基于Carsim仿真的路面平整度检测数据系统的设计
2019-11-27舒兰潘冰洛布顿珠
舒兰 潘冰 洛布顿珠

【摘 要】针对路面质量检测中的路面平整度问题,本文设计了一套路面平整度采集系统。硬件部分,开发了以STM32 F103ZET6开发板为核心,结合MPU6050加速度模块和LCD显示屏的单片机作为的信号采集模块;软件部分,用Carsim进行路面和车辆的模型建立,得到了不同路面国际平整度指数(International Roughness Index,IRI)和55 km/h车速状况下的车辆前进方向的加速度峰值,进行自回归分析后得出IRI值关于加速度功率谱密度均方根的回归方程。检验后根据回归方程编写程序,实现通过加速度传感器测得的数据计算出对应的IRI值的功能。
【关键词】路面检测;Carsim仿真;加速度;国际平整度指数IRI值
1.研究背景
近年来,随着我国交通运输行业的迅速发展,与此相关的道路检测与建设工程也变得尤为重要。在路面质量检验的诸多指标中,路面平整度是其中最重要的指标之一[1]。路面平整度关系到行車的安全、舒适以及路面所受冲击力的大小和使用寿命,不平整的路表面会增大行车阻力,并使车辆产生附加的振动作用。这种振动作用会造成行车颠簸,影响行车的速度和安全,影响驾驶的平稳和乘客的舒适性。为了客观定量分析路面平整度,世界银行提出采用IRI作为评价标准的建议。IRI是以四分之一车在速度为80km/h时的累积竖向位移值为IRI值,单位用m/km。
我国过去使用较多的仪器有三米直尺、连续式平整度仪等,这些仪器受长度和速度的限制,难以反映较高车速下路面较长波长的颠簸和起伏,存在测试效率低、机械配置庞大而笨重、测定精度差等问题。之后,与国外发展趋势相同,国内也逐渐重视起激光传感器技术。但国内激光平整度检测产品采用的激光位移传感器基本上是引进的,价格较为昂贵。
2.设计思路
首先基于Carsim仿真软件,建立了加速度与平整度的关联模型,其次对系统设备安装位置进行确认,然后对整个路面平整度检测系统的软硬件进行设计,最后通过实验进行验证。
2.1基于Carsim仿真的关联模型的建立
应用Carsim软件建立路面和车辆仿真模型,并进行了试验验证,通过所建立的仿真模型得到了不同等级路面的加速度数据,然后利用Matlab对仿真数据进行了回归分析,得到了加速度功率谱密度均方根与IRI值的回归方程。
2.1.1 Carsim标准三维路面模型的建立与验证
国标GB/T7031-2005将道路划分为8种等级[2],本项目采用基于路面功率谱密度(Power Spectral Density,PSD)函数的方法对8种标准等级路面进行仿真模拟;另外,获取标准等级路面时域模型时,采用傅里叶逆变换法[3](Inverse Fast Fourier Transform,IFFT)。本文采用基于PSD离散采样的IFFT法对标准等级路面进行仿真模拟,获得了GB/T7031-2005规定的8种标准等级路面的二维路面不平度数据。
Carsim三维仿真道路模型由道路水平线形文件、道路纵断面线形文件和道路不平度文件组成。通过利用Matlab运行相应函数把处理过的二维路面不平度数据自动生成Carsim道路模型文件。为了验证所建路面的准确性采用Welch法对模拟的路面信号进行了功率谱密度的估计[4]。部分验证结果如图1所示,其仿真得到的功率谱密度与标准功率谱密度曲线有较高的吻合度,因此验证了所建Carsim三维虚拟路面的准确性。
2.1.2 Carsim车辆仿真模型的建立与验证
在Carsim中,整车分为车体、转向、轮胎、悬架、制动系、传动等子系统,在对上述子系统设置参数后,利用Carsim软件中的车辆模型求解器进行运算,便可完成车辆建模。
为验证所建车辆模型的准确性,以55km/h的车速在某A级道路上进行了实车试验。采用车载式激光路面平整度仪LIPRES-I型,车上带有NI LabVIEW软件的微机、NI USB-6000数据采集卡、MEMSIC CXL25GP3三轴加速度传感器等,用于采集路面竖直方向上的加速度数据。Carsim仿真得到的加速度数据与实车试验得到的加速度数据有较高的吻合度,验证了所建车辆模型的可靠性,如图2所示。
2.1.3关联模型的建立与验证
依据1986年世界银行发45号文件中规定的路面IRI值的计算方法,通过编程计算出了标准等级路面分别对应的IRI值。之后在Carsim软件中运行所建立的三维虚拟路面模型和车辆模型,得到了在车速为55 km/h状况下不同路面的车辆竖直方向上的加速度数据。
将仿真得到的加速度数据及路面平整度数据导入Matlab中,计算得到加速度功率谱密度均方根值;经拟合得到IRI值与加速度功率谱密度的均方根值X的回归方程,且该模型的拟合优度R2为0.8923。回归方程如下:
式中,IRI值的单位为m/km,X为加速度功率谱密度均方根,单位为m/s2。
2.2系统安装设计
将路面平整度检测系统的加速度传感器安装在测试车内右前轮减振器缸体上[4]。检测时,选取测试车辆的行驶速度为55km/h,当试验车沿纵向行驶0.25米时,加速度传感器向开发板传送一个数据。
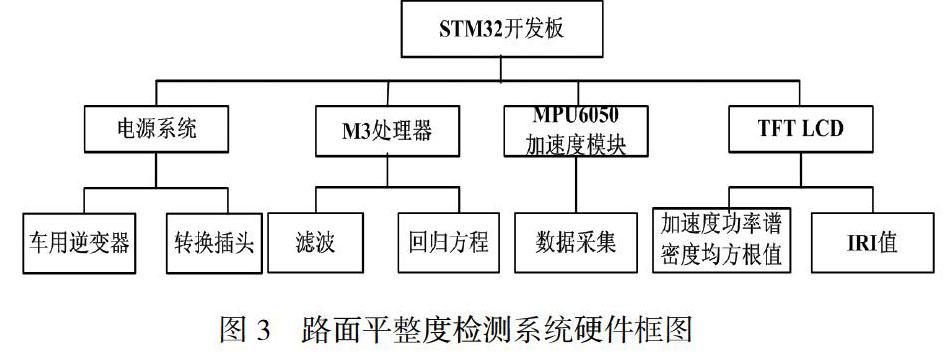
2.3系统硬件设计
路面平整度检测系统硬件框图如图3所示,该系统包括光电转码运算系统、MPU6050六轴加速度模块、电源系统等。
2.4系统软件设计
此系统以Keil uVeil5为开发环境,采用面向对象 C++程序设计语言进行开发,数据采集模块主要是对各个传感器初始化、待测区域起止位置的标定以及记录检测时现场环境数据。数据处理模块是软件系统的核心,主要通过单片机ADC模块将模拟信号转化为数字信号,并通过C语言程序运行计算IRI值。存储模块包括文件存储和数据库存储,其中各传感器的原始数据使用文本文件形式保存,现场检测信息、纵断面信息和国际平整度指数等用数据库来存储其具体数据。
2.5实验模拟
将组装好的设备按照安装设计方案固定在车辆上,选定镇江市的学府路为待测路段,并做好起点标记。将装有设备的车辆停至起点处,以55km/h的车速行驶。设备启动后,加速度传感器将测得的加速度数据传送给开发板数据处理模块,经算法程序处理得到IRI值。试验实物图如图4所示。
由试验可知,泓江西路段由本系统测出的IRI测量均值为2.328,该路段的IRI实际值[1]为2.726,平均相对误差为14.60%,体现了设计模型较高的准确性。
3、结论
与传统的人工测量或使用成本高的激光检测相比,本系统设计的基于加速度传感器的路面平整度检测系统可以实现低成本、高效率的道路平整度测量。本文模型尚未考虑不同车辆模型对Caisim仿真得到的回归方程结果的影响,今后需不断改进。
【参考文献】
[1]刘庆华,张文明,夏鹏飞.基于加速度传感器的路面不平度采集系统[J].江苏科技大学学报(自然科学版),2016,30(04):362-369.
[2]余志生.汽车理论[M].5版.北京:机械工业出版社,2018.
[3]王文超.稀疏快速傅里叶变换的应用方法研究[D].中国测绘科学研究院,2018.
[4]刘爽,刘云峰,董景新.基于功率谱密度的静电悬浮加速度计分辨率估计方法[J].仪表技术与传感器,2015,(10):30-34.
作者简介:舒兰(1998—),女,汉族,云南昆明人,江苏大学本科在读,交通运输方向。潘冰(1998—),男,汉族,浙江嘉兴人,江苏大学本科在读,车辆工程方向。洛布顿珠(1998—),男,藏族,西藏山南人,江苏大学本科在读,交通运输方向。
基金项目:本文系江苏大学第十八批大学生科研课题立项项目,项目编号:18A340
