混有网联车队的高速公路通行能力分析
2020-06-17常鑫李海舰荣建赵晓华王益
常鑫 李海舰 荣建 赵晓华 王益
(北京工业大学 交通工程北京市重点实验室,北京 100124)
近年来,车联网技术综合利用电子技术、无线通信、信息融合、人机交互等技术手段,通过实现车车通信(V2V)、车路通信(V2I),为驾驶员带来了新的驾驶体验和定制化服务,逐渐得到国内外企业和交通从业者越来越多的关注[1- 2]。车联网技术能够实现车辆运动信息的共享和实时获取,具有网联功能的车辆可以通过车载网络形成柔性车队。已有研究表明,有计划、有组织的车队组织模式在货运物流、军方车辆管理等方面能够有效利用道路基础设施和控制策略,实现连续车辆的快速、高效通行[3- 5]。若干的个体车辆组织成柔性车队,能够增加交通运输系统的可控制性和可组织性,不仅可以有效提高道路的安全水平,还可以实现交通系统的全局优化[6- 7]。此外,车队的交通组织形态会降低能源消耗和尾气排放,对低碳出行也有一定的推动作用[8]。
文中研究了车队组织模式对高速公路基本路段通行能力的影响,并针对公路通行能力手册就该部分可能做出的调整及修正给出建议。高速公路基本路段是指在合流区、分流区、交织区、收费站、特长隧道影响之外的路段[9]。Chen等[10]指出,基本路段通行能力影响模型是研究道路瓶颈路段和建立各种微观行为影响模型之前非常重要的一步。网联车辆(Connected Vehicle,CV)是未来交通领域的发展方向。在未来相当长的时间里,CV的渗透率将逐步增长,不同智能化水平的CV将与传统车辆(Regular Vehicle,RV)长期共享有限的道路资源。Amaout等[11]利用仿真手段研究了不同交通需求下不同协同自适应巡航驾驶(Cooperative Adaptive Cruise Control,CACC)车辆渗透率对通行效率的影响,发现当交通需求较小时,CACC车辆的市场占有率对通行效率基本没有影响;而在交通需求较大时,若CACC车辆渗透率大于40%,渗透率的增大对道路通行效率的提升有显著影响。另外,在2018年的TRB(Transportation Research Board)会议上,通行能力和服务水平分会一致同意把车队模式和技术同时纳入HCM(Highway Capacity Manual)的考虑中。
国外学者对网联环境下车队组织对交通流的影响研究较早,且多集中在CACC网联车队渗透率对通行能力的影响方面。例如,Shladover等[12]通过CACC实车实验分析了不同CACC车辆渗透率下的通行能力,当交通流全部为CACC车辆时,单车道通行能力为4 000 veh/h,但没有对车队规模的限制进行研究,同时缺少对通行能力的理论分析;Bujanovic等[13]考虑混有CACC车辆及其退化情况(ACC车辆)的情形,借助HCM2016中不同车型车头时距的分析方法,给出了不同CACC车辆渗透率下的通行能力计算模型,并考虑了车队规模限制,但是仍缺乏对混合交通流基本参数关系的理论解析,不能说明车队规模限制和渗透率变化对交通流基本图影响的本质原因。国内学者对网联环境下混合交通流(特别是混有网联车队的交通流)通行能力的研究还处于起步阶段,仅有少量针对混有CACC车辆的交通流通行能力的仿真研究,其中,秦严严等[14]分析了混有CAAC车辆及考虑其退化的情况,给出了混有CACC车辆的基本图模型解析,但鲜有文献考虑车队组织模式对交通流的影响。鉴于此,文中通过对混有网联车队交通流的解析表达,提出了网联车辆占有率影响下的车辆组态空间分布概率,进而建立了混有网联车队的高速公路基本路段通行能力分析的一般方法。
1 混有网联车队的异质交通流
1.1 异质交通流组态
基于车联网技术,网联车辆可以即时获得前车运行状态,起到驾驶辅助的作用[15]。基于车辆间的通信,空间连续的网联车辆组建为柔性车队,车队内的车辆可以保持更小的车头时距来跟驰前车[16]。假定车队的头车为具有智能网联功能的人工驾驶车辆,在混有网联车辆的混合交通流中,车辆的空间分布具有随机性,由于车辆的类型不同,交通流中将存在不同的车头时距类型。根据车辆是否具有网联功能,可将车辆分为传统人工驾驶车辆和网联车辆;再根据网联车辆是否为车队头车,将其分为车队内跟驰车辆和车队簇头;然后根据车队簇头跟驰的前方车辆是否为传统人工驾驶车辆,将其分为跟驰传统车辆的簇头车辆和跟驰网联车队(车队规模为Zmax)的簇头车辆。因此,混合交通流中的车辆类型有4种,定义为传统车辆RV、跟驰人工车辆的车队簇头CRV1、跟驰网联车队的簇头车辆CRV2、网联车队中的跟驰车辆CACC(见图1)。智能驾驶员模型(IDM)能够有效反映驾驶员在精确获悉前车状态时的智能驾驶特性[14],因此也可较好地反映网联人工驾驶车辆CRV1和CRV2的跟驰行为。设定智能网联车队规模为Zmax,当前方网联车辆组建的车队规模达到Zmax时,后随的网联车辆将重新组建新的车队。鉴于已有研究成果,文中认为CACC模型可有效反映智能网联车队跟驰特性。
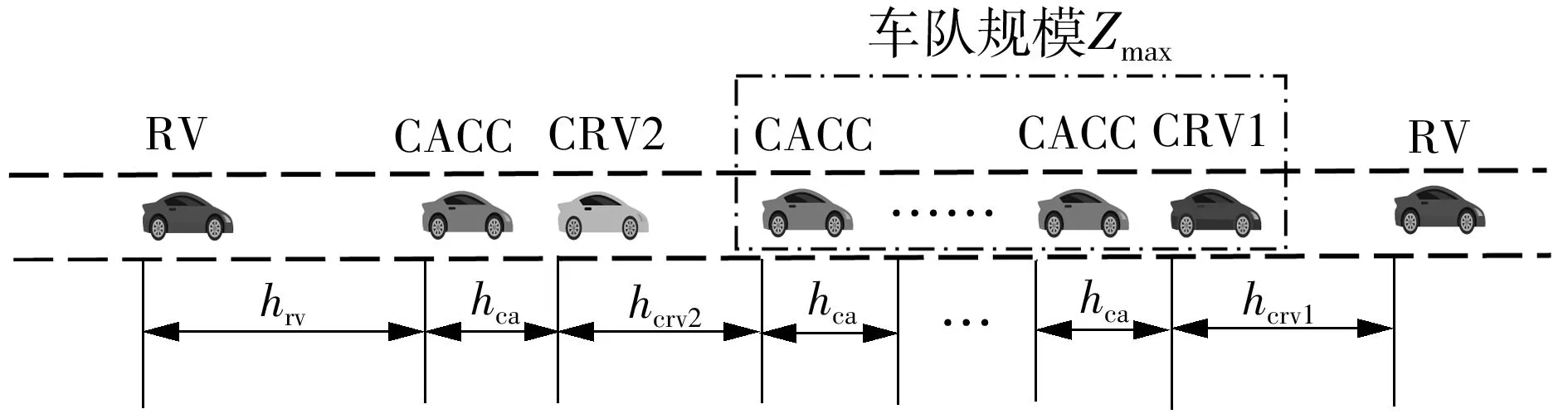
图1 车辆分布示意图Fig.1 Schematic diagram of vehicle distribution
图1中4种混合车辆的车流中将出现4种车头时距,依次定义为:传统车辆车头时距hrv、车队内车辆车头时距hca、跟随传统车辆的网联车辆车头时距hcrv1、跟随网联车队的网联车辆车头时距hcrv2,车辆类型及车头时距的判断逻辑如图2所示。
1.2 车辆组态分布概率及验证
假设道路上网联车辆的渗透率为p,则传统车辆的分布概率为1-p;定义pc(t(i)=n)为车队规模t(i)为n时,车队车头开始向后、车队中车辆位于第i个位置的概率,i=1,2,3,…,n。车队规模n最大为Zmax;其中当n=0时,道路上全为传统车辆,故pc(0)=1-p。当p=0时,道路交通流为传统交通流状态,平均车头时距为hrv。当车队规模n>1且车辆为车队中跟驰车辆位置(即i>1)时,跟驰前车为网联车辆,此时跟驰车辆位置i的平均车头时距为hca,则有
pc(t(i>1)=n)=pc(t(i-1)=n)×p,n=2,3,…,Zmax
(1)
由式(1)可推导得到网联混合交通流中车队规模为n的概率:
pc(t(i)=n)=pc(t(i-1)=n)×p=
pc(t(i=1)=n)×pn-1
(2)
根据1.1节的分析,可知车队簇头车辆有两种跟驰模式:CRV1和CRV2。当为CRV1模式时,
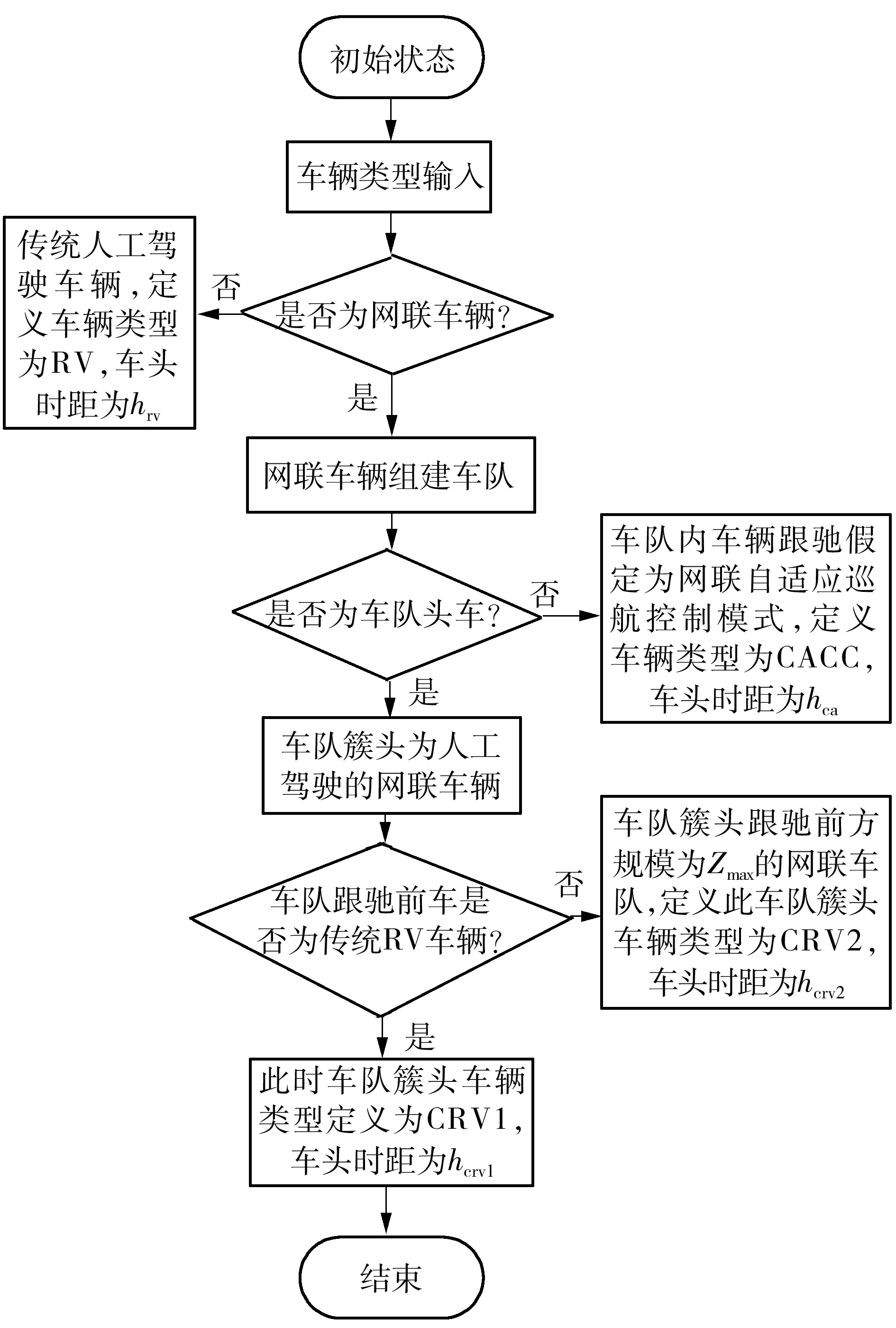
图2 平衡态车头时距类型判断Fig.2 Decision tree on determining balanced time headway
前车为传统车辆,跟驰车辆为网联车辆;当为CRV2模式时,簇头跟驰为网联车队(规模为Zmax);则车头时距模式为hcrv1、hcrv2的概率分别如式(3)和(4)所示:
pc(t(i=1)=n)CRV1=pc(t(i)=0)×p=
(1-p)×p
(3)
pc(t(i=1)=n)CRV2=pc(t(i)=Zmax)×p=
pc(t(i=1)=n)×pZmax
(4)
由式(3)和(4)有
pc(t(i=1)=n)=pc(1)CRV1+pc(1)CRV2=
p(1-p)+pc(t(i=1)=n)×pZmax,
则可得车辆为车队簇头的概率如下:
(5)
由式(4)和(5)可得
pc(1)CRV2=pc(t(i=1)=n)×p=(1-p)×
pZmax+1/(1-pZmax)。
由式(1)和(5)有
p2+…+pZmax-1),
则可得平均车头时距为hca的CACC模式的概率pc(i>1)如下:
(6)
当网联车辆的渗透率为p时,网联混合交通流中4种不同跟驰模式(RV、CRV1、CRV2、CACC)的概率分别见上述理论算式,下面利用随机性仿真实验进行数值验证。
基于Matlab仿真软件进行仿真实验。对于一条有1 000辆车的单车道路段,所有类型车辆随机分布在一条车道上,其中假定网联车辆的概率为p。考虑到网联车辆和传统车辆的相对位置随机分布,根据图2的判断逻辑,在每个p值下仿真100次,统计不同p值下3种不同跟驰模式的网联车辆数量,并计算3种类型不同跟驰模式的网联车数量的均值。同时,可由上述理论算式获得理论值,理论值与仿真结果均值如图3所示。由图3可以看出,仿真结果与理论值基本吻合,验证了理论推导的正确性。
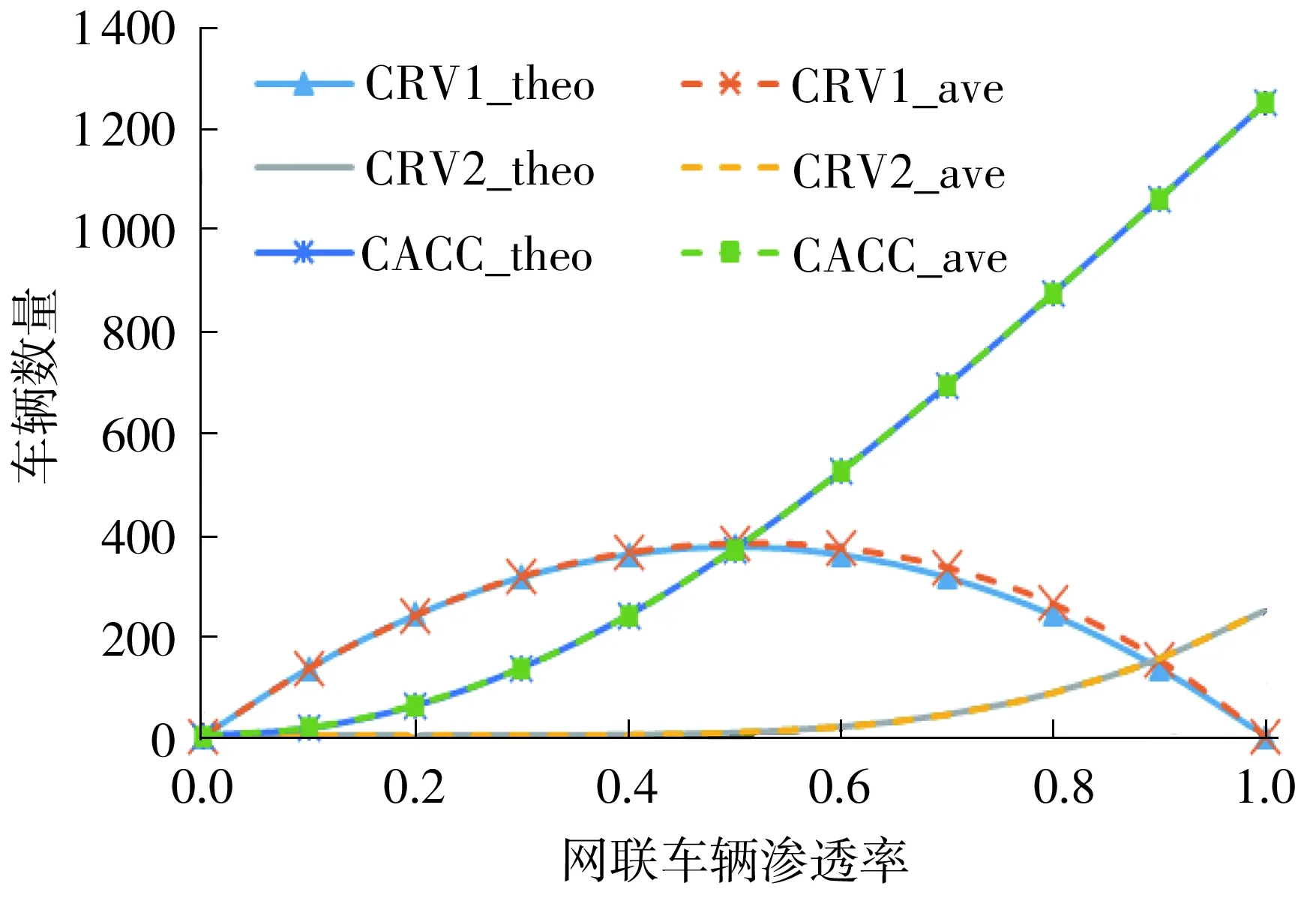
“_theo”表示理论计算值,“_ave”表示数值仿真结果均值
Fig.3 Spatial randomness statistical distribution of connected vehicles
2 基本图分析
2.1 基本图模型解析
针对文中研究的混合交通流,异质交通流由传统车辆(RV)和网联车辆(CV)组成,空间连续的网联车辆组建为柔性车队。当交通流在平衡态速度v下时,相邻车辆的速度差为零,且车辆的加速度为零;三角形基本图要求交通流平衡态的车头间距与平衡态速度之间存在线性关系,因此,异质交通流J类跟驰模式的平衡态车头间距与平衡态速度存在如下函数关系:
δj=vhj+sj
(7)
式中,δj为第j类跟驰模式的平衡态车头间距,v为交通流平衡态速度,hj为第j类跟驰模式的平衡态车头时距,sj为第j类跟驰模式的安全间距。跟驰模式与前导车辆和跟随车辆的类型有关。则可计算获得异质交通流的密度k如下:
(8)
式中,pj为第j类跟驰模式在异质交通流中的概率。
从式(8)可以得到异质交通流密度k关于平衡态速度v的计算关系。为了获得简化的三角形基本图中流量q与密度k之间的计算关系式,将式(8)改为速度v关于密度k的关系式如下:
(9)
因此,由式(9)可得异质交通流三角形基本图的q-k关系式如下:
(10)
式(10)所示q-k关系式描述了异质交通流三角形基本图模型曲线中的拥挤态曲线,而自由流态曲线可认为是自由流速度下的直线段,如图4所示。图4中,vf为自由流速度,C为最大通行能力,km为最大通行能力下的临界密度,kz为阻塞密度,w为拥挤态交通波反向波速。将v=vf代入式(8),可得最大通行能力下的临界密度km的计算公式如下:
(11)

图4 异质交通流基本图Fig.4 Fundamental diagram of heterogeneous traffic flow
则对应的异质交通流最大通行能力为
(12)
异质交通流阻塞时的密度为
(13)
异质交通流拥挤态交通波反向波速为
(14)
由以上基本图推导公式(7)-(14)可知,异质交通流三角形基本图的特征量(最大通行能力C和交通波反向波速w)均由异质交通流中的网联车队规模Zmax、各类跟驰模式的比例pj及对应的平衡态车头时距hj、安全间距sj确定。
2.2 参数敏感性分析
参考文献[17- 18],安全间距sj都设置为7 m,其中包括车辆长度5 m,文中假定所有类型车辆的车身长度相同。依据文献[19],传统车辆平衡态车头时距hrv选择1.5 s;结合文中对CRV1和CRV2车辆的描述,且文中假定hcrv1>hcrv2,根据文献[20- 21]的研究成果,选择CRV1和CRV2车辆扩展后的IDM模型参数中平衡态车头时距分别为:hcrv1=1.2 s,hcrv2=1.0 s;对于CACC车辆,依据文献[12]的研究成果,文中取hca=0.6 s。平衡态速度取0~33 m/s(高速公路自由流速度为33 m/s),假定车队规模最大为8,由式(11)可得如图5所示的网联车辆渗透率p的敏感性分析结果。
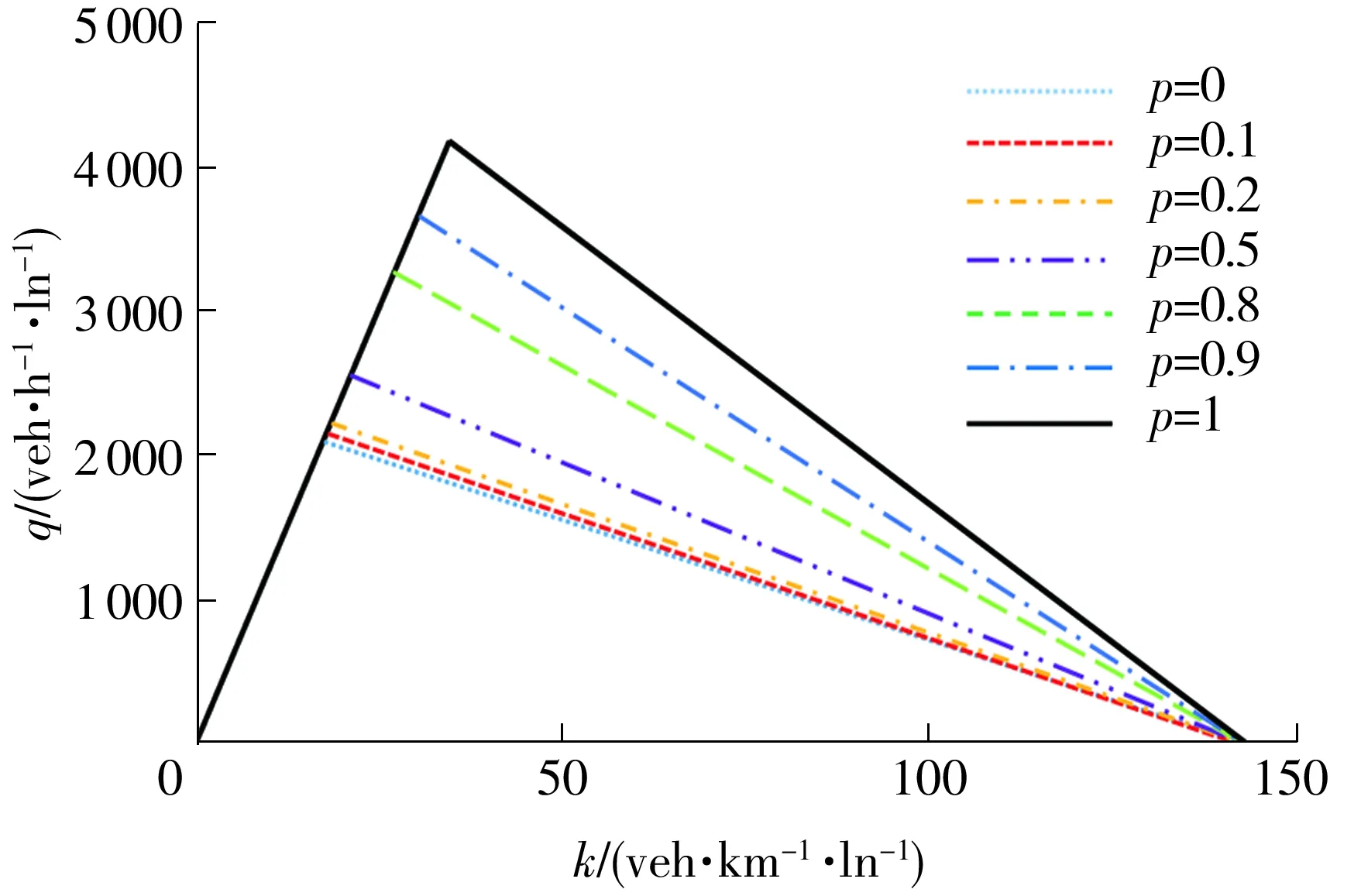
图5 渗透率p的敏感性分析结果Fig.5 Results of sensitivity analysis on p
由图5可以看出:相比于传统车辆交通流,随着网联车辆渗透率的增大,异质交通流最大通行能力逐步提升,且渗透率越接近于1,最大通行能力提升越快;当渗透率为1时,网联车辆组成的交通流最大通行能力可提升将近2倍。
异质交通流hca=0.6 s、vf=33 m/s时,不同网联车辆渗透率p下的车队规模Zmax的敏感性分析结果如图6所示。

图6 车队规模Zmax的敏感性分析结果Fig.6 Results of sensitivity analysis on Zmax
由图6可知:随着网联车辆渗透率的增大,车队规模对异质交通流最大通行能力的影响越来越明显;另外,当车队规模大于4后,车队规模对异质交通流最大通行能力的影响不再显著。
3 异质交通流PCE分析
车辆换算系数(PCE)是研究混合交通流特征的重要参数,合理计算PCE是评估混合交通流对通行能力影响的重要手段。

pc(1)CRV2×hCRV2+pc(i>1)×hCACC
(15)
定义混有网联车队的异质交通流基本通行能力为传统小客车交通流通行能力C0,则基本通行能力C0和异质交通流通行能力C分别为
C0=3 600/hrv
(16)
(17)
参考HCM 2016中大车换算系数的计算方法[22]:
(18)
式中,fHV为混有大车的混合交通流通行能力修正系数,pHV为大车比例,PCEHV为混合交通流中大车的换算系数,CH为混合交通流通行能力。依据式(18),可得PCEHV的计算公式如下:
(19)
则异质交通流中智能网联车辆的换算系数PCEc为
(20)
基于式(16)、(20)及2.2节中的参数设定值,可得如图7所示网联车辆渗透率、车队规模与PCE的关系。
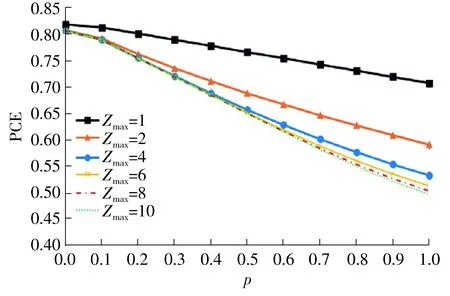
图7 不同网联车辆渗透率下车队规模对PCE的影响
Fig.7 PCE versus platoon size at different penetration rates of connected vehicles
由图7可以看出:车辆换算系数PCE随着网联车辆渗透率增大而逐渐减小,且网联车队规模越大,PCE减小越多;但当网联车队规模大于4时,PCE减小的趋势不再明显。PCE的变化与通行能力成反比,从图中也可以看出,车队组织模式能够进一步减小PCE,网联车辆渗透率增大对于道路通行能力的提升有积极作用;另外,对于混有网联车队的交通流,PCE更易计算和获得,这有利于基于交通供给和需求对每一个车队进行有效的控制和管理。
4 结语
文中对高速公路基本路段混有网联车辆的交通流进行了解析表达,主要工作如下:
(1)针对混有网联车队的异质交通流,建立了能够准确描述交通流中4种跟驰行为模式(RV、CRV1、CRV2、CACC)的车辆在空间随机分布的逻辑解析与数学表达。
(2)推导了混有网联车队的异质交通流的三角形基本图模型,并参考已有文献中对车联网环境下微观驾驶行为特性的研究成果,进行了网联车辆渗透率p和网联车队最大规模Zmax对通行能力的敏感性分析。研究结果表明,渗透率p越高、网联车队规模Zmax越大,越有利于交通流最大通行能力的提升,且渗透率越高,提升效果越明显;但是,比较不同网联车队规模对通行能力的提升效果发现,当车队规模大于4后,车队规模继续增加对通行能力的提升效果明显减弱。
(3)提出了混有网联车队的异质交通流车辆换算系数PCE的计算方法,并分析了网联车辆渗透率p和车队最大规模Zmax对PCE的影响。结果表明,不同p和Zmax下的PCE计算结果能够很好地反映网联车渗透率和网联车队最大规模对通行能力的影响。
后续工作中,将针对高速公路分、合流区和交织区等非基本路段,以及网联车辆渗透率、车队规模限制对异质交通流的影响等开展进一步研究。随着我国车联网技术测试和网联车辆道路实测的逐步展开,基于智能网联环境下新型混合交通流实测数据进行微观跟驰模型标定,进而分析相关参数对智能网联环境下新型混合交通流宏观演化和交通安全的影响将可能是未来的研究方向。
