喷射机械手作业轨迹控制策略研究
2020-03-14张淑君张卫国
蔡 林,张淑君,张卫国,冯 敏
(1. 徐州徐工随车起重机有限公司,江苏 徐州 221004;2. 徐州徐工施维英机械有限公司,江苏 徐州 221004)
混凝土和砂浆喷射工艺广泛应用于隧道、地铁、巷道、水利设施和边坡的支护施工。喷浆机械手可替代人工持喷头喷射,提高喷浆作业效率和质量[1]。喷射机械手有回转、变幅、伸缩等较多的关节和自由度,运动灵活,动作频繁。操作手控制喷头运动需要组合操作多个自由度,操作复杂,影响作业效率。喷射机械手的机构为方便往复喷射施工,也往往更为复杂。图1所示。

图1 HPR08型喷射机械手
若通过运动学轨迹规划,控制喷头进行前后、左右、上下、和机械臂回转,八个自由度的运动。则可以大幅降低操作难度,提高喷浆作业效率和喷头定位精度,并可降低机械手为适应往复喷浆作业的机构复杂程度。
1 喷射机械手的运动学与逆运动学分析
喷射机械手空间坐标系如图2所示。以回转中心为基础坐标系原点,臂架各绞点和端部为动坐标系原点。采用D-H变换,将动坐标转换为基础坐标,计算出各个绞点,端部喷头等部位相对于回转中心的坐标。坐标转换参数表1所示。
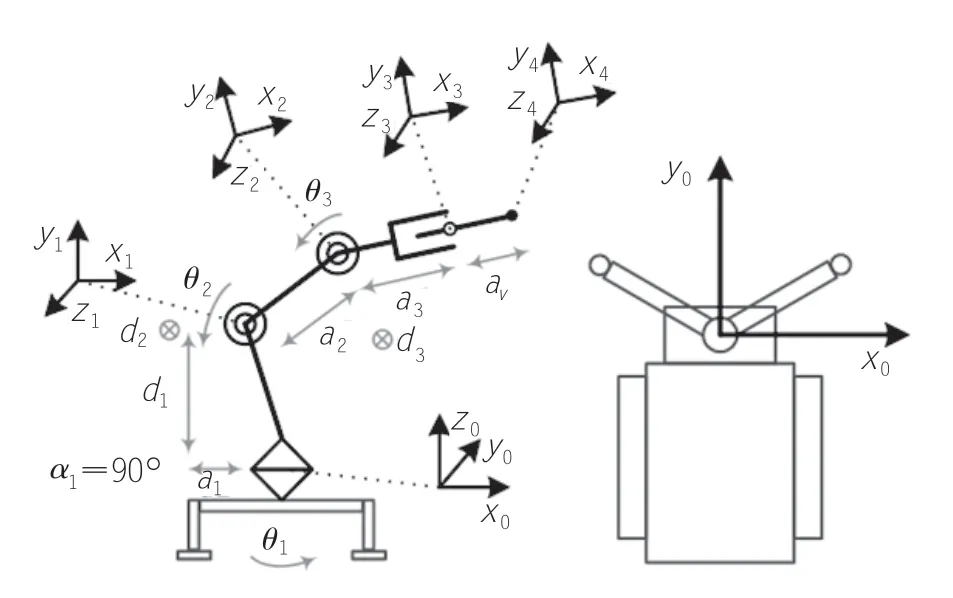
图2 喷射机械手空间坐标系
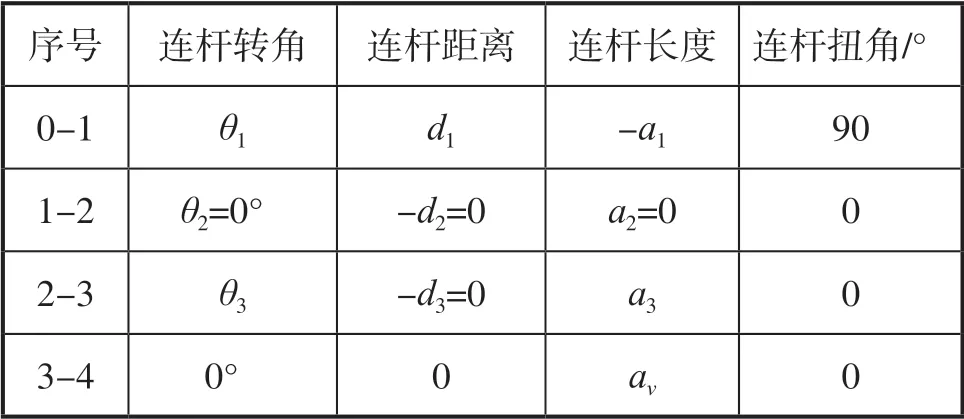
表1 坐标转换参数
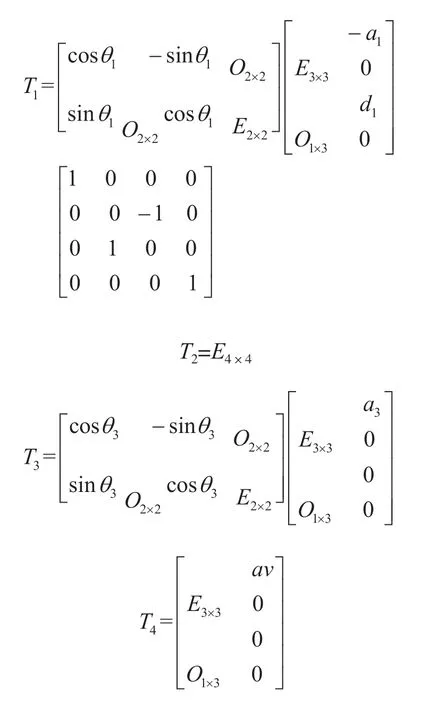
每个关节的坐标变换矩阵为:
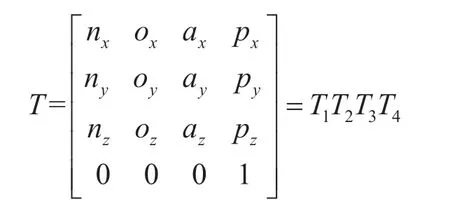
喷头到基础坐标系的坐标变换矩阵T为:
对坐标变换求逆,并取等式两侧矩阵中对应元素相等关系得:

进一步求出回转角度θ1、变幅角度θ3,与伸臂长度av等关节参数与喷头坐标的关系式:

以操作者第1人称视角方向为参照,操作喷头上下,前后,左右运动。操作者视角随机械臂回转而旋转。当操作者操作电控手柄进行喷头的运动控制时,手柄操作角度的大小对应该自由度运动速度的快慢。
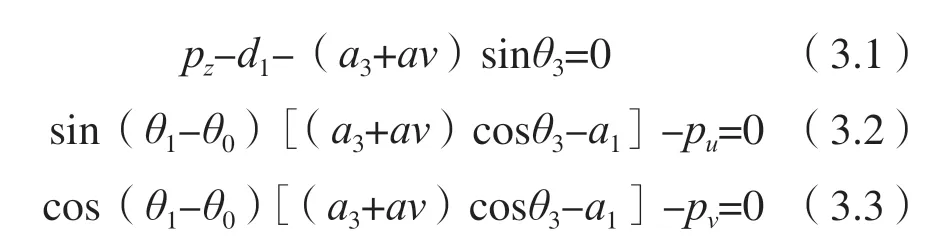
如图3所示,机械臂回转初始角度为θ10,臂架伸出方向在水平面上的投影与操作者视角的夹角为θ50,喷头初始坐标为(pxf,pxf),令θ0=θ10+θ50。当喷头分别以左右和前后方向运动时。臂架通过,回转、伸缩、变幅运动,保证喷头沿pu和pv运动。则得到臂架关节域到直角坐标系域的关系如式(3)所示。
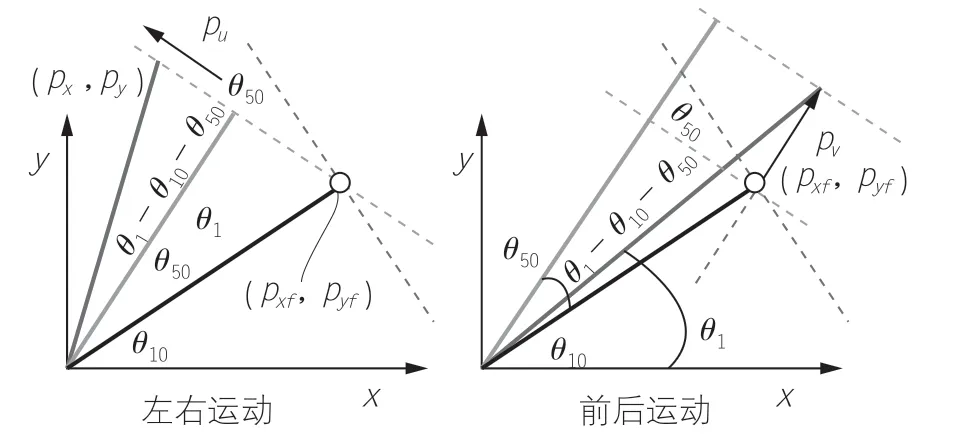
图3 喷头左右和前后方向运动时在XOY平面投影
上下、左右、前后方向的运动速度分别为,z=dpz/d,u=dpu/dt,v=dpv/dt,回转、变幅、伸缩关节的运动速度分别为,g=dθ1/dt,s=dθ3/dt,l=dav/dt。
式(3)两侧对时间t求微分,并联立方程解得关节运动速度和喷头在基础坐标系中运动速度的关系:
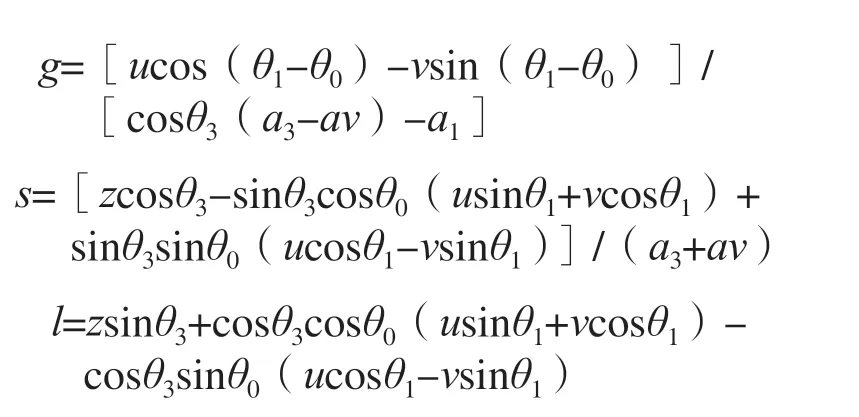
其物理意义为保证喷头按照给定速度和给定目标轨迹运动,则回转、变幅、伸缩3个关节变量的速度配合值。
喷头按照目标速度和轨迹运动时会产生偏差,需要对偏差进行补偿并修正各个关节的给定速度。机械臂在基础坐标系中按照上下、左右、前后自由度的运动位移为:
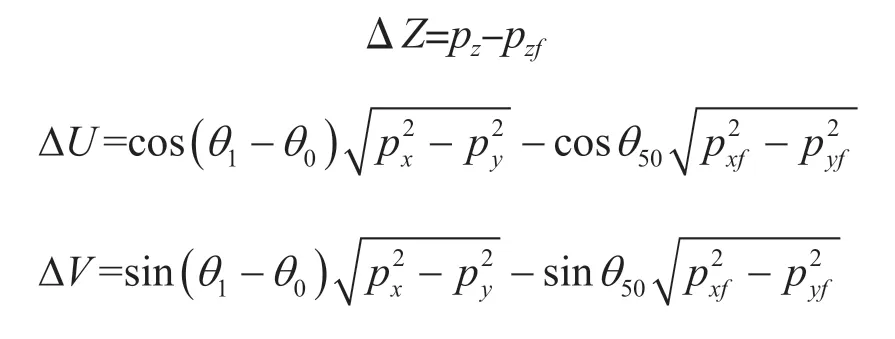
机械臂在基础坐标系中按照上下、左右、前后自由度的运动位移应正比于给定自由度方向上的运动速度,即ΔZ/ΔU/ΔV=z/u/v。否则,应对关节速度进行相应的修正。
2 作业轨迹控制方法
智能轨迹控制技术路线为,基于关节运动速度控制和位置修正控制策略,在基础坐标系内对喷头运动轨迹控制与规划;在关节参数域内进行喷头的速度控制。电控手柄的输入和预先规划的轨迹首先通过基础坐标系速度与关节域运动速度转变得出关节速度目标值。控制器输出PWM驱动信号控制电比例多路阀的开口和流量,进而控制各关节动作。同时校验当前运动轨迹偏差的约束条件,实时修正关节速度目标值。作业轨迹控制系统框图如图4所示。
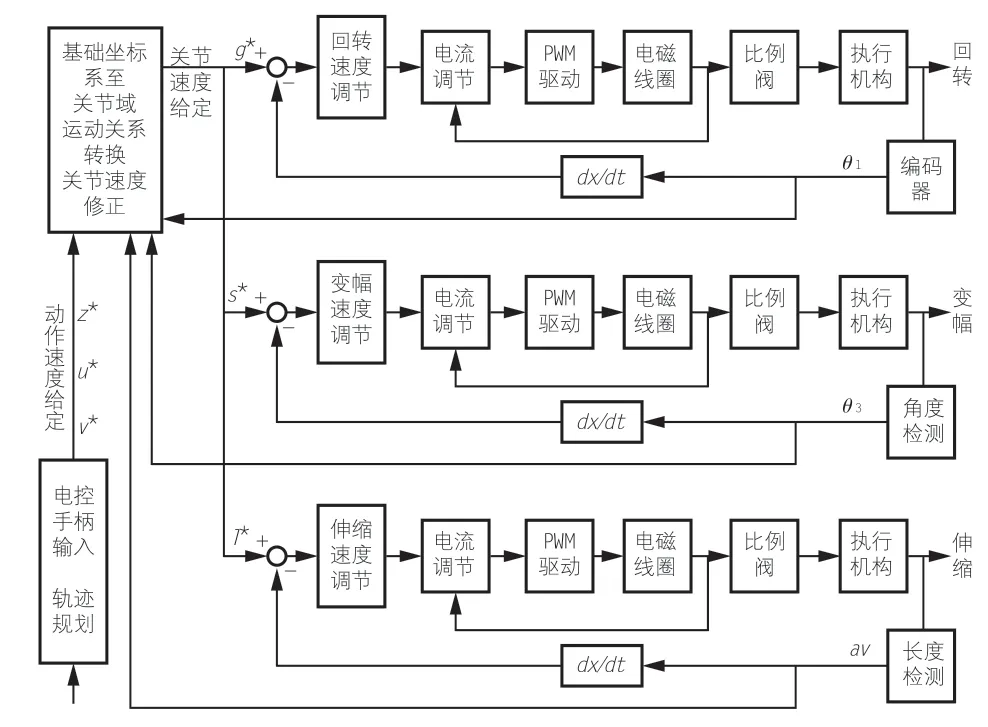
图4 作业轨迹控制系统框图
机械臂的转台配置有编码器,臂架上配置有长角传感器,用于检测机械臂的回转、变幅角度和伸臂长度。控制程序中,通过对所采集回转、变幅角度和伸臂长度求差分即可得出回转、变幅、和伸臂速度,实现关节运动速度的闭环调节。控制器可采集比例线圈电流,用以修正线圈电阻和系统供电电压变化导致的电磁阀线圈电流误差。
将控制算法应用于某工程样机,并对样机进行上下、左右、前后的直线轨迹运行测试。应用该控制策略喷头直线运动误差小于等于±200mm。满足喷射混凝土工艺要求。
3 结束语
通过对喷射机械手运动学分析,将喷头在基础坐标系的运动轨迹控制转换为关节域内的速度控制。实现了直接对喷头进行前后、左右、上下方向上的运动控制。将该算法应用于机构较为简单的喷射机械臂,实现了直线往复喷射施工要求。该控制方法降低了操作难度,提高了喷浆作业效率和喷头定位精度。同时在满足施工工艺要求的前提下,可以简化喷射机械臂的机构。
