KCF算法在车辆目标跟踪上的参数配置研究
2019-10-08黄楠路锋王钦钊
黄楠 路锋 王钦钊

摘 要:对地面车辆目标的视觉跟踪任务首要是满足实时性,其次是在复杂背景下对目标跟踪的鲁棒性。KCF算法作为经典的判别式跟踪算法,凭借其高效的跟踪器学习效率,一直作为主流的实时跟踪算法之一。其中,搜索区域的大小选取在很大程度上决定了能否生成稳定的跟踪器,然而对于不同尺寸的车辆目标,其最优的搜索区域大小通常是不同的。为此,本文以标准数据集OTB2015作为车辆目标视频源,通过分辨率降采样来模拟多组不同尺寸的目标运动场景,论证在不同距离下实现最优车辆跟踪的KCF算法参数配置,为长距离的车辆跟踪任务提供了参数依据。
关键词:KCF算法;目标跟踪;地面目标
中图分类号:TP391 文献标识码:A
Abstract:The first requirement of vehicle target tracking is real-time,and the robustness of the tracker in complex environment is then followed.As a typical discriminative tracker,KCF has been brought into focus for its high computational speed,and the robustness of which is depended on the size of searching area to a great extent.However,the optimal sizes of searching area are usually different for vehicle targets,because the sizes of target vary greatly.Therefore,the paper uses benchmark OTB2015 as the video source,simulating multiple groups of moving target scenes of different sizes by reducing resolution of the videos.Experiment analysis is carried out on KCF tracker,which aims to demonstrate the optimal parameter configuration of KCF for vehicle tracking at different distances.
Keywords:KCF algorithm;target tracking;vehicle
1 引言(Introduction)
目标跟踪主要应用于智能交通、路况监控、精确制导、机器人等领域[1],其任务是根据给定的初始目标位置,在接下来的视频帧中,标定出目标的位置。目标跟踪尤其是地面目标,通常处于复杂的背景环境,如光强变化、目标旋转、背景杂波、背景遮挡等,这些都给目标跟踪任务带来巨大的挑战性。对于地面车辆目标而言,考虑到目标通常处于快速运动的状态,算法的实时性更是选择跟踪算法的重要依据。
跟踪算法大致上分为生成式和判别式两类,其中生成式算法的主要思想是对目标进行建模,利用模型与下一帧的图像的搜索区域进行配准,配准度最高的即为目标区域。常用的模型有马尔可夫模型(MRF)和混合高斯模型(GMM)。不过单纯的模型构建思想并没有对目标与背景信息加以区分,所以模型精确度很受背景杂波的影响,并且算法的速度普遍没有判别式算法块。判别式算法的主要思想是将目标跟踪问题当成分类问题加以解决[2],通过构建仿射变换、循环位移、窗口平移等[3-7]方法来构建目标负样本,进而通过对正负样本的学习得到分类器(跟踪器)。分类器的学习策略决定了跟踪器的稳定与否,由于分类问题可以利用机器学习加以解决,所以基于判别式方法的跟踪算法普遍比生成式方法更加精确。
经典判别式方法MOSSE由Bolme等人[3]提出,由于利用相关运算的思想,使得分类器的学习过程可以在傅立叶域上快速地实现,从而实现300帧以上的运算速度。后续Henriques等人[5]在MOSSE的基础上提出KCF,用循环矩阵代替MOSSE的放射变换来实现训练样本的密集采样,其示意图如图1所示。目标特征也从单通道灰度特征转变为多通道的HOG特征,使得跟踪器在维持100帧以上的计算速度的同时,具有在复杂环境下更为稳定的跟踪性能。
搜索区域相对于目标尺寸的大小比例(padding),在很大程度上决定了所采取的样本的合理性。复杂环境下行驶的车辆目标通常具有大范围的尺度变换,如何对不同尺寸的车辆目标选取不同的搜索区域以获得性能优异的跟踪器,对于复杂环境下的地面车辆跟踪任务而言是很重要的。为此,本文以不同距离下的车辆作为目标,进行了KCF算法最优padding配置的实验验证。
2 KCF算法(KCF algorithm)
KCF算法是一種基于核相关滤波器的目标跟踪算法,通过对采集图像块构建循环矩阵来表征对目标及其背景进行密集采样的样本,以此构造大量训练集。KCF算法使用基于岭回归的非线性预测进行训练学习得到滤波器(分类器),利用核函数计算候选区域与目标的近似程度,选取相似度最大的区域为新的跟踪目标,并进行下一帧的检测。岭回归具有封闭解,并且KCF算法利用循环矩阵的性质通过快速傅立叶变换提高了运算速度[5]。
3 实验验证(Experimental verification)
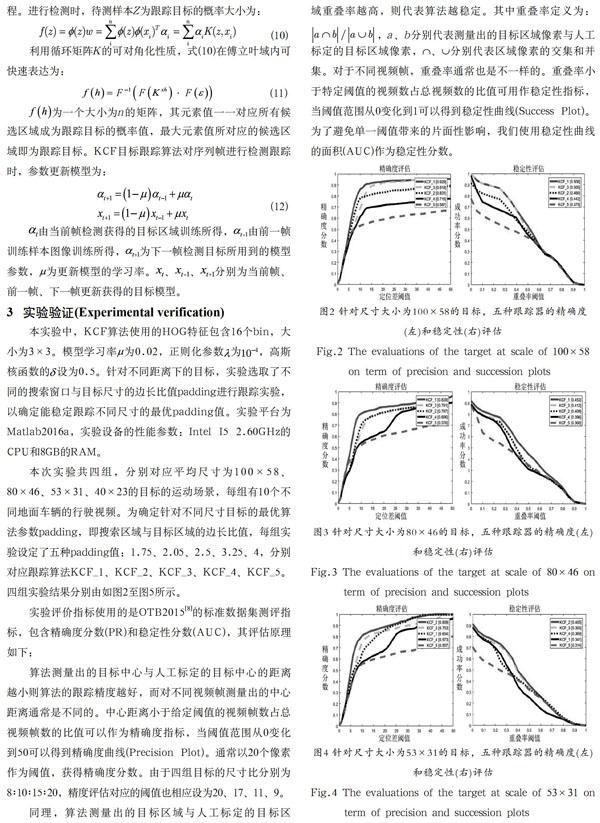
本实验中,KCF算法使用的HOG特征包含16个bin,大小为3×3。模型学习率为0.02,正则化参数为,高斯核函数的设为0.5。针对不同距离下的目标,实验选取了不同的搜索窗口与目标尺寸的边长比值padding进行跟踪实验,以确定能稳定跟踪不同尺寸的最优padding值。实验平台为Matlab2016a,实验设备的性能参数:Intel I5 2.60GHz的CPU和8GB的RAM。
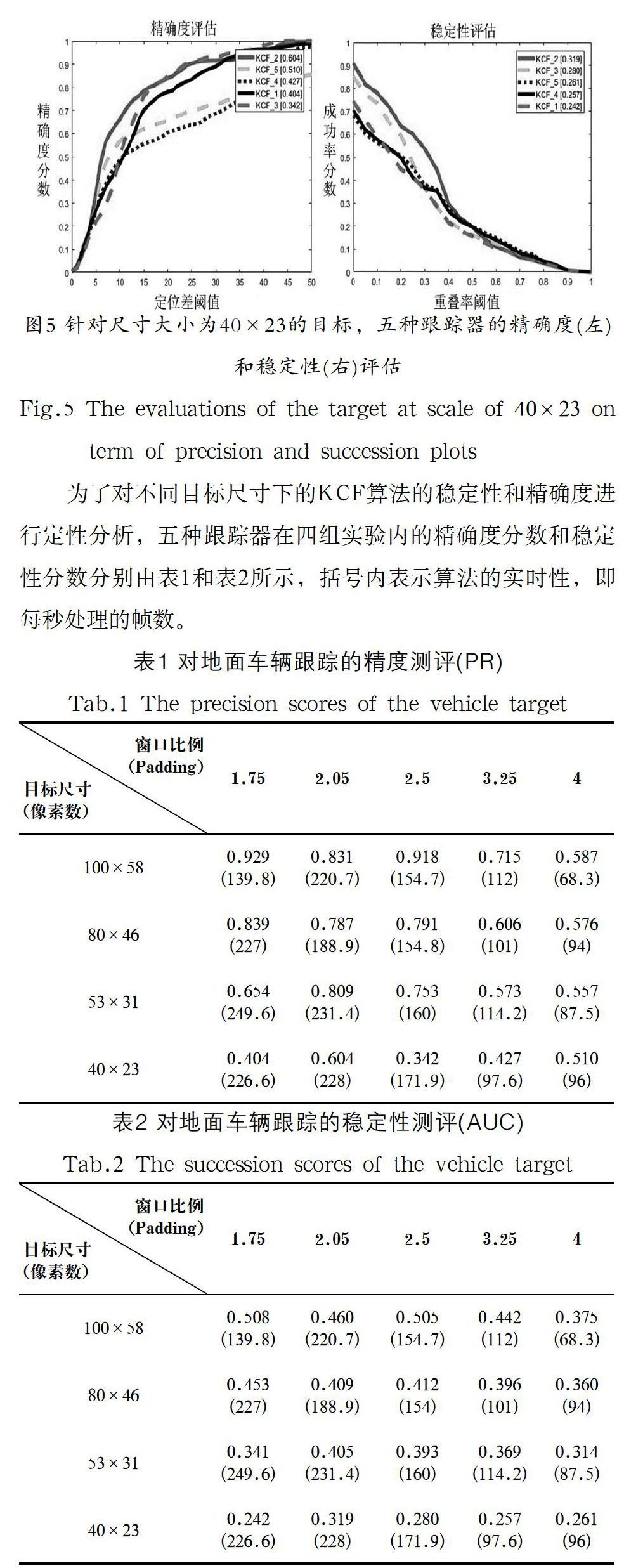
本次实验共四组,分别对应平均尺寸为100×58、80×46、53×31、40×23的目标的运动场景,每组有10个不同地面车辆的行驶视频。为确定针对不同尺寸目标的最优算法参数padding,即搜索区域与目标区域的边长比值,每组实验设定了五种padding值:1.75、2.05、2.5、3.25、4,分别对应跟踪算法KCF_1、KCF_2、KCF_3、KCF_4、KCF_5。四组实验结果分别由如图2至图5所示。
实验评价指标使用的是OTB2015[8]的标准数据集测评指标,包含精确度分数(PR)和稳定性分数(AUC),其评估原理如下:
算法测量出的目标中心与人工标定的目标中心的距离越小则算法的跟踪精度越好,而对不同视频帧测量出的中心距离通常是不同的。中心距离小于给定阈值的视频帧数占总视频帧数的比值可以作为精确度指标,当阈值范围从0变化到50可以得到精确度曲线(Precision Plot)。通常以20个像素作为阈值,获得精确度分数。由于四组目标的尺寸比分别为8:10:15:20,精度评估对应的阈值也相应设为20、17、11、9。
同理,算法测量出的目标区域与人工标定的目标区域重叠率越高,则代表算法越稳定。其中重叠率定义为:,a、b分别代表测量出的目标区域像素与人工标定的目标区域像素,、分别代表区域像素的交集和并集。对于不同视频帧,重叠率通常也是不一样的。重叠率小于特定阈值的视频数占总视频数的比值可用作稳定性指标,当阈值范围从0变化到1可以得到稳定性曲线(Success Plot)。为了避免单一阈值带来的片面性影响,我们使用稳定性曲线的面积(AUC)作为稳定性分数。
为了对不同目标尺寸下的KCF算法的稳定性和精确度进行定性分析,五种跟踪器在四组实验内的精确度分数和稳定性分数分别由表1和表2所示,括号内表示算法的实时性,即每秒处理的帧数。
4 结果分析(Results analysis)
由上表可知,对于尺寸为100×58到80×46的目标,padding值取1.75可以使KCF算法获得最优的精确度和稳定性;对于尺寸为53×31到40×23米的目标,padding值取2.05可以使KCF算法的精确度和稳定性双优。在实际场景中,对于尺寸大小为40×23到100×58的目标,可以根据具体目标尺寸,将padding值做更细化的调整;同理,对于尺寸为大于100×58内或小于40×23的目标,也应该相应选择小于1.75或大于2.05的padding值以获取可能的最优跟踪效果。
根据上表同样可得能满足最小跟踪精度要求的目标尺寸大小。由表1和表2可得,对于固定的padding值,当目标尺寸由大到小,对应的跟踪效果基本上满足由优到劣的变化趋势,这是因为目标尺寸越大,训练样本所包含的目标特征信息越丰富,故而训练出的跟踪器更贴合实际场景。通常情况下,精度值(PR)不小于0.85是跟踪器的最小精度要求,由表1可知,当padding选1.75时,目标尺寸不小于80×46,是满足稳定跟踪的最低要求(精确度不小于0.85)。而对于尺寸小于80×46大于40×23的目标而言,跟踪性能已经无法满足不低于0.85的要求了,所以此时我们可以降低最小精度要求至0.75。纵观五组不同padding值跟踪效果,可以看出当padding选2.05时,尺寸范围为80×46到40×23的目标跟踪性能可以达到最优,对于小于或大于2.05的padding值,无论是精确度还是稳定性都有变差的趋势。所以对于尺寸为40×23到80×46的目标,需要选取padding值为2.05以获得最优跟踪效果,如果降低跟踪精度性能的要求至0.75的话,可以选择小于53×31大于40×23的目标尺寸作为最低尺寸要求。
5 结论(Conclusion)
本文验证了,对于不同距离下不同尺寸的车辆目标,KCF算法能实现稳定的实时性跟踪任务,且不同的搜索区域与目标大小的边长比值参数padding,对于跟踪性能的影响很大。实验结果验证了,对于平均尺寸范围为40×23到100×58的车辆目标,如何在五组padding值中选取合适的参数以获得最优跟踪性能。且基于上述实验结果,可以合理推测对于尺寸小于40×23或大于100×58的车辆目标,为获得最优性能的KCF跟踪器,需要将padding值相应选取为大于4或小于1.75的值。另外,为了得到更为精确的实验参数,有兴趣的研究者们可以将本次实验的目标尺寸以及padding值进行更为细化的划分。
参考文献(References)
[1] YILMAZ A,JAVED O,SHAH M.Object tracking:A survey[J].ACM Comput Surv,2006,38(4):45.
[2] COLLINS R T,LIU Y,LEORDEANU M.Online Selection of Discriminative Tracking Features[J].IEEE Transactions on Pattern Analysis & Machine Intelligence, 2005,27(10):1631-1643.
[3] BOLME D S,BEVERIDGE J R,DRAPER B A,et al.Visual object tracking using adaptive correlation filters[C].proceedings of the Computer Vision & Pattern Recognition,F,2010.
[4] HENRIQUES J F,RUI C,MARTINS P,et al.Exploiting the Circulant Structure of Tracking-by-Detection with Kernels[M].Proceedings of the European Conference on Computer Vision,2012.
[5] HENRIQUES J F,CASEIRO R,MARTINS P,et al.High-Speed Tracking with Kernelized Correlation Filters[J].IEEE Transactions on Pattern Analysis & Machine Intelligence, 2015,37(3):583-596.
[6] GALOOGAHI H K,FAGG A,LUCEY S,et al.Learning Background-Aware Correlation Filters for Visual Tracking[M].2017 Ieee International Conference on Computer Vision,2017:1144-1152.
[7] DANELLJAN M,HAGER G,KHAN F S,et al.Learning Spatially Regularized Correlation Filters for Visual Tracking[M].2015 Ieee International Conference on Computer Vision,2015:4310-4318.
[8] WU Y,LIM J,YANG M-H.Object Tracking Benchmark[J].Ieee Transactions on Pattern Analysis and Machine Intelligence, 2015,37(9):1834-1848.
作者簡介:
黄 楠(1991-),女,硕士生,工程师.研究领域:火控系统.
路 锋(1970-),男,博士,高级工程师.研究领域:武器装备论证.
王钦钊(1973-),男,博士,教授.研究领域:火控系统.