量调节装置主要由2组凸轮-连杆架组成,具体包括箱体、输入轴、连杆架、凸轮、输出轴、弹簧、圆弧导槽。播种机及播量调节装置如图1所示。
播种机作业时,通过地轮将动力传递给输入轴,输入轴带动凸轮机构转动,通过弹簧拉力实现连杆架滚子沿圆弧导槽内部凹槽往复滑动,进而带动输出摇杆往复摆动,通过安装于输出摇杆与输出轴之间的单向离合器实现输出轴的单向转动,2组相同机构交替工作,保证输出摇杆的连续摆动转换为输出轴的无间断转动。通过调节手柄改变圆弧导槽的位置来转换连杆架的运动轨迹,从而保证速比的连续改变,实现播量无级调节。
2 双凸轮摇杆式无级变速调节器机构
2.1 机构运动原理
播量调节机构关键部件工作原理图如图2所示。

注:xOy为基础坐标系,输入轴绕O点转动;ω为输入轴角速度,rad·s-1;圆弧导槽绕F点转动;输出摇杆及输出轴绕D点转动;β为输出轴转动的角度,(°);ABC为连杆架端点;A′B′C′为ABC转动β后的位置;R为圆弧导槽半径,mm;E为圆弧导槽圆心;α为滚子B绕E点转动的角度,(°)。
假设和分别为凸轮的最低点和最高点,和点分别为滚子中心在圆弧导槽上的最高点和最低点,点运动至点时发生摆动,点受连架杆上点牵连运动而在圆弧导槽上往复运动。由图解法可知,凸轮摇杆机构的实质是以为虚拟机架,为虚拟主动摇杆(曲柄),为被动摇杆(曲柄)的双摇杆(双曲柄)机构。由于双摇杆机构存在死点,对传动不利,故本文设计播量调节机构为双曲柄机构。
播量调节机构的活动构件数=4(包括凸轮,刚性件,滚子和摇杆),低副数PL=5(包括转动副,转动副,转动副,滚子包括1个转动副和1个移动副),高副数PH=1(凸轮为高副),根据机构自由度计算公式
=3-2PL-PH(1)
计算可得=1,机构具有确定性的运动。
2.2 输出机构的选择
播量调节机构的输出机构主要由2组相同的摇杆和单向离合器组成,用以实现输出轴的单向无间歇转动。为保证单向离合器以及输出摇杆的承载能力[18],确定摇杆尺寸为内径31 mm,外径35 mm,有效长度41mm。
2.3 连杆机构运动规律分析
播量调节机构是、、和组成的四连杆机构(如图3)。根据双曲柄机构运动条件,机构传动角越大机构传力性能越好[19],为使得与形成的传动角最大,根据几何关系,并考虑播种机尺寸以及模块化设计,选择虚拟连杆机构输出轴与输入轴速比最大时各杆的初始预估值为=50 mm,=34 mm,=110 mm,=40 mm,=115 mm,=81 mm,=41 mm,主动曲柄最大转动角度为25°。

注:r2、r3、r4、r6、r7、r8分别为AB、BC、AC、DE、CD、BE的长度,mm;θ2、θ3、θ4、θ6、θ7、θ8分别为AB、BC、AC、DE、CD、BE与x轴的初始角度,(°)。
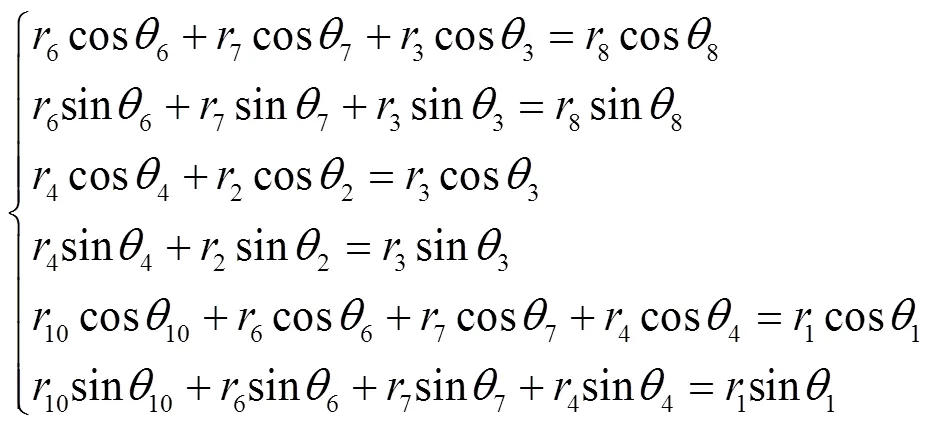
虚拟连杆机构的闭环矢量方程在轴和轴上的投影为


已知2=40 mm,3=115 mm,4=81 mm,根据余弦公式,得4与3的差值为12.53°。针对未知变量3和7,利用牛顿-辛普森方法[20-23]求解非线性方程虚拟连杆机构的位置。

按照牛顿-辛普森方法算法,计算每一个时刻的8、7和3,并根据计算结果绘制各时刻的机构图(图4),8每隔5°绘制1次,共绘制5次。其中点依次经历1~6、点依次经历1~6,点的运动轨迹为1~6,的距离为34 mm。
注:1~6、1~6、1~6分别为不同时刻所对应的位置。
Note:1-6、1-6、1-6are the corresponding positions ofat different time.
图4 牛顿-辛普森方法求解连杆机构运动轨迹
Fig.4 Trajectory of linkage mechanism solved by Newton-Simpson method
由图4计算各点位置,结果如表1。

表1 不同时刻连杆机构长度和角度对应关系
注:1和6为不同时刻虚拟连杆所对应的位置,1和6为不同时刻虚拟连杆所对应的位置,1和6为不同时刻虚拟连杆所对应的位置。
Note:1and6are the corresponding positions of virtual linkageat different times,1and6are the corresponding positions of virtual linkageat different times,1and6are the corresponding positions of virtual linkageat different times.
由图4和表1可知,当转动25°时,转动41.16°,转动61.41°,的长度变化量为20.68 mm。设计该过程为慢速行程,单向离合器处于结合状态,此后点从6运动到1,6开始返程,单向离合器此时处于超越状态,点的返程运动受到凸轮运动的牵连。设计无级变速器2套运动机构交替动作,输入轴运转一周360°,输出摇杆摆动4次,输出摇杆带动单向离合器最大摆动角度取整为41°,输出轴共转动164°,故此时速比为0.45。由此可以确定凸轮的基圆0=30 mm,滚子半径=10 mm。
为了保证机构传力性能良好,连杆传动角应不小于40°~50°,根据圆弧导槽圆心位置的变化(图5)校验传动角可得,在68.35°~72.63°之间变化,符合传动要求。
当圆弧绕点逆时针旋转10°时,点的位置变动到,的长度减小至17.45 mm,1滑动到6,虚拟主动曲柄转动25°,1转动至6,摇杆转动34.33°,此时速比为0.38。即随着圆弧逆时针转动时,速比减小,当共线时,最小,速比最小。当圆弧导槽顺时针转动时,增大,速比增大,即虚拟主动曲柄转过相同角度时,摇杆的输出角度增大,根据式(4)得到图6所示的圆弧导槽逆时针转动10°后的运动轨迹图,符合牛顿-辛普森方法求解的运动规律。

注: E’ 、G’和B’分别为不同时刻E、G、B所对应的位置。

图6 圆弧导槽逆时针转动10°的运动轨迹图
2.4 凸轮机构轮廓曲线和从动件运动规律分析
2.4.1 播量调节机构运动学模型
为得到凸轮轮廓曲线及从动件运动规律,基于图解法原理,以闭环矢量方程建立机构学的运动学数学模型,确定速度、加速度的矢量方程求解超越方程[24-27],结果如图7所示。
以点为坐标原点,水平向右为轴正向,建立笛卡尔坐标系,规定逆时针旋转为正方向,定义的长度为1,与水平夹角为1;长为5,与水平夹角为5;长为9,与水平夹角为9;长为10,与水平夹角为10。闭环矢量方程在轴和轴的投影如式(5)~(6)。

注:1、5、9、10分别为、、、的长度,mm;1、5、9、10分别为、、、与轴的初始角,(°)。
Note:1、5、9、10are the length of、、、,respectively, mm;1、5、9、10are the initial angle between、、、and- axis, respectively, (°).
图7 播量调节机构运动学矢量图
Fig.7 Kinematic vector diagram of kinematics sowing rate adjusting mechanism
对式(5)~(6)求一阶时间导数,由于9、9、10、10、5和5均为常数,式(5)的一阶导数、二阶导数均为0。由式(5)确定输入轴轴心,圆弧导槽的旋转中心和圆弧导槽的圆心。由式(6)对时间的一阶求导可得:






对刚体而言,运动过程中任意内角不变,即:


对式(7)~(12)进行求导,求得播量调节机构加速度方程矩阵为

利用Matlab/simulink建立播量调节机构运动学仿真模型,得到凸轮轮廓曲线和从动件运动规律曲线。
2.4.2 凸轮机构轮廓曲线
结合连杆机构的主动曲柄的摆动规律、凸轮的行程速度变化系数,可以确定以正弦规律变化的推杆运动规律和凸轮的轮廓曲线。凸轮基圆半径0由上文分析已确定为30 mm。
为减小摩擦阻力,提高播量调节机构的传动性能,采用滚子推杆盘型凸轮结构,滚子保证连杆架与凸轮和圆弧导槽的接触为滚动接触。为提高机构工作效率,设计从动件的位移曲线具有急回特性,如图8所示,行程速比系数即为斜率绝对值的比值,故行程速比系数=2。凸轮轮廓线反转法求解示意图如图9所示,推杆的0点摆动到A的过程中,凸轮轮廓曲线从最低点0升程达到最高点H。取输入轴以均匀角速度=20 rad/s旋转,结合行程速比系数,得出凸轮推程运动角为2π/3,凸轮回程运动角为π/3。凸轮的外形结构使得推杆轮的升程时间为回程时间的2倍。
结合各部件之间的定位关系,可知推轮杆变化位移在0~21 mm,即最大位移S=21 mm。为使得0点运动过程中速度和加速度皆连续无突变,避免刚性冲击和柔性冲击,结合反转法[27],使用Matlab进行数值迭代,进而确定凸轮机构的轮廓曲线为如图10所示的纺锤型。分析图10可知:

图8 从动件位移变化规律





注:A0为滚子最低点位置;Ai为滚子最高点位置;H0为滚子在最低点时与凸轮的接触点;Hi为滚子在最高点时与凸轮的接触点;θ0为滚子最低点时对应的凸轮转角,(°);θi为滚子最高点时对应的凸轮转角,(°);ω为输入轴角速度,rad·s-1。

Ⅰ.理论轮廓 Ⅱ.实际轮廓
2.4.3 从动件运动规律分析
设凸轮轮廓上一点的极坐标为(,),点的长度随着角的变化而变化。由凸轮轮廓曲线结合式(15)、式(16)得出从动件的位移曲线(图11a)速度曲线(图 11b)和加速度曲线(图11c)。可得出,从动件的位移曲线为螺旋线,从动件速度曲线为一峰三柱点曲线,从动件加速度规律曲线为2种不同振幅与频率正弦曲线结合而成的曲线,从动件在整个运动过程中的速度和加速度皆连续无突变,避免了刚性冲击,凸轮具有急回特性,符合设计要求。

图11 从动件运动规律示意图
3 播量调节装置性能试验
3.1 试验材料与方法
为探究播量调节装置传动的精确性和平稳性,开展不同工况下输出轴实际转速与理论转速的相对误差测试试验及转速误差对排种性能的影响试验。试验材料为华油杂62,千粒质量为4.67 g,含水率为7.15%。为防止排种器自身因素对播量调节装置速比精准性的影响,速比精准性试验选用气送式集排器和气力式油菜精量排种器[28]2种排种器进行。
播量调节装置与排种器通过链传动连接,以不同速比与转速下安装播量调节装置的排种器播量与未安装播量调节装置的排种器播量的对比来反映其输出轴转速相对误差,评估播量调节装置传动的精确性。为更好地模拟田间作业,使用调速电机为播量调节装置提供20~100 r/min的工作转速。设定播量调节装置的输入转速为5个水平,设定每个转速水平下速比为8个水平,每次试验1 min,重复3次,通过播量随转速和速比的变化规律反映速比的精准性。输出转速相对误差0的计算公式为


稳定性试验选用气力式油菜精量排种器,气力式油菜精量排种器播种1穴1粒,可更好地体现播量调节装置对排种性能及播量的影响,试验以JPZS-12排种器试验台进行检测,试验装置如图12所示。为测试播量调节装置对排种性能的影响,通过改变种床带速度和排种轴转速模拟排种器在田间试验的排种效果。试验按照GB/T 6973—2005《单粒(精密)播种机试验方法》[29]对单体排种器以及装有播量调节装置的排种器排种性能进行试验和测定,设定播量调节装置较优精准性速比。

1.JPZS-12排种器试验台 2.气力式油菜精量排种器 3.负压进气口 4.播量调节装置 5.正压进气口
3.2 试验结果与分析
3.2.1 速比精准性试验结果分析
在不同电机转速下,播量调节装置输出轴转速的相对误差随设定速比变化的曲线如图13所示。由图可知,2种排种器的播量调节装置输出轴转速的相对误差变化曲线相似,当速比处于0.2~0.45时,播量调节装置输出转速相对误差值平均低于3.8%,输出转速相对误差值较小,速比精准性较高;当速比处于0.1~0.2时,其精准性较差,这是由于当速比较低时连杆架机构因惯性易出现运动滑移导致精准性较低,根据新疆和湖北地区多年田间播种试验,油菜播量为3 000~7 000 g/hm2,结合现有播种机播量需求,确定实际田间播种作业时0.1~0.2速比应用较少。在油菜播种常规使用的速比范围0.2及以上播量调节装置速比精准性较高。
3.2.2 播量调节装置对排种性能影响的试验结果分析
由于播量调节装置的输出轴实际转速与理论值的误差将直接影响排种粒距均匀性,同时播量调节装置的输出轴转速应与机组前进速度相匹配。为探究转速误差对粒距均匀性影响,提高播量调节装置输入轴转速与机组前进速度的匹配度,以种床带速度模拟机组前进速度,开展种床带速度及排种轴转速影响试验。考虑到拖拉机体田间行走速度为2~4 km/h,试验通过单因素控制变量法,探究播量调节装置于5种种床带速度(1.8、2.2、3.1、3.45和4.2 km/h)及5种排种轴转速(5、10、15、20和25 r/min)下对排种器排种性能的影响。各试验水平重复3次,以排种器合格指数作为播量调节装置对排种器排种性能影响的评价指标,结果如图14所示。合格指数计算公式为

式中M0为合格指数,%;u为合格粒数;U为试验总粒数粒。
