乘用车与两轮车事故特征分析和目标识别因素研究
2020-03-21张立存苗强耿冬冬
张立存 苗强 耿冬冬
(沃尔沃汽车技术(上海)有限公司,上海 201800)
主题词:两轮车事故 中国交通事故深入研究 自动紧急制动 视场角
1 前言
根据中国交通事故深入研究(China In-Depth Acci⁃dent Study,CIDAS)的统计结果[1],2011~2017 年,乘用车与两轮车事故占所有交通事故数量的57.6%,成为我国数量最高的交通事故形态。自动紧急制动(Automatic Emergency Braking,AEB)系统可大幅降低汽车碰撞事故的发生概率[2],而如何避免与两轮车,尤其是电动两轮车的碰撞将成为下一代AEB系统开发的重要内容。
事故场景[3]是汽车功能安全开发的前提和功能验证的基础。国外针对乘用车与两轮车事故开展了诸多研究:FP7 AsPeCSS(Assessment methodologies for forward looking integrated Pedestrian and further extension to Cyclist Safety Systems)项目研究了英国乘用车与两轮车事故特征,发现汽车与自行车同向及汽车转向时事故较多[4];CATS(Cyclist-AEB Testing System)项目以CARE(Community database on Accidents on the Roads in Europe)数据库为基础,提取出10 种典型事故场景[5]。由于各国交通状况存在差异,我国研究人员也针对中国乘用车与两轮车事故进行了研究:陈强[6]等基于2011~2015 年的CIDAS 数据,对乘用车与两轮车事故特征进行了总结;江丽君[7]等基于2011~2014年的CIDAS数据,依据人员重伤比例确定了两轮车典型场景分布;胡林[8]等基于逻辑回归方法,得出质量比、保险杠高度、保险杠宽度与乘员损伤程度的关系。
本文对CIDAS真实事故总体信息及相关要素进行分析,并基于事故分类方法,确定事故类型的分布,提取出事故率最高的5种事故类型,重点分析乘用车与两轮车事故的速度分布特征,并建立碰撞时间(Time to Collision,TTC)为1 s时两轮车与乘用车相对位置分布图,研究该时刻视场角(Field-of-View,FOV)变化所能覆盖的事故数量,为用于两轮车事故防护的乘用车安全系统开发提供参考,并为该类安全系统功能测试提供测试场景。
2 研究方法
2.1 数据来源及数据处理方法
CIDAS 综合考虑气候、地理地貌、交通特点等因素,从2011年起,主要采集沈阳、北京、威海、成都、广州5 个城市的交通事故详细信息,每年采集接近800 个事故数据样本,为汽车安全领域研究人员提供了重要数据支持。
本 文基于2016 年4 月~2018 年9 月期间 的CIDAS数据进行乘用车对两轮车事故(本文简称两轮车事故)筛选,筛选条件为:事故参与的乘用车为轿车(Sedan)、SUV 以及MPV;至少有1 人受伤;事故参与的两轮车为普通自行车(完全由人力驱动的两轮车)、电动自行车(由电动机驱动的两轮车)、摩托车(通过内燃机驱动的两轮车)。基于以上条件,本文从CIDAS 数据库中共提取出745 起事故。同时,由于CIDAS 事故数据种类繁多,不利于有效分析和总结,因此本文将CIDAS事故数据类型通过自行开发的程序转换为约定的事故类型描述[9]。
2.2 事故场景分类
本文采用现有约定事故分类方法,部分事故形态如表1 所示,设置左转、右转的类型代号分别为LT(Left Turn)、RT(Right Turn),骑行人与乘用车同向行驶、对向行驶的类型代号分别为SD(Same Direction)、OD(Oppo⁃site Direction),骑行人从右侧横穿的类型代号为SCPcr(Straight Crossing Path,cyclist from right)。

表1 部分事故类型描述
3 两轮车事故特征分析
3.1 两轮车事故总体信息
提取的两轮车事故中,电动车事故、摩托车事故和普通自行车事故占比分别为53.76%、38.04%和8.20%。事故发生时间的总体分布如图1所示,为统计方便,0时代表时间段0:00~1:00,其他时间段依次类推。大多数两轮车事故发生于白天,8:00~20:00时间段内发生的事故占比为77.81%,其中,发生事故最多的时间段是5:00~7:00,其次是11:00~13:00,原因可能为此时间段道路车流量较大,因此事故发生率较高;22:00~6:00 时间段内发生事故的比例仅占4.68%,符合出行规律。
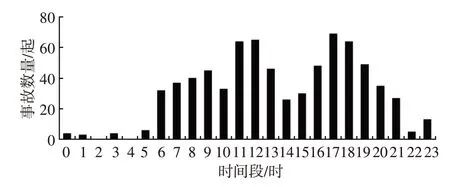
图1 事故发生时间的总体分布
3.2 两轮车事故类型分布及其速度特征
本文将745起事故按事故类型分类,如图2所示,其中Oncoming为对面来车场景。由图2可知,前9种事故类型共597 起,占80.13%,其中骑行人从左侧横穿(Straight Crossing Path,cyclist from left,SCPcl)事故数量最多。

图2 两轮车事故的整体分布
3 种类型的两轮车构成的事故场景分布情况如图3 所示,由图3 可知,普通自行车、电动自行车、摩托车发生事故最多的类型分别为SD、SCPcl 和LT/OD 类型。从整体上看,3 种两轮车发生频率较高的事故类型差别较小,且各车型在不同事故类型中的分布趋势类似。
本文重点研究事故率最高的5 种事故类型的速度特征。如图4所示,自行车、电动自行车、摩托车与乘用车碰撞前的平均速度分别为10~15 km/h、20~25 km/h和30~35 km/h。3种类型两轮车在碰撞时刻的速度与碰撞前的速度几乎相同,可知两轮车驾乘人在整个事故过程中几乎未进行制动。

图3 3种两轮车事故的场景分布
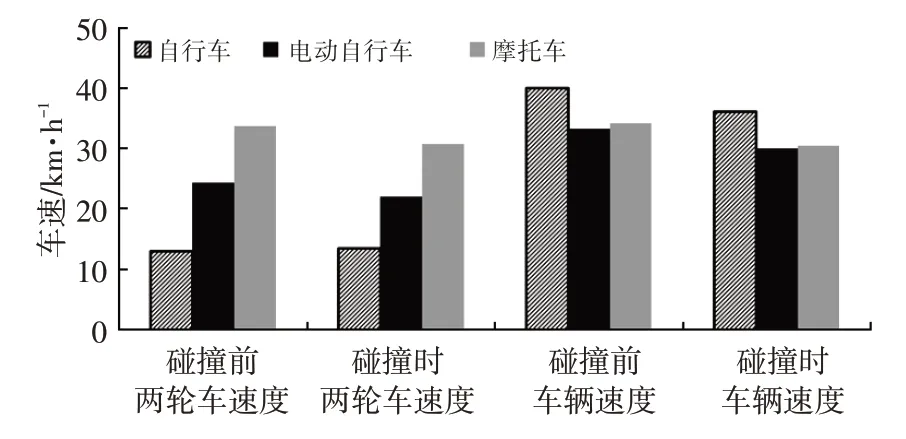
图4 两轮车与车辆碰撞前后速度分布
而乘用车与自行车、电动自行车、摩托车的碰撞前平均速度分别为35~40 km/h、30~35 km/h 和33~45 km/h。总体上仅有31%的乘用车存在减速情况,且电动自行车较多是符合中国道路交通现状的特征,而目前的AEB系统缺乏准确识别电动自行车的能力,所以有必要开发一种除摩托车和普通自行车之外,还能识别电动自行车的AEB 系统。基于上述分析,该AEB 系统的最小触发速度为10 km/h,在20~40 km/h 范围内可发挥最大制动性能,相对速度为30 km/h 以下可完全避免乘用车与两轮车的碰撞。
4 两轮车事故发生前1 s相对位置研究
高级驾驶辅助系统(Advanced Driver Assisted System,ADAS)[10]的环境感知配置和能力直接影响AEB系统的可靠性与准确性。FOV 是AEB 系统的重要参数,以乘用车和两轮车碰撞时间为1 s 时两者相对位置为依据,本文研究不同FOV所覆盖的碰撞事故数量,统计所有事故碰撞中两轮车相对于乘用车的角度,当FOV分别为60°、80°和100°时,AEB 系统能覆盖的事故数量如图5所示。因两轮车碰撞前速度均较低,且与乘用车的纵向距离大多小于30 m,处于目前已量产的智能驾驶辅助系统所用的前向摄像头或毫米波雷达的监测范围内。因此,可不考虑本文所研究事故场景的纵向距离因素。
当FOV 分别设为60°、80°和100°时,分别有55.84%、71.81%、75.97%的两轮车处于传感器视场角范围内。因此,增大FOV,尤其是前向监测摄像头角度,对于感知更多存在碰撞风险的两轮车事故具有明显的正向效果。另一方面,总会存在部分事故场景无法覆盖,原因是较多事故发生于两轮车与乘用车同向车道行驶,且乘用车右转向时,即RT-SD场景,此时与乘用车同向行驶的两轮车较难被检测,该场景在总事故率中排第5位。未来,安装于乘用车左前和右前的角雷达可弥补前向传感器在乘用车侧面的感知能力。
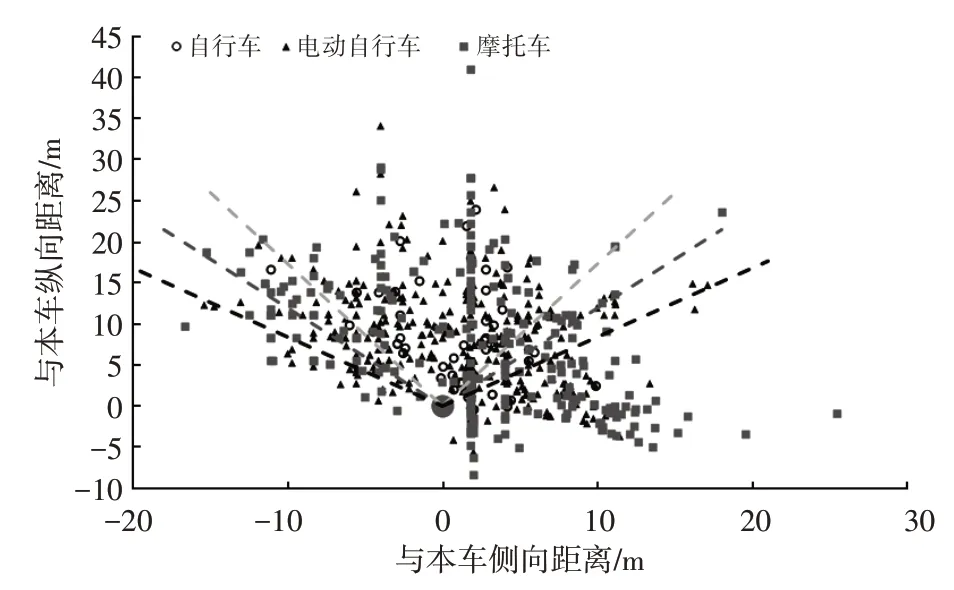
图5 碰撞时间为1 s时两轮车与乘用车位置分布
5 AEB系统对电动自行车识别因素分析
对于主流ADAS中AEB的控制逻辑,不同目标类型会触发不同的AEB 决策表现。目前市面上所有ADAS均不支持中国电动自行车的分类,基于此,本文从实际ADAS道路采集数据着手,深入分析电动自行车在当前成熟的ADAS系统中的分类结果以及其影响因素。
本文分析的道路数据来源于2017 年河北省石家庄市附近一段晴朗白天记录的视频,数据中共有611帧包含电动自行车,经过人工配对和分析,其中分别有258 帧、158 帧、61 帧、4 帧被识别为摩托车、行人、自行车和乘用车,而剩余的则没有被识别为任何类型(漏检)。为进一步研究对两轮电动自行车的感知,本文深入分析导致不同识别结果的主要因素,包括乘用车行驶速度和两轮车行驶方向。
本文主要探究两轮车的3个行驶方向,即与乘用车同向、与乘用车反向、横穿乘用车行驶路径。对基于数据提取的特征进行分类分析,结果如图6 所示,与乘用车同向的场景占据所有场景的50%,1/3 场景与乘用车反向,其余的为横穿或类似于横穿情况。与乘用车同向场景总体分类结果和与乘用车反向场景类似,但在横穿场景中,被误识别为行人的场景最多,同样有大量结果没有被分类。
因此,可认为与乘用车同方向行驶或反方向行驶的电动自行车更容易被识别为摩托车,而对于横穿的场景,被识别为摩托车或者自行车的概率较小。
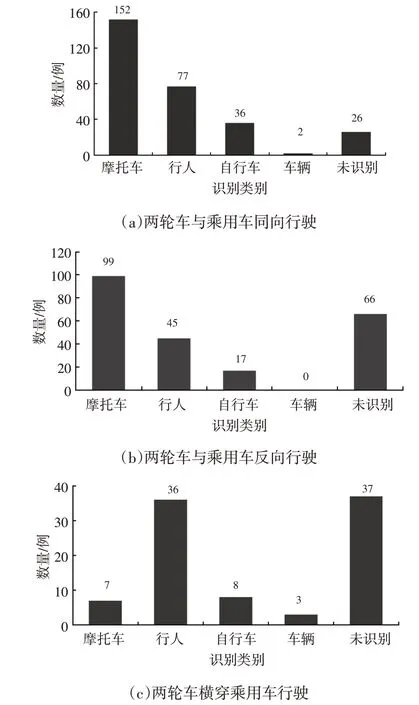
图6 不同行驶方向识别结果
6 结束语
本文在中国交通事故深入研究数据库中筛选乘用车与两轮车事故,深入分析场景类型、时间、速度等因素,建立了事故前1 s两轮车与乘用车相对位置分布图,研究了AEB系统视场角对两轮车检测效果的影响并分析了AEB系统对电动自行车识别的影响因素。基于特有的分类方法分析得出事故率最高的5种类型,提取了两轮车事故中的典型速度特征,论证了引入一种可支持电动自行车识别的AEB系统的重要性及功能定义需满足的速度区间。分析得到影响电动自行车识别结果的主要因素为电动自行车相对于乘用车的行驶方向,同向和反向行驶的电动自行车更容易被识别为摩托车,而横穿行驶的电动自行车容易漏检或被分类为行人。
