无人机技术在建筑工程的应用与研究
2019-10-15朱东烽邓皓匀陈祺荣李名铠
朱东烽,邓皓匀,陈祺荣,李名铠
(1、广东筠诚建筑科技有限公司 广东云浮527400;2、广东精宏建设有限公司 广东云浮527400;3、华南理工大学土木与交通学院 广州510641)
0 引言
传统的工程计划无法将工程进度精确地表达,不利于在实际工程中做跟踪检查,当发生工程变更或施工环境变化时,往往无法做出实时应变处理。一旦缺少准确的施工总体目标,实际工程进度将无法进行精确管控,产生人力和资源分配不均等问题,导致施工资源浪费、工期延宕且管理效率低下。
无人机倾斜摄影技术,基于无人机高机动性、低空飞行以及低成本的优点,在建筑工程上能以更直观、可视化及自动化的方式来辅助建筑工程管理,对于提高工程管理效率、节省劳动力及提升工程质量,具有巨大的应用潜力。
在建筑工程相关方面,无人机倾斜摄影测量技术目前已广泛应用于地理测绘、城市规划建设和项目管理等方面[1-3]。利用无人机倾斜摄影技术对工程现场进行实时信息采集和数据留存,并通过建立三维实景模型,以直观的方式展示不同时间点的进度、质量与周边地理信息,不仅能让管理人员实时了解现场状况,更有助于对突发事件或者进度落后的项目做出即时且准确的处理。
本文基于建筑工程项目中无人机倾斜摄影技术的应用试验,对无人机倾斜摄影技术的可行性作出论证,并探究适用于建筑工程的无人机倾斜摄影技术应用方案。
1 无人机倾斜摄影技术
无人机倾斜摄影技术是指在飞行平台上搭载多台相机,同时从一个垂直角度以及其他若干个不同的倾斜角度采集影像的技术[4]。其打破了传统摄影只可以从一个垂直角度获取影像的局限性,能够更加真实地还原地形地物特征,把人们带入一个符合人眼视觉的真实直观的世界[5-6]。
成熟完备的无人机倾斜摄影测量系统的基本组成主要包括:无人飞行平台系统、飞行导航与控制系统、任务设备、数据传输系统、地面监控系统、综合保障系统与装置[7-9]。该技术的整体工作流程包括航线设定、空中作业、数据处理和数据分析四大部分,本文将对此技术路线在建筑工程应用中的无人机飞行参数设定优化及建模精度优化进行详述。
2 无人机倾斜摄影技术工程应用
如前文所述的技术路线,现将该技术应用于新兴县黄冈中学实际工程项目。考虑到无人机的航拍参数,以及天气条件、数据后处理和结构的复杂程度等因素,会对所生成模型的质量造成影响,故在应用试验中着重对无人机飞行参数设定方案进行比选分析,以期得到适合于建筑工程应用的技术方案。
在新兴县黄冈中学项目的两次航测中,通过设计不同飞行航线、不同高度及不同的相机倾角进行影像数据采集,将采集到的影像数据利用不同建模软件及平台:Altizure、Pix4D(Mapper、BIM),进行高精度三维建模。通过两次航测的无人机飞行参数、采集作业流程及不同软件作业流程的比较,对该项技术的成果进行分析讨论。
2.1 无人机飞行参数设计
在黄冈中学项目应用中,进行了两次航测试验,每一次试验具体开展了四次航测任务,分别为:场地试飞、全场地范围采集、单栋建筑自动采集及手动采集任务。以下将对两次航测试验的情况进行详述。
2.1.1 第一次航测概况
第一次航测大范围设计航向重叠度75%、旁向重叠度75%;单体部份航向重叠度75%、旁向重叠度85%;同时,对于建筑侧面纹理清晰程度低的部分,在重点建筑区域处,采用低空飞行及手动拍摄的方式以获取狭窄区域的影像,以及该建筑物侧向的纹理,但未设定固定的飞行高度与相机倾角;飞行高度设计各为120 m、100 m、70 m。
此次试验一共获取691 张影像数据,其中626 张用于三维建模。以下为航测的概况信息,航测参数设计如表1 所示。
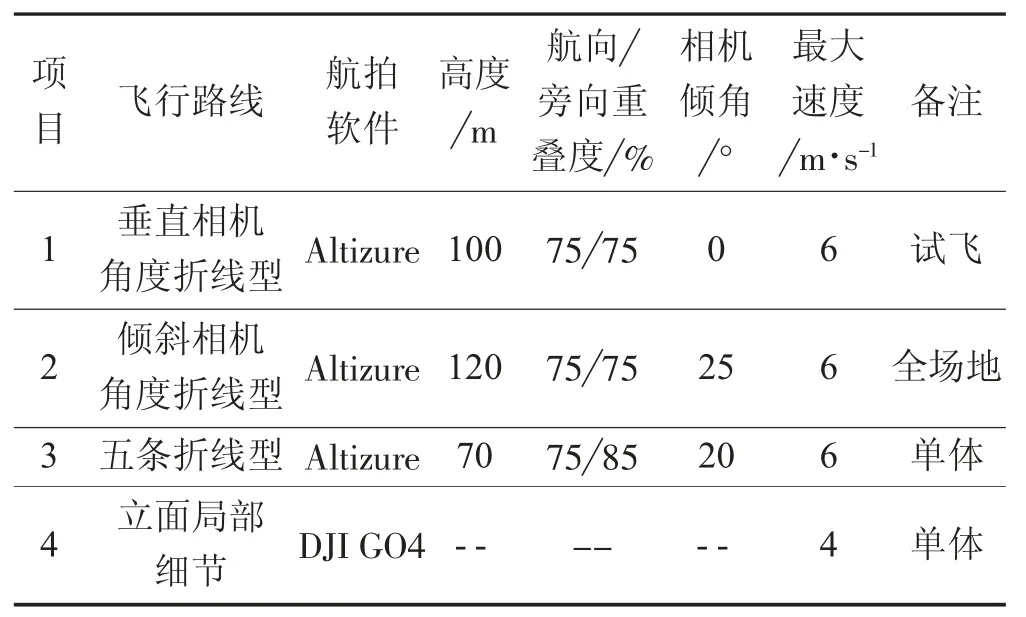
表1 第一次航摄参数汇总Tab.1 Summary of Parameters of 1st UAV Aerial Photography
⑴确认航拍范围-场地试飞:
采用Altizure 软件进行飞行航线规划工作。由于该项目尚处于建设过程中,在地图上未能显示,且项目周边可供参照的建筑物较少,故需先进行试飞来确定该项目在地图上所对应的范围。图1 展示了Altizure 软件上显示的新兴县黄冈中学项目的周边情况(图中浅绿色矩形处即为项目所在地)。

图1 Altizure 软件显示的项目周边地图Fig.1 The Surrounding Map of the Project Displayed by Altizure
⑵全场地范围航测:
通过场地试飞已大致确定了校区边界在地图上的位置,在Altizure 上调整项目的范围并开始进行拍摄。如前所述,在全场地航测中开展一次仅以一条垂直角度相机航线进行折线型组合的路线飞行,从而在一垂直方向获取大面积影像。
⑶单栋建筑:
单体部分选取正在拆除外脚手架的单体建筑进行拍摄。采用Altizure 软件和DJI GO 4 软件相结合的方式。利用Altizure 进行自动规划及拍照,执行建筑高度以上的数据采集工作。建筑的立面外侧采用DJI GO 4 软件,对不同高度采用直线、环形等模式进行手动拍摄。但该建筑内部有连廊连接,且对中部天井部位较难进行拍摄,因此在建筑中间天井部位建模效果不佳。
2.1.2 第二次航测概况
本文在第一次航测就已确定校区边界在地图上的位置,故在此基础上开展Altizure 软件的五条自动航线进行二次航测拍摄。
第二次航测设计航向重叠度75%、旁向重叠度55%,飞行高度设计为120 m、100 m、90 m、80 m(考虑建筑侧面建模清晰度,在后续逐渐降低飞行高度),相机倾角为25°。此次共开展五次不同角度全范围航测及五次重点建筑拍摄,共获取1 768 张影像数据,本次航拍参数的汇总记录如表2 所示。
⑴全场地大范围航测:
在全场地中共展开五次不同航线方式折线型路线飞行,详细内容如表2 所示,路线对应表中的项目1~5。第一条路线以垂直角度拍摄,第二条~第五条路线以同25°角进行不同方向采集。
⑵单栋建筑:
单栋建筑方面,结合应用不同软件Altizure 与DJI GO 4。采用Altizure 软件对单体小区域开展折线型路线采集。降低飞行高度至70 m,增加相机倾斜角度至30°;考虑到建筑周边有塔吊等设备,为避免无人机产生碰撞危险,利用DJI GO 4 对局部立面以及中间天井采用手动拍照,相机姿态如图2 所示。通过相机姿态可确认相机拍摄位置,便于后期对模型成果进行分析,以提升模型精细程度。
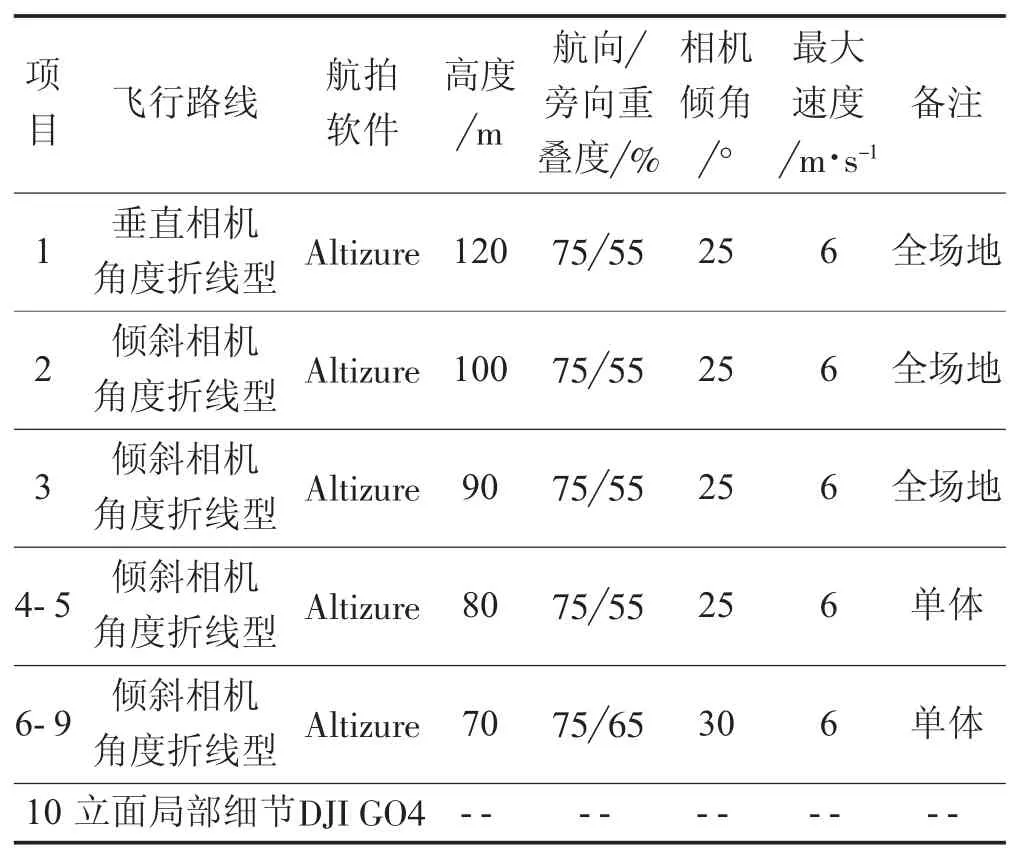
表2 第二次航摄参数汇总Tab.2 Summary of Parameters of 2nd UAV Aerial Photography

图2 手动拍摄相机姿态Fig.2 Camera Pose of Manual Shooting
2.2 数据采集作业流程
在规划飞行航线时,需对地理位置、范围大小与场地进行分析。故在航测开展前,按照黄冈中学项目的范围进行无人机航线规划,确保飞行质量与安全,同时避免飞行高度过低导致其与现场机具发生碰撞。
一般而言,无人机技术作业流程可分为两大部分:现场无人机数据采集,及影像后处理部份,具体流程如图3 所示。
依照此作业流程进行采集后,将两次采集所得数据导入至Pix4D(Mapper、BIM)与Altizure 三维实景建模平台进行数据处理。影像提取方式有两种:一是通过无人机将采集的影像传输至云端,可从移动设备上下载;二是通过数据卡获取。当飞行任务完成后,需在现场剔除不清晰或重叠度不足的影像并重新补足缺少的区块,以免模型出现破洞或“拉花”现象。
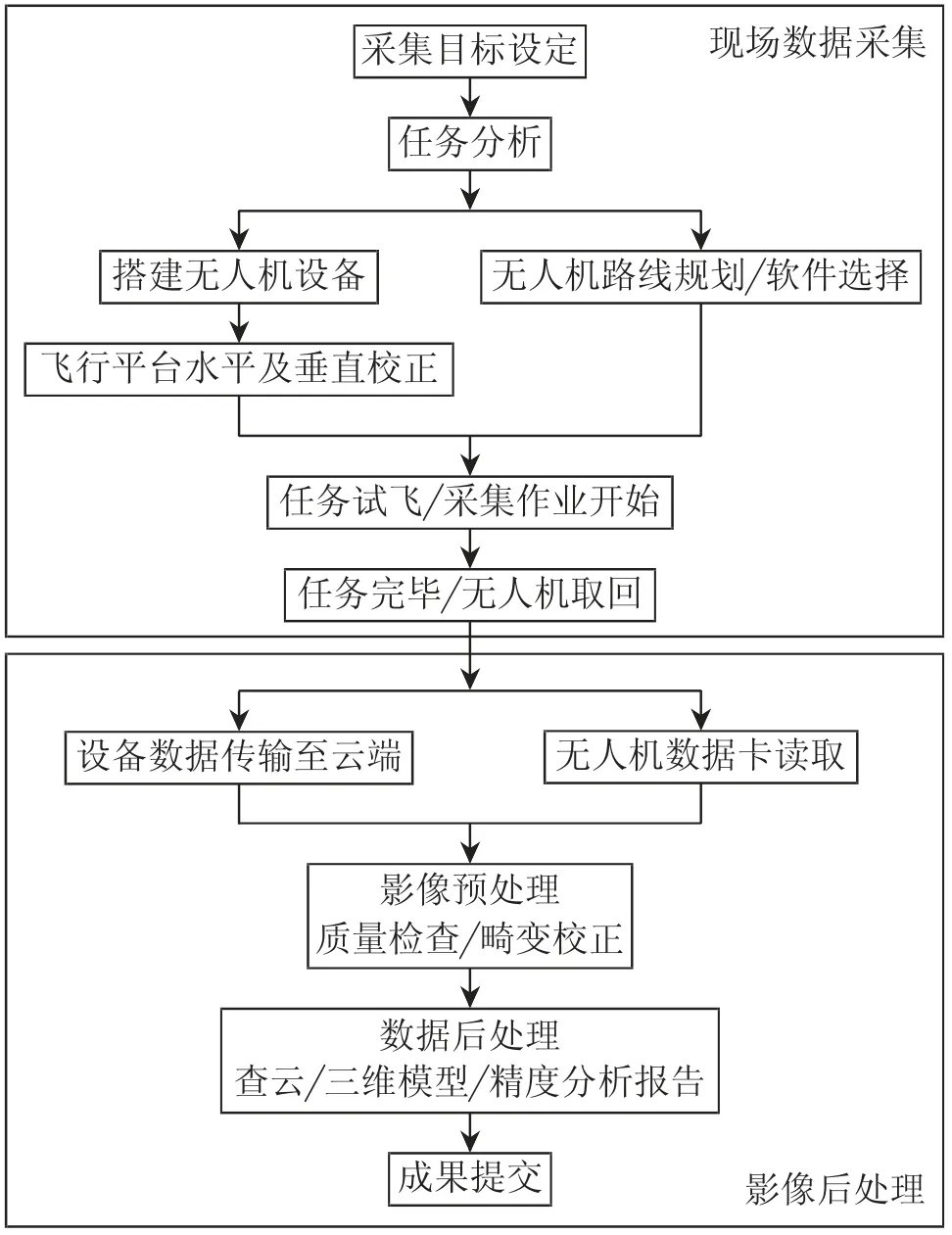
图3 无人机技术作业流程图Fig.3 Flow Chart of UAV Technology Workflow
2.3 影像数据后处理及结果对比
2.3.1 使用Pix4D 软件建模
选择两次试验的影像数据,导入Pix4D 软件进行处理,详细流程图如图4 所示。

图4 Pix4D 影像处理流程图Fig.4 Pix4D Image Processing Flow Chart
⑴Pix4DMapper 建模成果:
本文首先基于Pix4DMapper(试用版)软件,进行了两次航测的建模测试,以下是两次试验建模成果介绍。
第一次航测获取了626 张影像,在Pix4DMapper中所有影像数据皆被用于三维建模(见图5)。通过手动拍摄的影像生成的模型成果均出现絮状物的现象(如图5 红框所示,在建筑物上漂浮的物体);单体细部模型呈现部分,如图6 所示。
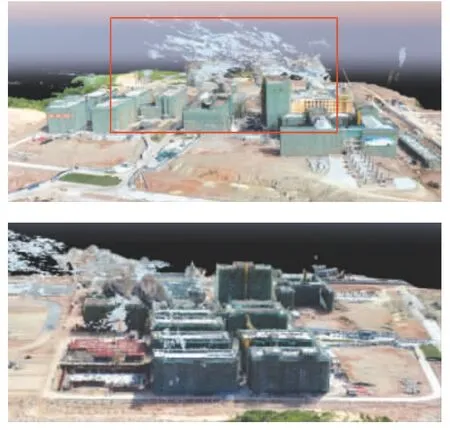
图5 第一次航拍模型图(基于Pix4DMapper)Fig.5 3D Model Diagram of 1st UAV Aerial Photography
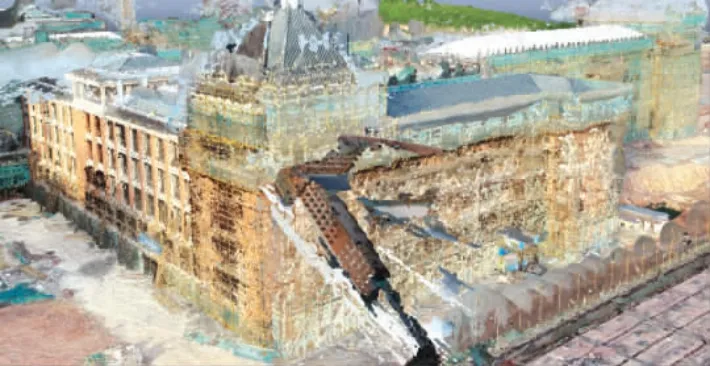
图6 第一次航拍单体细部模型图(基于Pix4DMapper)Fig.6 Detailed Model of Single Building of 1st UAV Aerial Photography
第二次航测获取了1768 张影像,剔除质量低、模糊不清影像,最终将1654 张影像导入在Pix4DMapper,该1654 张影像数据均被用于三维建模(见图7)。单体细部呈现部分,如图8 所示。
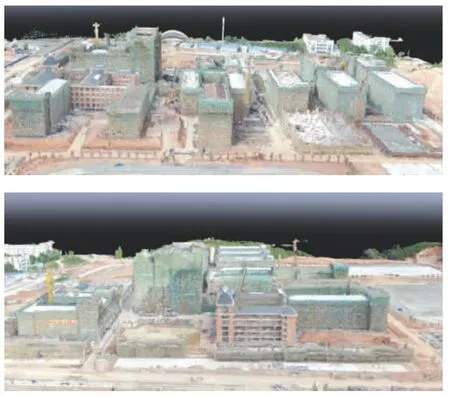
图7 第二次航拍模型图(基于Pix4DMapper)Fig.7 3D Model Diagram of 2nd UAV Aerial Photography

图8 第二次航拍单体细部模型图(基于Pix4DMapper)Fig.8 Detailed Model of Single Building of 2nd UAV Aerial Photography
⑵Pix4DBIM 建模成果:
基于Pix4DBIM(试用版),也进行了两次航测的建模测试。第一次航测获取了626 张影像,在Pix4DBIM 中数据仅518 张被用于三维建模(见图9)。
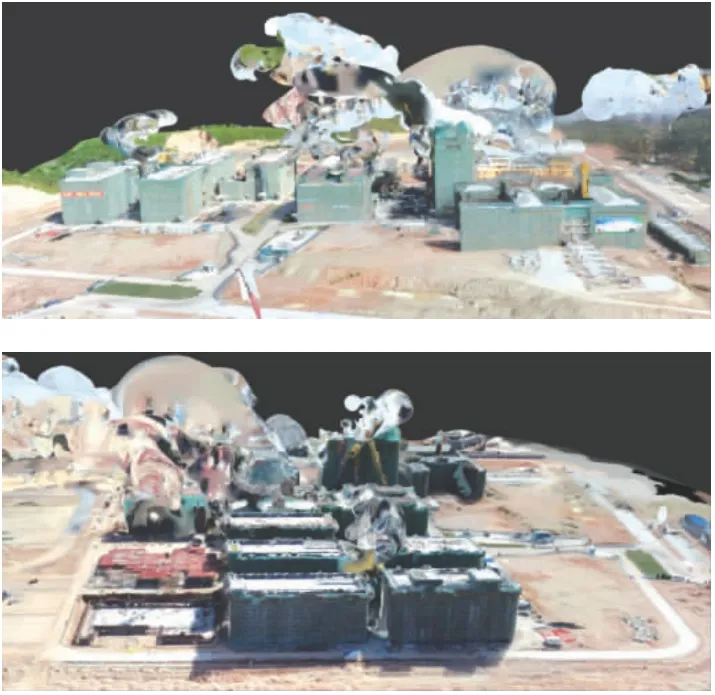
图9 第一次航拍模型图(基于Pix4DBIM)Fig.9 3D Model Diagram of 1st UAV Aerial Photography
单体细部呈现部分,如图10 所示。
第二次航测获取了1768 张影像,在Pix4DBIM 中数据仅1605 张被用于三维建模(见图11)。单体细部呈现部分,如图12 所示。

图10 第一次航拍单体细部模型图(基于Pix4DBIM)Fig.10 Detailed Model of Single Building of the 1st UAV Aerial Photography
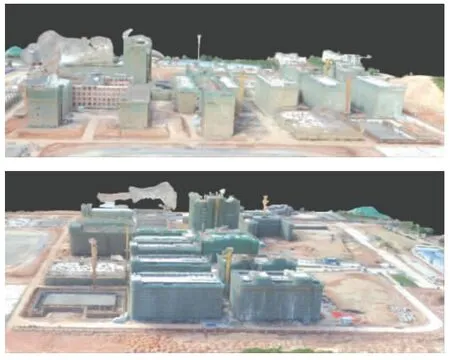
图11 第二次航拍模型图(基于Pix4DBIM)Fig.11 3D Model Diagram of 2nd UAV Aerial Photography
2.3.2 使用Altizure 三维实景建模
Altizure 以一键式自动化处理方式建模,流程简便。导入影像至Altizure 云端平台,系统自动以空中三角测量计算,做深度图像匹配优化点云来重建模型。最后可生成正摄图、细结分层(依不同精度)的三维模型,及谷歌地球三维模型等。

图12 第二次航拍单体细部模型图(基于Pix4DBIM)Fig.12 Detailed Model of Single Building of 2nd UAV Aerial Photography
两次航测数据的模型成果如下:
⑴第一次航拍:625 张照片用于三维建模(见图13)。单体细部呈现部分,如图14 所示。
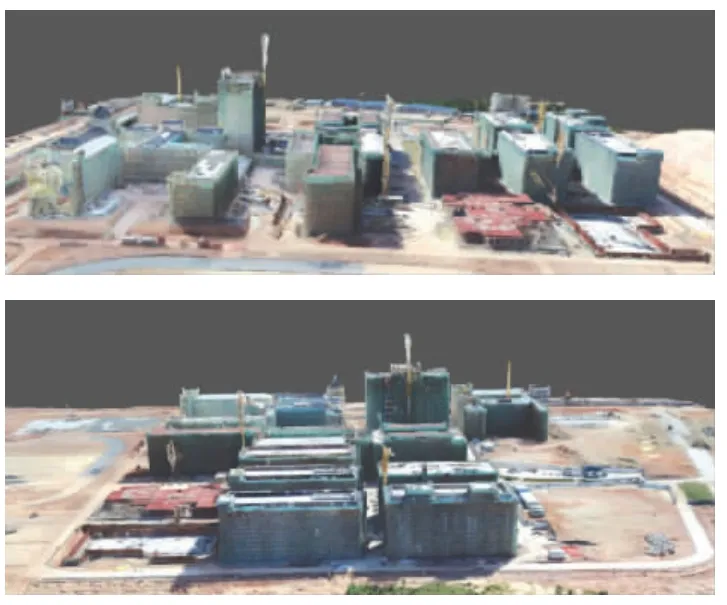
图13 第一次航拍模型图(使用Altizure)Fig.13 3D Model Diagram of 1st UAV Aerial Photography
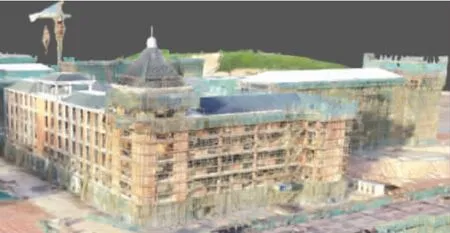
图14 第一次航拍单体细部模型图(使用Altizure)Fig.14 Detailed Model of Single Building of the 1st UAV Aerial Photography
⑵第二次航拍:1465 张照片用于三维建模(见图15)。单体细部呈现部分,如图16 所示。
2.4 航测结果讨论与分析
本文通过两次航摄的数据在不同影像处理平台(Pix4D、Altizure)进行三维实景建模。对结果进行分析讨论:
⑴第一次航测数据在Pix4D 平台处理所得的三维模型效果较差。在手动拍摄的影像生成的模型均出现絮状物与结块现象,模型成像不完整。通过调整航拍参数,并进行第二次航拍,其模型有了较好的成果,包括模型完整性及单体建筑的精细程度均有较大提高。
⑵无人机的三维模型成果出现孔洞或外观扭曲较少,据此可知在整体区域的影像具有足够的采集量与较高的影像重叠率。

图15 第二次航拍模型图(使用Altizure)Fig.15 3D Model Diagram of 2nd UAV Aerial Photography

图16 第二次航拍单体细部模型图(使用Altizure)Fig.16 Detailed Model of Single Building of the 2nd UAV Aerial Photography
⑶Pix4DBIM 进行数据导入时,存在影像并未完全上传及使用,导致生成的模型均有块状的情况。
⑷对于两次航拍任务,手动拍摄的影像建模均出现较多问题:由于过于依赖人工,当照片间关联度不足时,将影响照片间的匹配,导致出现“拉花”等建模质量问题。因此,拍摄过程中需保持镜头稳定性,尽量囊括更多信息,保持影像的连续性,减少相邻影像间的差异,提高影像匹配程度。
⑸通过对比Pix4D 与Altizure 影像处理平台的建模效果,由航拍成果可知Pix4DBIM 模型比Pix4DMapper、Altizure 效果差。Altizure 平台生成的三维模型质量更高,且较不易出现影像无法匹配的问题,因此更适用于倾斜摄影技术的三维实景模型的建构与展示。
3 结论
本文按照无人机倾斜摄影技术的技术路线,在考虑不同的飞行航线规划及飞行参数设定后,进行两次航测试验,不仅验证了无人机倾斜摄影技术应用于建筑工程项目的可行性,也得出了以下结论:
⑴该技术在实际项目应用前,须对项目地区地理信息及飞航管制区域进行调查。当实际工程项目周边未开发,将存在较难定位航测范围的问题;当需要试飞来确定测区的飞行范围时,需考虑无人机的续航能力。因此为实现高效采集作业,采集前合理规划方案至关重要。
⑵无人机倾斜摄影技术也存在空间限制的缺点。由于建设场地限制,只能在建筑外围拍摄而无法进入建筑内部。且无人机GPS 信号接收不佳、室内光线不足等问题影响影像清晰程度;当需要采集室内空间,应进一步尝试以不同技术,如三维扫描来解决该缺陷。
⑶为使模型精度提升而执行多条航线拍摄,但同时影像数量及建模时间也随之攀升。为解决此情况,后续的数据采集可通过提高无人机飞行高度,或降低航向/旁向重叠率以减少照片数量,总结航线设置、飞行高度、相机倾角、重叠率较优取值,在保证模型精度的同时也提高数据采集与建模效率。在进一步的应用研究中可对地面控制点布置来提高精度的航测方案进行研究。
